
基于EPS的车道保持辅助系统设计
2018-08-28 11:45郭洪强陈慧陈佳琛
汽车技术 2018年8期
郭洪强 陈慧 陈佳琛
(同济大学,上海 201804)
主题词:车道保持辅助 电动助力转向 人机交互
1 前言
车道保持辅助(Lane Keeping Assistance,LKA)系统是典型的横向先进驾驶员辅助系统(Advanced Driver Assistance System,ADAS)。电动助力转向(Electric Power Steering,EPS)具有节能环保、符合驾驶辅助功能需求等优点,近年来在乘用车市场越来越多地替代液压助力转向[1]。随着EPS的普及,越来越多的LKA系统以EPS作为其执行机构。
但是,如何更好地集成LKA和EPS的功能,提升车道保持性能的同时,又能达到正常助力转向的目的,是必须解决的问题之一。文献[2]综合考虑跨道时间与驾驶员转向操作进行协调控制,系统存在LKA前轮转角控制模式和EPS常规助力模式的切换;文献[3]建立了联合预警算法,提高预警精度,并通过驾驶员操作辨识模型进行模式切换。转向系统存在模式切换直接导致LKA开启时转向助力消失,存在安全隐患。文献[4]设计了力矩叠加结构,在EPS助力力矩上叠加转角控制力矩,但没有考虑控制权限的转移。
文献[2]、文献[3]将跨道时间和驾驶员转向操纵作为LKA介入和退出的主要依据,对车道线检测置信度等考虑较少。国际标准化组织(ISO)、国际自动机工程师学会(SAE)以及欧盟新车安全评鉴协会(Euro NCAP)的测试报告也指出,车道保持系统的辅助行为不应突然终止,应平缓退出[5-7]。Volvo设计的驾驶员超驰(Driver Steering Override,DSO)策略引入了随驾驶员转向力矩、道路曲率变化的比例因子,LKA力矩在驾驶员转向时减小,但仍存在持续干扰的情况[8]。Cerone V等人设计的二自由度控制结构实现了自动车道保持和驾驶员操作的平滑切换,但系统状态过于模糊,实现较为困难[9]。文献[10]对LKA退出策略进行了设计,并利用主、客观评价方法优化了策略参数,提高了LKA系统的接受度,但并未考虑如何基于EPS系统实现。
为解决上述问题,本文对基于EPS的LKA系统进行了设计。在EPS扭矩传感器上叠加LKA辅助力矩,保证EPS助力功能始终开启;设计了LKA状态决策策略以及状态切换过程,避免干扰驾驶员。本文在离线仿真和驾驶模拟器半实物仿真试验的基础上,进行道路试验,结果表明该系统架构良好地集成了EPS功能和LKA功能,提高了系统的安全性和舒适性。
2 LKA控制策略
2.1 LKA系统架构
LKA系统可分为感知层、决策控制层和执行层三部分[11],如图1所示。感知层用于采集车道信息和车辆信息;决策控制层即车道保持辅助控制器,具体结构如图2所示;执行层为EPS系统,传统的EPS系统保留,保证了原车助力转向功能的完整性和稳定性,虚拟驾驶员转向力矩替代扭矩传感器检测到的驾驶员转向力矩。该结构使得EPS助力功能始终开启,无论LKA是否介入,驾驶员均可获得转向助力。感知层主要通过CAN总线获得传感器信息,决策控制层的车道保持辅助力矩控制如图3所示。

图1 LKA系统架构[11]
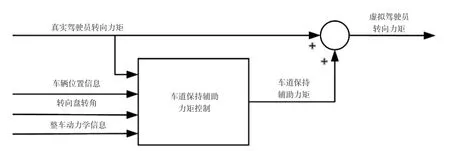
图2 决策控制层结构

图3 车道保持辅助力矩控制模块组成
2.2 状态决策策略
图3中的状态决策策略如图4所示,LKA系统具有关闭、待机和介入3种状态,状态的转换根据LKA激活条件和介入条件判断进行。定义激活条件系数α和介入条件系数β,辅助系数γ为α和β的逻辑与,即开启条件和介入条件同时满足时,取γ=1(介入状态),否则取γ=0(非介入状态),γ直接影响车道保持辅助控制器输出的力矩。

图4 LKA系统状态转换策略
决策过程首先进行LKA开启条件判断,判断流程如图5所示,当LKA激活条件满足时进行如图6所示的LKA介入条件判断,包括跨道时间判断和车辆返回车道中心判断。
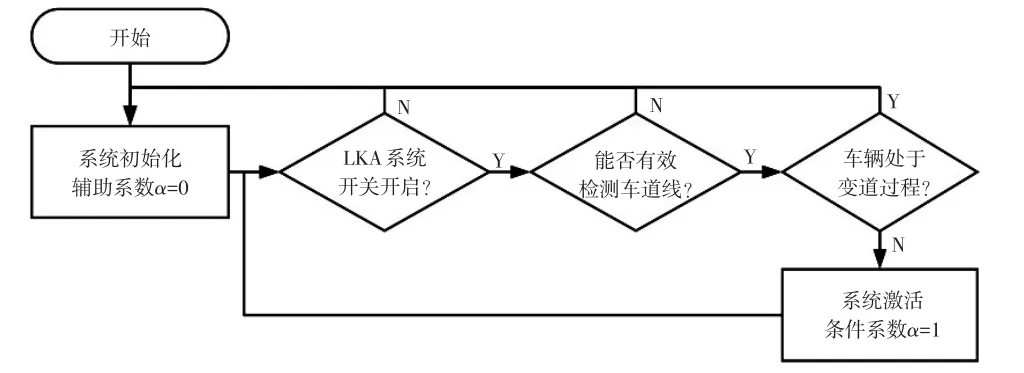
图5 LKA激活条件判断流程
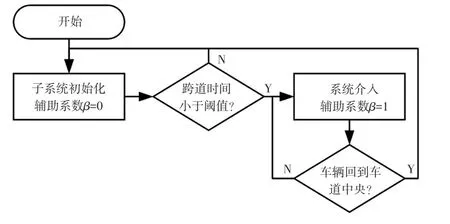
图6 LKA介入条件判断流程
2.2.1 LKA开关状态判断
LKA系统需要具有开关接口以保证驾驶员随时可以开启或关闭系统,避免系统对驾驶员持续产生干扰甚至引发事故。从人机交互装置接收LKA系统的开关信号,如果驾驶员关闭LKA系统,则激活条件系数α=0。
2.2.2 车道线检测质量判断
由于实际道路车道线质量参差不齐,且传感器车道线检测能力有限,一侧车道线短时丢失的情况时有发生。为避免LKA系统反复开关,当仅有一侧车道线质量置信度符合要求时,系统会根据默认车道宽度计算得到另一侧车道线。如果两侧车道线检测置信度均低于设定的阈值,LKA进入关闭状态。
持续检测到有效车道线是LKA工作的前提,为了避免摄像头检测到人行横道线等短距离车道线时系统误作用,置信度高于阈值一定时间后才认为有效检测到车道线。有效检测到车道线的判定条件为:

式中,v为车速,tlane为有效检测到车道线的持续时间,lthreshold为设定的阈值。
2.2.3 变道判断
变道判断考虑驾驶员力矩、转向灯开关、车辆横向偏移量等状态,判断流程如图7所示。

图7 变道判断流程
驾驶员力矩判断是为了避免LKA系统与驾驶员操作冲突,其判断条件为:

式中,Tdriver(t)为驾驶员转向力矩;MTthreshold为驾驶员转向力矩积分阈值。
若式(2)成立,则认为驾驶员主动接管车辆,LKA系统进入变道待机状态,调整激活条件系数α=0。
转向灯开关信息通过CAN总线获得,转向灯开启说明驾驶员主动进行变道,LKA系统进入变道待机状态,避免对驾驶员的变道行为产生干扰。
车辆横向偏移量大于设定阈值,约1/2车身已经偏出车道时应将车辆控制权交还给驾驶员,LKA系统同样进入关闭状态。
LKA系统进入变道状态后,直到车辆再次回到车道中心线附近而且偏航角小于设定值时,均判定车辆处于变道过程,即LKA系统始终关闭。
2.2.4 跨道时间判断
跨道时间(Time to Lane Crossing,TLC)指从当前位置运动至左前轮或右前轮触及车道线为止所经历的时间。考虑到LKA系统需要开启时驾驶员未对转向盘进行控制,即车辆直行,进行了简化,如公式(3)所示:

式中,f(l)为传感器输出的基于车辆坐标系的车道线方程,其值为车辆正前方l距离处的横向偏移量;tth为TLC的阈值;w为1/2车宽。
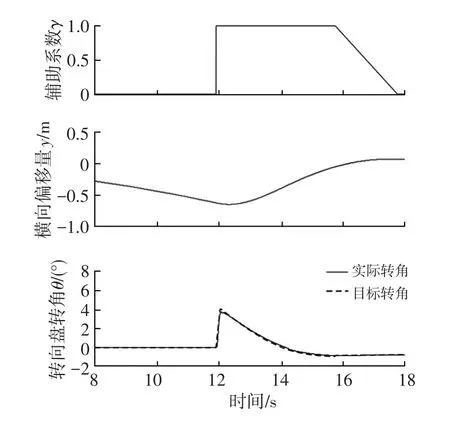
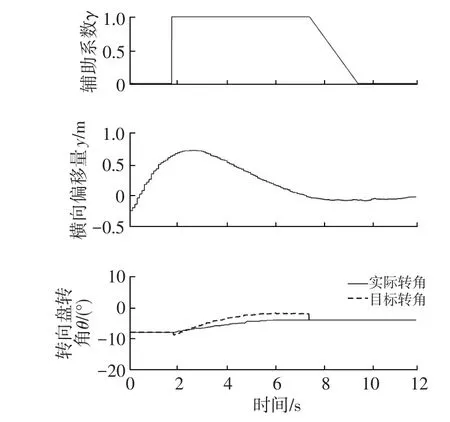
若f(tth·v) 2.2.5 车辆返回车道中心判断 LKA系统作为辅助系统不会持续介入太久,如果以同一TLC阈值作为LKA系统介入和退出的条件,会出现LKA系统介入后TLC变大,LKA退出,随后TLC又变小LKA再次介入,尤其在弯道中LKA易出现频繁介入和退出。因此TLC条件仅作为LKA系统的介入条件,当LKA介入后,进行车辆返回车道中心判断,如果车辆横向偏移量和偏航角均小于设定阈值,则认为车辆返回车道中心,调整β=0。 综上,状态决策的LKA系统开启条件判断与介入条件判断包含多个状态,由多个判断流程组成,采用Stateflow进行建模可以清晰地表达各信号、条件以及状态之间的逻辑关系。 车道自动跟随控制器的结构原理如图8所示,可分为横向位置控制器和转向盘转角控制器。 图8 车道自动跟随控制 2.3.1 横向位置控制 横向位置控制器根据车道线识别模块得到的道路信息及车辆位置信息对车辆进行控制,包含基于横向偏移量的PD反馈控制和基于曲率的前馈控制两部分。由于偏航角反映横向速度的大小,即横向偏移量的微分,考虑到进行微分运算可能导致的稳定性问题,因而采用对横向偏移量和偏航角的P控制: 式中,θr为保持车道所需要的目标转角;y为车辆相对于当前车道的横向偏移量;Ψ为偏航角;K为前方道路曲率;ky、kΨ、kR分别为根据车辆结构参数设计的控制增益,可以依据车速进行调整。 为了避免转向盘转速过高导致危险,θr的变化斜率受到限制;同时,为了避免LKA系统介入的瞬间目标转角与实际转角相差过大导致转速过快,在LKA系统未介入时令目标转角等于实际转角。 2.3.2 转向盘转角控制 将横向位置控制器计算得到的目标转角θr与转角传感器测得的实际转向盘转角θ作差,得到转角误差e,从而计算得到车道跟随力矩Tha。转向盘转角控制器可依据转角闭环系统性能指标要求进行设计,亦可采用PID控制器,其输出为: 式中,kp为比例项系数;ki为积分项系数;kd为微分项系数。 kp、ki、kd可依据车速调整,以适应不同车速工况;积分项对消除转角跟踪稳态误差具有重要意义,为了消除积分饱和的负面效应,同时可以快速消除稳态误差,为积分项单独设定了饱和值,积分项达到饱和值后不再增加。 为了便于对系统状态转换的过渡过程进行设计,输出力矩决策单元采用文献[8]提出的LKA力矩叠加结构。根据工作状态和虚拟车道跟随力矩获得车道保持辅助力矩Tlka=Tha·γ。输出力矩决策单元的输入γ和Tha,输出为Tlka。当γ=1时,LKA系统输出辅助力矩Tlka即为虚拟车道跟随驾驶员力矩Tha;当γ=0时,车道保持系统输出的辅助力矩Tlka为零。 由于LKA系统从正常工作退出到待机或关闭状态通常是由于驾驶员主动转向引起,此时驾驶员会紧握转向盘,因而保证在LKA系统从正常工作退出到关闭状态过程中车道保持辅助力矩退出得平稳、顺畅尤为重要,避免驾驶员转向手感不适甚至驾驶恐慌。为了达到上述目的,辅助系数γ的变化率受到限制,如图9所示。 同时,在辅助系数γ从1降为0的过程中,车辆位置的变化可能导致车道跟随力矩Tha的波动,从而使输出的辅助力矩Tlka波动,导致驾驶员手感不佳。如图9所示,采用选择模块在辅助系数γ从1降为0时切换到记忆模块存储的Tha值,保证输出的辅助力矩Tlka在状态切换过程中线性变化,从而保证驾驶员的转向手感舒适。 为了对控制器的性能进行测试验证,降低测试成本并提高安全性,本文通过Simulink仿真测试了车道保持性能,通过驾驶模拟器半实物仿真完善了人机交互相关的控制策略。 3.1.1 仿真模型 离线仿真结构如图10所示,车辆动力学仿真软件提供车辆模型与车道线检测信息,车道保持辅助控制器以及EPS系统模型在Simulink中搭建,车道线检测质量、转向灯信号等仿真输入也由Simulink实现。 图10 离线仿真结构 3.1.2 离线仿真结果 车速70 km/h直线道路仿真结果如图11所示,车辆逐渐偏离车道,第12 s时介入条件满足,辅助系数γ由0调整为1,此时车辆偏出车道中心线约0.7 m,LKA系统开始介入。转向盘转角变化率受到限制,转角平稳变化,车辆平缓返回车道中心线附近,此后,LKA系统主动平缓退出。 图11 直道LKA系统介入仿真结果 车速70 km/h时LKA系统在弯道中的仿真测试结果如图12所示,车辆横向偏移量0.2 m时LKA系统即介入。测试弯道包含左转弯和右转弯,最小曲率半径200 m,在LKA系统控制下车辆返回车道中心线附近,横向偏移量控制在0.09 m以内。 基于驾驶模拟器的试验平台同基于实车的试验平台相比具有变量可控、安全性高、试验成本低等优点,因此本文选择在驾驶模拟器上完善人机交互相关策略,如图13所示。利用虚拟交通场景软件搭建各式场景并即时显示;转向反力模拟设备通过反力电机模拟真实的驾驶手感;快速原型控制器内实时运行LKA控制算法。 图12 弯道LKA系统介入仿真结果 图13 固定基座驾驶模拟器 为了验证本文设计的LKA系统退出过程不对驾驶员产生干扰,在驾驶模拟器上进行了对比试验:驾驶员分别在LKA系统开启和关闭的状态下不开启转向灯进行变道超车操作,并记录对比驾驶员转向力矩、转向盘转角和车辆横向偏移量。试验结果如图14所示,两种情况下转向盘转角与横向偏移量变化过程接近,LKA系统退出时扭矩传感器值没有明显波动,驾驶员接管过程平稳,LKA系统未对驾驶员变道产生明显干扰,验证了LKA系统退出过程设计的合理性。 图14 LKA开启/关闭情况下的变道对比 道路试验在如图15所示的试验平台上进行,试验车为一款B级车。车辆安装了单目摄像头以检测车道线;控制器采用快速原型控制器;为了最大限度地保留原车EPS控制器的功能,对EPS扭矩传感器信号进行了替代,通过在原扭矩传感器信号上叠加辅助力矩值得到虚拟驾驶员转向力矩,EPS控制器会根据虚拟驾驶员转向力矩、车速及助力曲线控制EPS电机力矩,符合图1的系统结构。常见的EPS扭矩传感器输出信号有模拟电压信号和单边半字节传输协议信号等,通过对原信号解析获得扭矩传感器真实输出,叠加LKA辅助力矩后输出给原车EPS控制器,从而实现转向介入。 图15 实车试验平台 直道测试结果如图16所示,车辆偏出车道过程中LKA系统可以及时介入使车辆保持在车道中心,车辆最大横向偏移量达到0.72 m后平稳减小,5 s后车辆回到车道线中心。由于实车的转向盘小转角跟踪效果难以如仿真一样理想,车辆返回车道中心耗时较仿真要长。 图16 实车LKA系统直道介入试验结果 本文设计的力矩叠加架构可以将电动助力转向功能与车道保持辅助功能良好地集成在一起,提高了人机交互的安全性和舒适性。但如何选择最优的控制参数,以及实现驾驶员个性化自适应有待进一步研究。2.3 车道跟随控制器



2.4 输出力矩决策单元
3 离线仿真与半实物仿真
3.1 离线仿真
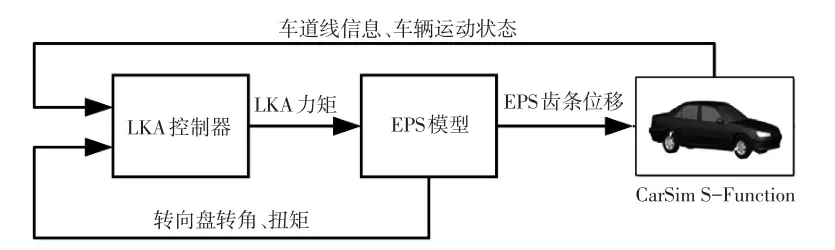
3.2 驾驶模拟器半实物仿真



4 实车道路试验
4.1 试验平台

4.2 试验结果
5 结束语
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
地理空间信息(2022年3期)2022-04-01
卫星应用(2021年11期)2022-01-19
电子制作(2019年11期)2019-07-04
小资CHIC!ELEGANCE(2019年20期)2019-07-02
计算机辅助工程(2018年4期)2018-10-09
中国建筑金属结构(2018年4期)2018-05-23
价值工程(2018年13期)2018-05-03
汽车与安全(2017年7期)2017-09-12
地震研究(2016年4期)2016-11-25
