
航空光电吊舱隔振器布局方式分析
2018-08-28 07:49:06史文欣刘仲宇徐迪孟付海双
激光与红外 2018年8期
史文欣,刘仲宇,王 平,徐迪孟,付海双
(中国科学院长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
航空光电吊舱是航空光电平台中的一种,在军事领域中,具有情报搜集、监视、侦测、目标获取、毁伤评估等功能。在民事领域中,具有森林防火和民事救援等作用。能否获得高质量的清晰图像是评价航空光电吊舱性能的重要指标,直接影响对环境的准确判断和情况的有效评估。
在以航空光电吊舱为主的机载光电设备中,除接收器和光学系统本身的品质外,制约航空侦察成像质量的主要因素是飞行器受到的振动会通过设备的安装点传至光电设备,影响光路稳定、成像质量、目标定位及数据引导精度等[1-4]。
2 理论分析
相机的成像清晰度由相机的移动速度和相机的快门时间决定:
其中,δx为像移量;Vx为像移速度;t为快门时间。由式(1)可知,像移量δx的大小取决于像移速度Vx的大小和快门时间t的长短。在选择相机时,可选择快门时间更短的相机来获得更好的成像质量,当相机选定之后只能通过减小像移速度来获得更好的像质。
航空环境中,光电吊舱的位移是由飞机载体的震动和飞行过程中的气流扰动等原因产生的,其中飞机载体的震动是主要的且稳定位移量产生源。因此,要对飞行器的振动加以隔离,从而提高动载体成像系统的清晰度与分辨能力、提高成像系统的图像质量和侦察效果[5-6]。
本文基于实际产品中的应用,在xx型光电吊舱(如图1所示)的隔振器布局设计中,采用了一种航空用的金属隔振器(如图2所示)。
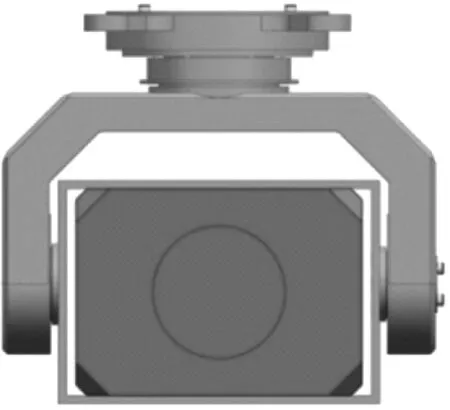
图1 航空光电吊舱Fig.1 Aerial optical-electronic pod
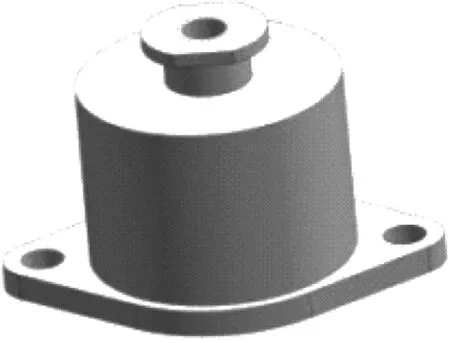
图2 隔振器Fig.2 Vibration absorber
2.1 光电吊舱平动分析
在隔振器的作用下,飞机载体的震动位移量与光电吊舱的位移量的关系为:

其中,m为光电吊舱的质量;u为安装基座的振幅;x为弹性支撑上光电吊舱的振幅;K为隔振器的弹性支撑在震动方向上的动刚度;C为隔振器的粘性阻尼系数。
式(2)可变形为:
由式(3)可知,当飞机载体的振动参数确定时,安装基座的振幅u为固定值,正常飞行时,若飞机载体的震动频率为ff,则每次震动的时间tf为:
tf=1/ff
(4)
由式(4)可知,当震动时间tf确定,u的一阶导数也可以相应的确定,从而可以得到确定条件下的x的值[7]。
当光电吊舱平动时,根据上述公式可知:
此时,成像质量主要由隔振器的减震振幅x、飞机每次震动的时间为tf和快门时间t决定,即当相机和飞机确定后,主要取决于隔振器的选择,在保证振动量级的传递率小并满足使用要求的前提下应选择震动幅度小的隔振器。所以,在光电吊舱平动时,隔振器的安装跨度对光电吊舱的成像质量无影响。
2.2 光电吊舱转动分析
当光电吊舱发生转动时,如图3所示,L代表隔振器的安装跨距,θ代表光电吊舱的转动角度,Δx为隔振器的减震振幅的差值,可知:
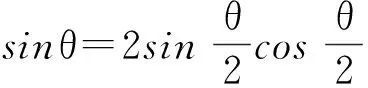


图3 x,θ,L的关系示意图Fig.3 Relationship between Δx,θ and L
由式(6)可知,当Δx一定时,跨距L与转动角度θ成反比,增大跨距L时可减小转动角度θ,根据式(1)的原理,当转动角度θ越小时,光电吊舱的角位移和角速度的值同样越小,光电吊舱的成像质量越好。
3 实验验证
为了验证上述理论,在初样设计时,采用了两种不同的隔振器的布置形式:
(1)在直径为100 mm的圆上均布四个隔振器;
(2)增加隔振器的跨距,在直径为180 mm的圆周上均布四个隔振器。
本文因为篇幅所限,以水平方向震动及减震效果为例,讨论使用相同隔振器在不同跨度的减震布局情况下的减震效果(隔振器为三向等刚度隔振器,竖直方向的震动响应情况与水平方向类似)。
3.1 小跨距振动试验
将光电吊舱上端的安装接口安装在如图4所示的四个隔振器上,布置在直径为100 mm的圆周上,均布4个。传感器的粘贴方式如图5所示,1号传感器作为控制传感器,安装在在振动台上,控制振动台输出频率为10~2000 HZ,振动量级位1g(重力加速度)的震动,2号传感器作为监测信号,粘贴在减震工装的上端,监测震动传递到减震工装上端的震动情况。3号传感器作为监测信号,粘贴在光电吊舱的框架上,监测光电吊舱经过隔振器后的震动特性。
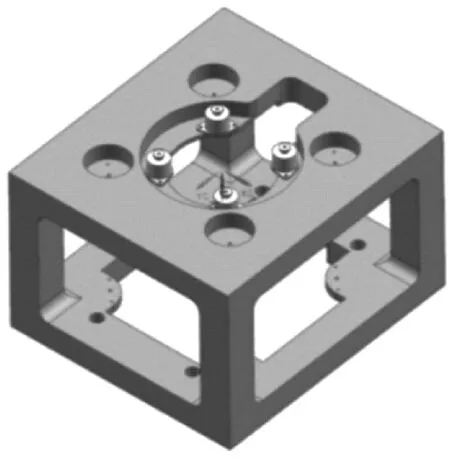
图4 小跨距安装方式Fig.4 Small track installation

图5 小跨距实验照片Fig.5 Picture of small track experiment
得到的振动数据如图表6所示。图中线1为信号1的振动曲线,线2为信号2的振动曲线,线3为信号3的振动曲线。
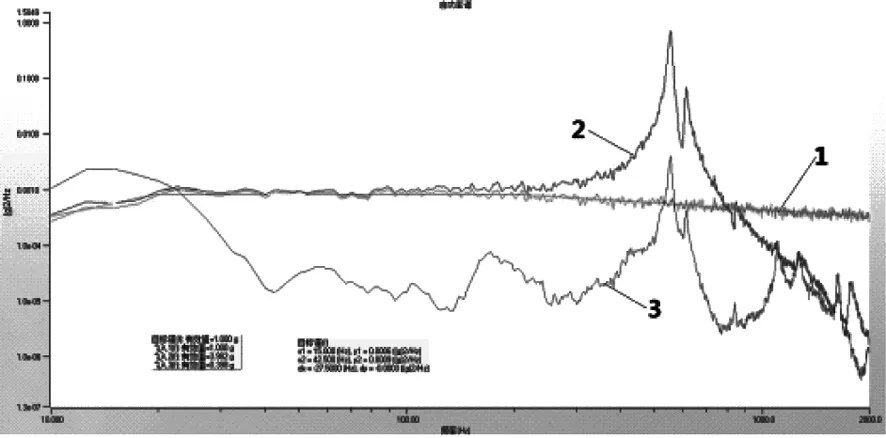
图6 小跨距振动曲线Fig.6 Vibration curve of small track experiment
由振动曲线可知,线1输入信号的输入量级有效值为1 g,线3信号说明通过隔振器的作用光电吊舱框架上的振动量级有效值为0.398 g。图线在15 Hz附近和550 Hz附近出现共振的尖峰,15 Hz为隔振器的共振频率,550 Hz接近减震工装的二阶固有频率559.295 Hz,从图线上看,在其余频率内光电吊舱框架均处于振动量级的有效的衰减状态之下。
3.2 大跨距振动试验
将光电吊舱上端的安装接口安装在如图7所示的四个隔振器上,将方案1中的隔振器布置的跨距由100 mm增加到180 mm,为了使用相同的工装和相同结构的光电吊舱,增加了一个转接板,以实现增加隔振器布局跨度的目的。传感器的粘贴方式与方案1相同,如图8所示。
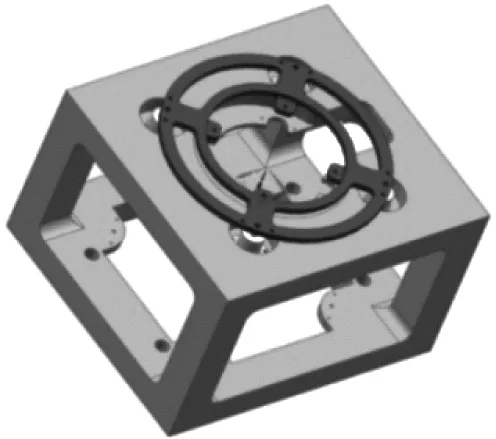
图7 大跨距安装方式Fig.7 Large track installation

图8 大跨距实验照片Fig.8 Picture of Large track experiment
得到的震动数据如图表9所示。图中线1为信号1的振动曲线,线2为信号2的振动曲线,线3为信号3的振动曲线。
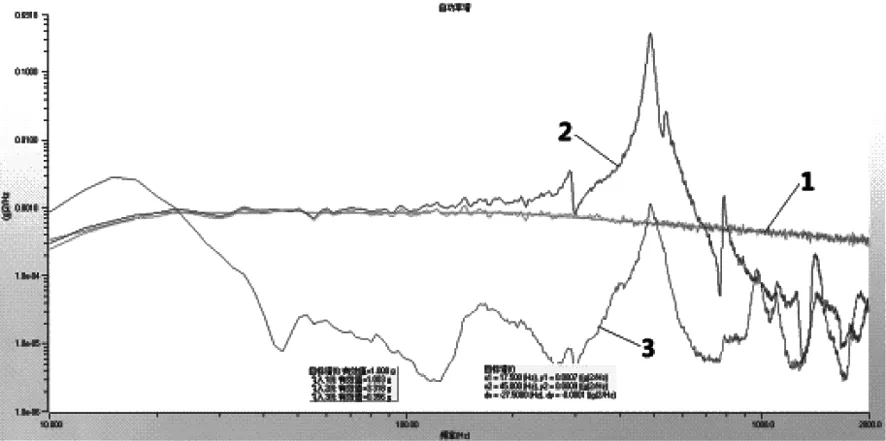
图9 大跨距振动曲线Fig.9 Vibration curve of large track experiment
由振动曲线可知,线1输入信号的输入量级有效值为1 g,线3信号说明通过隔振器的作用光电吊舱框架上的振动量级有效值为0.356 g。
与方案1的震动数据对比分析可知,在输入相同为1 g的条件下,光电吊舱的响应的振动量级由0.398 g减小到0.356 g。由于震动的测量方向是水平方向,光电吊舱震动过程中的摆动是一个转动过程,需要将水平方向的量级转化为转动方向的量级。
当θ角为小量时,θ≈sinθ,由经验公式可知,转动方向上大跨距的振动量级与小跨距的振动量级比a近似为:
说明本实验中隔振器通过增大跨距的布置方式将转动的振动量级减少了37.9%,即增大跨距的布局方式减小了光电吊舱转动过程中外部震动到光电吊舱的震动传递率。
4 结 论
本文以航空光电吊舱为例,通过理论计算分析和相关实验得到如下结论:
(1)选择隔振器的安装布局时,安装跨距的大小不会影响光电吊舱平动的成像质量。
(2)选择隔振器的安装布局时,更大的安装跨距会减小光电吊舱的转动过程中的角位移以及转动的振动量级从而提高整体的成像质量。
在今后实际产品的设计中,空间条件允许的情况下,根据结论,可以将隔振器的跨距加大,从而提高光电吊舱的成像质量以获得更加清晰有效的图像,对今后的减震布局设计有实际性的指导意义。
猜你喜欢
中国新技术新产品(2023年1期)2023-04-07 02:25:26
科学大观园(2022年14期)2022-07-17 03:54:41
中国科技纵横(2020年19期)2020-04-16 06:30:04
纤维复合材料(2018年4期)2018-02-18 19:02:51
城市轨道交通研究(2017年10期)2017-11-21 11:16:32
航空模型(2016年10期)2017-05-09 06:30:58
环球时报(2017-03-13)2017-03-13 08:41:02
锻压装备与制造技术(2015年2期)2015-06-26 09:00:30
中国舰船研究(2014年6期)2014-05-14 06:45:24
