
一种基于AES-CCM算法的安全车载CAN网络协议
2018-08-28 11:45朱立民李仁发
汽车技术 2018年8期
朱立民 李仁发
(1.吉利汽车研究院(宁波)有限公司,宁波 315000;2.湖南大学,长沙 410000)
主题词:信息安全 AES加密算法 智能驾驶 CAN网络协议
1 前言
智能网联汽车与其他车辆、基础设施等通信的过程中,其内部网络与外界产生大量数据交换,如果汽车外部通信网络信道被劫持,则使得针对汽车的网络攻击成为可能。
2007年,波鸿鲁尔大学的Wolf等人分析了汽车可能遭受的网络攻击类型并提出了对应的防御措施[1]。华盛顿大学的Koscher提出了特定的无线网络攻击技术,展示了智能汽车面临的网络安全问题,即当装有特定恶意软件的手机与汽车蓝牙设备相连接,展开短距离无线攻击即成为可能[2]。Brooks等人将可接入汽车网络的通讯手段进行分类,利用CERT分类法分析针对车载服务的攻击,结果表明,ECU中的固件升级时需要特定的安全保护,且需防范车辆与网络中心融合带来的安全隐患[3],如远程诊断服务。Schweppe等人[4-5]建议利用EVITA-HSM建立安全通信结构,采用32 bit消息认证码(Message Authentication Code,MAC),车内网络总线的特性使其可以抵挡持续35周的碰撞攻击,因此是足够安全的。然而,作者提出的安全架构过于抽象,既没有表述如何产生32 bit的MAC,也没有考虑到数据机密性和外部设备的连通性。为了保护车内网络免于遭受重放攻击(指当攻击者嗅探到数据消息和认证消息后,将这些内容重复放入CAN总线发送至目标ECU而达到攻击的效果)。Groza和Marvay提出一种类似TESLA协议的具有消息认证功能的CAN总线协议[6]。Woo展开了一次远程无线攻击车辆的试验,并根据CAN总线的特性提出一种安全CAN总线协议,结果显示该协议在通信延迟和负载方面表现较好[7]。
为了对车辆网络数据进行有效保护,需要从数据的机密性和可认证性两方面进行考虑。本文以车辆内部网络为研究视角,提出一种安全CAN总线协议对数据进行保护,使车内网络不能通过外部接口被利用,从而有效抵制汽车网络攻击。
2 研究基础
智能汽车通常搭载百余个ECU通过各类数据总线连接在一起,如CAN、LIN、MOST和FlexRay总线,其中CAN总线应用最为广泛。然而,CAN总线不具备数据的机密性和可认证性,总线上的恶意节点可以监听总线上的所有消息,甚至可以向其他节点发送恶意消息。因此,本文提出基于高级加密标准的计数器模式和密码块链消息认证码(Advanced Encryption Standard Counter with CBC-MAC,AES-CCM)算法的安全CAN总线协议以抵御外界网络攻击。
2.1 设计前提
针对智能汽车特殊的应用场景,安全CAN总线设计需保证3个前提:
a.安全协议不能增添过大的载荷。如图1所示,CAN数据帧的长度为16 Byte,其中数据域只有8 Byte。目前CAN总线的数据域已经有很高的利用率,为确保足够的安全性,MAC的长度至少为4 Byte,则CAN数据帧的有效载荷将减小一半,因此,此方法不符合应用场景。

图1 传统CAN总线协议
b.安全协议不能依靠很强的计算能力和存储能力。通常,车载ECU是具有有限资源的微控制器,如果设计中需要大量的数据计算和存储,普通ECU难以保证实时性。例如,非对称加密算法RSA算法不但具有很强的机密性而且具有认证性[8],符合本文的设计目的,但受ECU的限制不能应用于CAN总线上。
c.安全协议不能造成任何硬件修改。如果安全协议需要进行硬件修改,将造成成本增加、可移植性降低以及设计复杂化。安全协议的实现应在传统CAN控制器和CAN接收器的硬件基础上对协议本身进行修改,相比于EVITA项目中提出在汽车设计时增添硬件安全模块的策略[5],单纯的协议修改更容易被汽车制造商所接受。
2.2 设计思路
通过总结当前存在的针对智能汽车的网络攻击类型[2],Samuel Woo指出通过修改CAN总线等车内网络总线,使其具备机密性和可认证性即可抵御各种类型的网络攻击[7]。为实现CAN总线的机密性和可认证性,需要满足:ECU发送节点与ECU接收节点间必须以密文形式通信;包含MAC的数据帧只能由可信任的ECU发送节点生成;ECU接收节点可以验证MAC的正确性;不能存在相同值的MAC。
AES算法与CCM模式的结合不但可以满足设计中对机密性和可认证性的要求,AES-CCM算法还具有加密速度快、安全性能高、计算量低和所需存储空间小的优势。本着设计简单、高效和易实现的初衷,本文设计的安全CAN总线协议将保持传统CAN总线的帧格式。
从机密性方面考虑,AES-CCM算法可利用128 bit的密钥产生密文,安全性可以得到保证。但AES-CCM算法是分组加密算法,其分组大小为128 bit,而CAN总线的数据场最大只有64 bit,因此采用补位的方案,即所需加密数据小于128 bit时,进行补零操作以满足AESCCM算法的分组长度需求。
从可认证性方面考虑,用MAC替换16 bit的循环冗余校验(Cyclic Redundancy Check,CRC)域既可以提供数据完整性,也可以提供数据可认证性,即MAC可以检测数据帧中的恶意数据破坏,也可以检测数据传输错误,因此CRC场完全可以被MAC场取代。AES-CCM算法可以产生所需要的MAC,并可根据需要得到4 Byte、6 Byte和8 Byte等不同长度的MAC(本文采用4 Byte)。AES-CCM算法在MAC生成过程中引入随机数,即每次加密产生的MAC均不相同,因此本节设计的安全CAN总线可以抵御攻击者嗅探到有效数据帧对汽车进行的重放攻击。
3 设计方案
根据应用背景不同,本文提出2种设计方案实现安全CAN总线协议。
3.1 方案一
3.1.1 数据帧发送
如图2所示为方案一的安全CAN总线协议示意,共有3个ECU接入CAN总线。总线呈多主机通信,每个ECU既可作为发送节点,也可作为接收节点。当ECU需要发送数据帧且总线空闲时,即可发送。
数据帧发送前,ECU2将至多128 bit的明文P、附加消息A和随机数N组合进行格式化函数操作,然后利用高级加密标准的密码块链接(AES-Cipher Block Chaining,AES-CBC)算法生成T(即MAC):


图2 方案一的安全CAN总线协议示意
T的长度为32 bit,标准数据帧中CRC场的最大长度为16 bit,因此连续2个标准帧可以实现T替换CRC场。ECU2通过高级加密标准的计数器模式(AESCounter mode,AES-CTR)算法生成密文C:

至多128 bit的密文C和32 bit的T经过简单处理组成消息R,最终由连续的2个标准帧传送至目标节点ECU3。
通过AES-CCM加密算法对原始数据的处理,连续的2个标准帧构成了1个具有机密性和可认证性的安全CAN总线数据帧,完成方案一的安全CAN总线数据帧的发送。其中AES-CCM加密的过程为:
输入:N、A、P
输出:R
1.Formatting Function(N、A、P)->B0,B1,…Br
2.Y0=CIPHk(B0)
3.for i from 1 to r
4.Yi=Ek(B0⊕Yi-1)
5.T=MSBTlen(Yr)
6.Counter Generation Function(N)->Ctr0,Ctr1,…Ctrm
7.for j from 0 to m
8.Sj=CIPHk(Ctrj)
9.S=S1||S2…||Sm(“||”表示连接运算)
10.Return R=(P⊕MSBPlen(S))||(T⊕MSBTlen(S0))
3.1.2 数据帧接收
如图3所示,当目标节点ECU3从CAN总线上接收到来自ECU2连续的2个标准帧(单个安全数据帧)时,ECU3将数据场和CRC场中的内容组合成为AES-CCM解密算法中的输入参数R,另外的2个输入参数为附加消息A和随机数N(均预先存于ECU的ROM中)。通过AES-CCM解密算法,ECU3得到明文P、MAC和来自ECU2的T。将MAC与T进行一致性验证,如通过验证则返回明文P,否则丢弃明文并返回错误提示。AESCCM算法解密的过程为:
输入:N、A、R
输出:P or INVALID
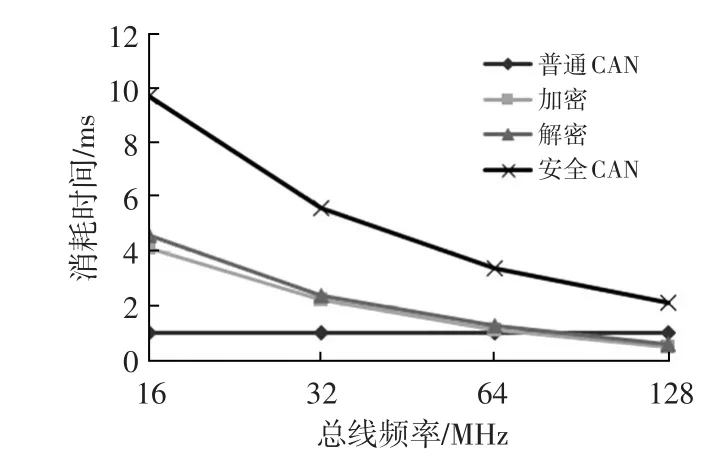
1.if Clen 2.Return INVALID 3.else 4.Counter Generation Function()->Ctr0,Ctr1,…Ctrm 5.for j from 0 to m 6.Sj=CIPHk(Ctrj) 7.S=S1||S2…Sm 8.P=MSBClen-Tlen(R)MSBClen-Tlen(S) 9.T=LSBTlen(R)MSBClen-Tlen(S0) 10.if N or A or P not valid 11.Return INVALID 12.else 13.Formatting Function(N、A、P)->B0,B1,… Br 14.Y0=CIPHk(B0) 15.For i from 1 to r 16.Yj=CIPHk(Bi Yi-1) 17.if T MSBTlen(Yr) 18.Return INVALID 19.else 20.Return P CAN总线协议包含2类数据帧,即标准帧和扩展帧,其不同点主要为ID场的长度,标准帧的ID长度为11 bit,扩展帧的帧ID长度为29 bit,如图3所示为CAN标准帧与扩展帧的对比。对于标准帧数据,可用扩展帧发送,即取其ID场中11 bit作为标准帧ID场,其余18 bit作保留位。本文中,方案二利用扩展帧发送标准帧数据,利用保留位中的16 bit发送MAC,其余置零。同时,CRC场用于搭载另外16 bit的MAC。最终由1个扩展帧构成的安全CAN总线数据帧可以发送32 bit的MAC和至多64 bit的密文。 图3 标准帧与扩展帧对比 如图4所示为方案二的安全CAN总线协议示意,在数据帧发送前,发送节点ECU2将明文P、随机数N和附加消息A作为输入进行AES-CCM算法的加密,得到MAC和密文。利用1个扩展帧作为单个安全CAN总线数据帧进行消息发送,其中32 bit的MAC由扩展ID场和CRC场共同发送,8 Byte的数据场用于发送密文。 图4 方案二的安全CAN总线协议示意 对于安全CAN总线数据帧的接收,当节点ECU3在总线上监测到扩展帧时,将CRC场和扩展ID场共同搭载的32 bit MAC、随机数N和附加消息A作为AES-CCM解密算法的输入。解密过程中,ECU3对MAC进行认证,认证通过则返回正确明文,否则抛弃该数据帧并返回错误提示。 两种方案均在传统CAN总线协议的基础上,利用AES-CCM算法作为加密算法实现安全CAN总线协议,具备机密性、可认证性和抗重放攻击的能力,均采用128 bit的密钥和32 bit的MAC,利用传统CAN总线的CRC场来发送MAC。两种方案均未对传统CAN总线添加任何硬件模块且没有对协议的数据格式进行修改,具有良好的兼容性。 在方案一中,消息的可认证性需要发送节点和接收节点同步操作,数据帧MAC认证需要接收节点取得完整的安全CAN数据帧单元后才可以进行,即存在认证延迟。同时,同步过程中数据帧的丢失将造成认证失败。而在方案二中,密文和MAC的发送仅需1个扩展帧即可完成,因此可以有效避免认证延迟和因帧丢失造成认证失败的问题,并且其通讯负载也将有所降低。然而,方案二的实现会导致扩展帧ID场长度由29 bit降低至11 bit,即仅支持标准ID场长度。 综上所述,两种方案有着相同的安全功能和安全等级。两者的区别主要体现在是否存在认证延迟,方案二高效利用了传统CAN总线协议,可以通过1个扩展帧来实现安全CAN总线协议数据帧,消除了认证延迟。因此,对于标准数据帧的发送,方案二更加具有优势。 本文采用2块16 bit飞思卡尔汽车开发板MC9S12XF512作为硬件开发平台,软件开发平台为飞思卡尔工具包CodeWarrior Version 5.0。开发板通过BDM下载器与PC机连接下载二进制代码,同时通过USBCANⅡ采集CAN总线上的数据。开发板通过LCD显示屏和串口调试软件显示内部数据。图5所示为安全CAN总线协议的试验平台。 图5 安全CAN总线协议试验平台 通常,ECU的CRC接口在出厂时会被屏蔽,用户不可以对CRC场进行任何修改。为了完成对安全CAN总线协议的性能评测,对方案二进行适当调整。车载ECU发送的CAN消息一般为8 Byte,本文设定CAN消息为6 Byte,其余2 Byte仿真CRC场发送MAC。 本节通过选取1组具体示例来验证方案的可行性。设定密钥K长度为128 bit,随机数N长度为56 bit,明文P长度为 48 bit,附加消息A长度为 64 bit: 根据AES-CCM加密算法进行理论推导,得到6 Byte CipherText和4 Byte MAC: 试验中,发送节点和接收节点在启动后立即进入初始化模式,初始化完毕后进入工作模式,并通过LCD显示已接入CAN总线。发送节点ECU将P、K、N、A通过AES-CCM算法生成CipherText和MAC,发送安全CAN总线协议数据帧(帧ID为10001000100,占用扩展帧的第4~14 bit)至总线。全部6 Byte密文和MAC前2 Byte通过扩展帧数据场发送,MAC后2 Byte通过扩展帧的第15~30 bit发送。 如图6所示为USBCANⅡ监测到的安全CAN总线协议数据帧。扩展帧ID的第15~30 bit的值为0x4f15,8 Byte数 据后 2 Byte为 0xce10,前 6 Byte为0x7162015bc051。监测到的数据帧数据同预期的密文CipherText和消息认证码MAC的值相同。 图6 检测到的安全CAN总线协议数据帧 接收节点ECU获取安全数据帧后,将CiphetText和MAC组合,并与随机数N、附加消息A和密钥K进行AES-CCM解密验证。验证通过则返回明文并通过LCD提示验证通过,如图7所示,否则丢弃明文并提示验证失败。 图7 安全CAN总线数据帧验证通过 分别对普通CAN总线、AES-CCM加密、AES-CCM解密和安全CAN总线在不同时钟频率下进行性能测定,性能对比结果如图8所示。当ECU的总线频率为16 MHz时,安全CAN总线通讯延迟远大于普通CAN总线延迟。随着总线频率的增大,安全CAN总线的通讯延迟迅速降低,当总线频率为128 MHz时,安全CAN总线的通讯可以在2 ms内完成。因此,随着车载ECU性能的逐步提升,本文设计的安全CAN总线协议可以高效地应用于智能汽车。 图8 各模块的性能对比结果 AES-CCM算法对比其他常用算法(如AES-ECB、MD5、SHA-3等)在数据加密和认证上具有明显优势。如文献[6]、文献[9]仅利用MD5和SHA-3算法所提出的安全CAN总线不能对数据机密性进行保护,因此攻击者可以对嗅探到的明文进行分析得到具体含义。虽然文献[7]与方案二均采用AES加密算法,但是CCM的加密模式破解难度更大。在数据认证方面,AES-CCM与MD5和SHA-3算法相比在处理速度和安全性能上处于平衡状态,既满足安全性的要求,也有较好的处理响应速度,同时可以抵抗重放攻击。表1所示为算法性能对比结果。 表1 算法性能对比结果 4.4.1 机密性 基于AES-CCM算法的安全CAN总线协议中,AES-CTR算法用于对数据帧的机密性进行保护。攻击者在总线上嗅探到的数据帧均为密文,在密钥未知的情形下很难进行逆向破解。算法的密钥长度为128 bit,如果通过穷尽攻击来获取密钥,需要进行2128次尝试。然而,根据CTR工作模式的特点,每次加密都会生成新的随机数,再考虑到ECU的处理能力和CAN总线的传输速度,通过穷尽攻击来获取密钥是不可能实现的。 4.4.2 可认证性 本文采用与文献[4]相同的32 bit的MAC。虽然Yasuda提出攻击者在接触到ECU内部固件的情况下,在有限时间内可以完成对32 bit的MAC进行破解[10],但通常攻击者很难接触到ECU内部固件,这种特殊情况不在本文的考虑范围内。攻击者可以通过分析已获取的MAC值结构来获取有效信息,但是在没有密钥的条件下仍不能获得正确的MAC值。生成MAC的密钥值在ECU中安全存储很难被窃取,因此攻击者只能通过猜测32 bit的所有可能MAC值进行攻击。在目前的CAN总线传输能力下,如果平均每10 ms进行一次密钥猜测尝试,则需要11 930 h来完成整个攻击过程[6]。同时,如果攻击者对目标ECU进行数据传输的间隔小于10 ms,总线会产生BUS-OFF错误,这意味着此节点将与CAN总线断开连接不能再进行有效的数据通信。 4.4.3 抗重放攻击 在本文的安全CAN总线协议中,数据帧具有可认证性,而MAC值是判断该数据帧是否有效的直接因素。在每个MAC的生成过程中都需要发送ECU节点和接收ECU节点共同管理的随机数作为输入参数,因此不同的安全CAN总线协议数据帧MAC值均不相同。当攻击者将嗅探到的内容发送到CAN总线上后,接收节点会检测到数据异常并进行抛弃处理。 本文针对普通CAN总线的设计缺陷,提出基于AES-CCM算法的安全CAN总线协议。通过对CAN标准帧CRC场的利用,使CAN总线具有机密性、可认证性和抗重放攻击的能力。利用2块飞思卡尔MC9S12XF512开发板作为试验平台实现了所设计的安全CAN总线协议,并对其可行性和通信延迟进行了分析与评测。结果显示,本文提出的安全CAN总线达到设计目标,且所带来的通信延迟可以被当前车载电子系统接受。3.2 方案二


3.3 对比分析
4 试验验证
4.1 试验平台

4.2 性能分析




4.3 算法性能对比

4.4 安全性分析
5 结束语
猜你喜欢
现代电子技术(2022年11期)2022-06-14
网络安全与数据管理(2022年2期)2022-05-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
密码学报(2021年5期)2021-11-20
计算机仿真(2021年10期)2021-11-19
科学家(2021年24期)2021-04-25
南京邮电大学学报(自然科学版)(2021年6期)2021-02-24
爱你·心灵读本(2018年6期)2018-09-10
爱你(2018年16期)2018-06-21
现代电子技术(2009年14期)2009-09-05
