无人车视频图像中目标物阴影去除方法研究
2018-08-29 07:20贺帅巩丽琴
汽车实用技术 2018年15期
贺帅,巩丽琴
(泰安航天特种车有限公司,山东 泰安 271000)
前言
无人驾驶汽车是计算机科学、模式识别和智能控制的技术发展与传统汽车产业相结合的产物。车载摄像技术的逐步成熟为无人驾驶提供了重要技术支撑,计算机视觉技术在无人驾驶中得到了广泛应用。在分析车载摄像头所拍视频时发现,由于景物遮挡或光照等原因,车载摄像头所拍视频中很多存在阴影,阴影会扭曲目标的形状,提高了目标识别的难度,利用形状的识别物体的方法不可靠。在后期图像处理中,提取目标物时阴影可能被误认为是场景[1]。因此,对影像上阴影区域的处理受到越来越多的关注。阴影去除包含两个重要方面:阴影区域检测和阴影区域去除。其中阴影检测作为处理算法的基础;阴影去除是将图像中阴影区域像素亮度和颜色通过相关处理使其达到和非阴影区域相同。
1 判断阴影是否存在
阴影判断是图像处理的首要前提,图像处理的首要任务是从实景图中提取前景目标,然后利用光照法判断阴影是否存在。通常定义变量nb, nd为图像的亮、暗像素个数,如果背景像素中的R、G、B值大于其对应前景像素的值,该情况下将前景像素认定为暗像素;如果情况相反那么就认定为亮像素[2]。按数学关系定义Sd, Sb为所选图像暗、亮像素的集合。通过公式(1)计算集合Sd, Sb的能量值Ed, EB。
在上述通常情况中如果图像的目标亮度比其阴影高,能量值反应了场景亮度,一般物体目标的可视程度用亮度能量值Eb来表示。在有光照气候晴朗的的白天,目标是清晰可见的,那么场景是高亮级。相反如果是在天气不好的阴雨天,那么场景将会是低亮级,这时目标会难以辨认。通常在有高亮度的白天才会产生阴影,可以利用亮度能量值的大小来作为阴影是否存的一句,同时通过参数Pd=nd/nb来作为图片中暗与亮的相对值。根据经验可知,如果亮度级相对较小或者在相对场景中阴影面积较小,对目标识别不会造成影响,则通常不对其进行阴影检测。
2 阴影的检测
在阴影检测中如果亮度相同的条件下,那么改物体阴影区域内外色调基本一致。以 RGB颜色空间作为研究样例,如果物体颜色整体系数均匀、成比例地减小时,只有亮度发生变化。色调是恒定的,也就是说如果R:B:G比值不变,那么图像的色调就不会改变[3]。阴影区域中的对象,由于颜色没有变化(或者变化很小,可以忽略),它只相当于将RGB分量的数值同时乘以系数 k,另一种情况下彩色图像在处理前进行预处理,进行灰度图像转化,将阴影部分的灰度乘以同一系数。

在图像处理中一般将阴影区视为半透明区,通常在阴影区域内,其相对于背景图像光学增益为固定值,并且其数值小于 1。背景像素点与阴影像素比率为线性关系。通过相关实验计算得出该比率值在1~2.5之间。基于理论研究可得,将当前图与其对应背景图相除,所得的结果就是阴影图像D(i,j)。通过绘制目标、阴影和带有阴影目标的灰度值柱状图,可以统计出阴影灰度值分布范围,这时通过设定阈值,即可区分出潜在阴影区域R(i,j)。

针对公式中R(i,j)中非零区域,利用梯度即可分析出图像的平坦度,进一步得到阴影范围。
3 阴影区域的去除
无人驾驶车辆车载摄像头在实际拍摄过程中,摄像视频受到实际驾驶时气候、光照、传感器及系统本身等因素的影响,使得所摄图像杂质较多干扰较多质量较低。这时图像质量低,那么在进行目标识别和提取时处理就会比较困难,所得结果也不准确。因此在图像处理之前要对所拍图像进行预处理,预处理的目的是为了减少各种噪声和随机干扰,从而可以获得有效信息,提高后续图像处理的真实性并增强处理结果的可靠性。在后处理中通常采用图像差分法,图像其实也是一组数字组合,图像处理也是一种数学计算过程[4]。差值图像反映了图像间差异信息,可以用作动态监测、运动目标检测和以及目标追踪、背影的消除及目标识别等,其算法流程图如图1。
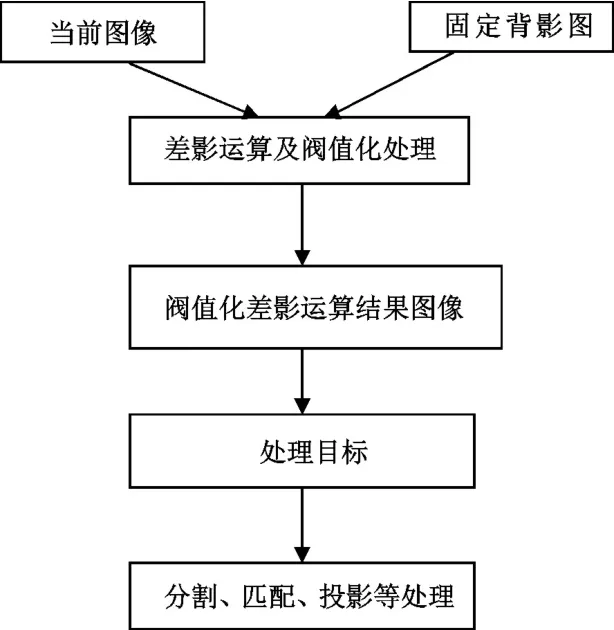
图1 算法流程图
差影法在实际应用中较为广泛。在监控系统中,通过分析摄像头所拍拍摄图像,将相邻时间段的的图像做差影,如若图像差别超过先前设置的阀值,那么系统就会提示有有异常的情况,从而触发系统警报。图像在做差影计算时首先要将两图像的对应像点分布于空间同一目标点上。同相同场景中如果利用系列图像相减来检测运动目标和目标变化,很难保证检测时准确对准[5]。这时就需要做更进一步的处理。一般假定差图像,如下公式所示:

如果△x 很小,那么上式可以近似为:


由上述公式可知,去除部分不对准的一幅图像的复制品就可以得到其偏导数图像。

其中 Ik(i,j)表示当前帧图像,b′k(i,j)表示当前帧背景,mk(i,j)作为运动部分,nk(i,j) 为图像的各种干扰噪声, bk(i,j)表示由场景图像中提取中的背景,通过处理将阴影区域检测出后,再将阴影区与目标物进行分离处理,即可得到所需目标物体。
4 结语
现有无人车视频图像中目标物的阴影去除算法主流方法为静态图像阴影去除法,在实际应用中,比如目标追踪、形状提取等图像处理中,通常首先通过算法检测出阴影区域,然后将阴影与目标物进行分离,即可得到目标物体,通常在处理中并不需要将视频中阴影全部去除;仅有在摄影测量和遥感成像等前沿领域,在检测出图像中的阴影之后,一般还需进一步减弱或消除阴影对目标影响,并恢复图像中阴影中目标本来面目,从而得到无干扰高质量图像,达到其研究目的。
猜你喜欢
航天返回与遥感(2022年4期)2022-09-03
北京航空航天大学学报(2022年6期)2022-07-02
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
家庭影院技术(2021年6期)2021-07-28
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27