现代矿井机车运输的智控系统设计
2018-08-26 10:52郝聪颖
机械管理开发 2018年8期
郝聪颖
(阳泉市燕龛煤炭有限责任公司, 山西 阳泉 045000)
引言
随着信息技术的高速发展,矿井机车运输智控系统已被逐步运用在我国现代矿井当中。但应用效果并不能达到预期的目标。分析其原因主要是故障率高和系统运行方式不合理等制约了其运行效果。针对这种情况,本文提出了一种全新的机车智控系统,用于解决现有系统的不足[1]。
1 矿井机车系统智控构架
运输部门在矿井管理中至关重要,影响采煤系统整体的成本。煤炭运输作业效率占煤炭开采效益一半以上。现代矿井机车运输的智控系统采用2层管理结构,包括地面和井下,调度站安装计算机管理系统,地下部分主要采用从属结构,由一个主站和若干变电站。系统分为固定设备和移动设备两部分,调度站和变电站是固定设备,移动设备通过无线视频相机监控矿井机动车辆,变电站被放置在4个不同的位置;每个变电站负责接收传感器信号和分叉位置信号,视频信号的无线视频传输和输出控制根据逻辑控制器从主站发出信号。光缆连接在主站和变电站之间。
地面建立计算机管理系统,由工业计算机、液晶显示器组成。PC用于显示所有机车的地下信息,可随时读取并存放数月。机车运行状态随时可调用,为机车监控的管理提供了极大的方便。
2 矿井机车远程信息读取的系统环节实现
为了实现远程图像监控矿山机车,监测系统主要包括以下三个部分:无线矿用机车行驶记录仪、传输系统、监控平台。录音机安装在机车上不仅能收取信号,还可以压缩和存储图像并无线wifi传输。视频传输主要通过Wi-Fi无线。沿公路安装光缆,监测平台的中心设在地面上,便于工作人员监视运行的地面矿井机车图像,定位和调度机车。如图1所示[2]。
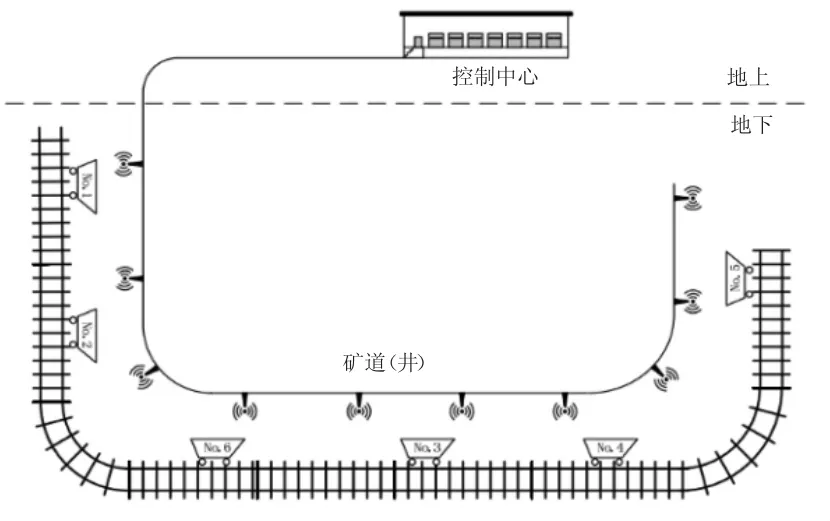
图1 矿井信号发射器与控制中心布置关系图
无线视频通信系统的布局。无线视频通信系统由发射和接收两部分组成;发射机安装在机车上,接收机则悬挂在相应位置的隧道内。测试结束后,接收机与发射机之间的传输距离通常为1 000m。考虑光缆接入点位置及机车运动规律,系统接收机位置遵循以下原则:有三段直线隧道路面,距离是500m,2 000m,2 000m,隧道需要五个接收器(信息参考某重点煤矿示范单位信息)。
本文主要介绍矿用机车行车记录仪的设计。行驶记录仪解决了带宽限制问题。无线传输确保图像质量,以及利用H.264压缩标准与无线Wi-Fi传输技术实现实时监控。详情如下:照相机的安装和监视范围只用公共照明系统覆盖煤矿巷道,光线较暗淡。采用高分辨率红外摄像机来改善,可以拍出更清晰的图像。除了上述之外,机车车头上安装了2台照相机。一个观察前面的路,另一个可以观察后方路况和来车。这2台相机连在一起,可以扩大监控范围。示意图如下页图2所示[3-4]。
质量和速度是图像处理的两个关键因素。首先,压缩图像质量将不仅有对图像解码重建影响其清晰度,这将进一步影响图像回放与远程视频监控结果。此外,压缩率的大小会影响图像存储容量与无线传输效率等。为了实现高质量的图像压缩,设计利用ARM Cortex-A8 core-s5p-v210processor由三星执行单元进行图像压缩。无线矿用机车行走记录仪是基于H.264在linux系统上完成图像压缩。使用A8核心的标准和无线传输CPU保证远程图像的实时性和稳定性监测。视频处理模块采集模拟信号75Ω、视频采集器1Vp-p,组成视频输入信号,通过电感和电容进行滤波和放大电路。组合视频信号被定义为包括亮度和色度的单一模拟信号,系统采用模块化设计,具有使用方便,容易维护的特点,所以安装调试不会影响正在进行的煤矿开采。录音机的应用大大提高了安全监测和运行管理效益。
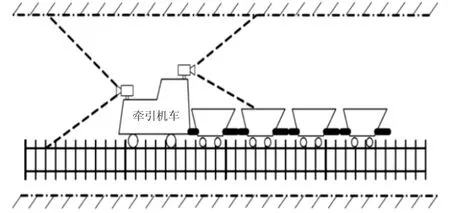
图2 牵引机车发射器及其发射范围示意图
3 矿井机车智控系统中管理系统的组成与功能实现
3.1 发射机
发射机安装在机车上,包括无线视频发射机、电源、液晶显示器。无线视频发射机负责收集信息。由接收机向控制站发送工作状态,对接收到信息提供调度信息。另外两个摄像头有必要确保双方现场充分捕捉,这部分详细信息第三节已经有详细说明。
3.2 变电站接收部分
变电站结构由无线视频接收器、传感器、信号灯、道岔、光电转换器信号收集器组成。无线接收机从无线视频中采集微波发射机,然后解调成复合视频信号,这是主要的视频信号调度站。道岔由控制部分、显示部分、信号采集部分组成。信号收集器利用交换信号将输入和输出信号转换为网络信号。无线视频接收机是无线视频接收机的接收部分,包括天线、低噪声放大器、本地振荡、混频器、中频放大、视频输出模块。
3.3 隧道运输至控制站机车
机车智控系统实现机车运行的全过程、运动方向和运行速度的控制。如果没有任何信号反馈,系统之间的单轨铁路,机车碰撞容易发生事故。如有机车牵引安装机车监控系统的机车应严格按照信号移动。信号控制系统根据应用要求,占用和解锁进入,以保证机车运行安全。同时,机车如果不按驱动信号,系统自动报警。机车监控系统还将记录现场信息,方便随时阅读查询。如果发生事故,如坠落、碰撞、追尾等事故,将对事故原因进行录像分析。这样的策略优点在于传感器少,可靠性高,维护量小[5]。
4 结语
研究开发的现代矿井机车运输的智控系统,基于无线视频技术的管理和矿用移动记录仪,扩大了对机车的控制范围,同时利用视频处理技术可实时对机车定位,实时监测机车运行速度等重要参数,可见,该系统具有相当大的扩展空间。该系统理论上具有通信速率高、功能强等特点,抗干扰能力强、保密性强、距离远、目标识别速度快等技术优势,使矿井机车运输系统可以有效适应复杂和苛刻的井下工作环境,但是系统的可靠性需要现场进一步检验。
猜你喜欢
家庭影院技术(2021年3期)2021-05-21
哈尔滨铁道科技(2020年3期)2021-01-18
铁道通信信号(2020年5期)2020-09-21
科技传播(2019年24期)2019-06-15
铁道通信信号(2019年2期)2019-03-26
电子制作(2018年9期)2018-08-04
电子制作(2018年12期)2018-08-01
消费导刊(2018年8期)2018-05-25
中国铸造装备与技术(2017年3期)2017-06-21
铁道通信信号(2016年10期)2016-06-01