胶带输送机特性与控制分析
2018-08-26 10:51张保安
机械管理开发 2018年8期
张保安
(阳泉煤业(集团)有限责任公司奥伦胶带分公司, 山西 阳泉 045000)
引言
胶带输送机是有电机驱动然后由输送带来进行货物运输的设备,常见于运输粮食,沙子等物资。胶带输送机的运输有长距离和短距离之分,其中长距离运输机的驱动系统多采用变频调速系统。这一系统由变频装置和控制系统组成,主要应用于输送机的调速驱动过程[1]。采用这一变频调速系统的输送机,无论其载荷大小,都能够准确的控制胶带输送机的启动和停止,使这一过程处于动态功率平衡的状态,并且这一系统的应用对于系统整体性能和可靠性的提高都具有十分重要的意义[2]。
1 胶带输送机特性分析
1.1 胶带机输送机张力特性
胶带输送机的组成元素很多,其中主要有运输带,发电机,驱动装置和保护装置。其他部件如减速机,张紧装置等也必不可少。不同用途的胶带输送机的组成元素也不尽相同,例如用于运输煤的胶带输送机还配有给料机、料库、和收尘器等部件。
根据胶带输送机组成元素的属性来判断,胶带输送机在工作的过程中会出现启动加速和停止减速的运动状况,其运动力学特征体现在横向振动、纵向振动以及张力波的叠加,但这些特征往往会造成运输系统的可靠性降低,严重时会导致运输带断开,配料损失和跳带。一旦出现这些现象,就会给企业造成巨大的损失,由此可见,阻碍张力波的扩散与堆叠,增加运输系统的可靠性对企业的安全生产具有十分重要的意义。要想防止跳带和输送带断裂等现象的发生,就必须要对输送机的动态运输过程进行严格的监督与控制,这不仅能够延长胶带输送机的工作寿命,而且能够大大削弱输送机运输过程中的不安全因素,在一定程度上为企业节约了成本,增加了收益。
由此可见,驱动设备在整个胶带输送机的系统中占有十分重要的地位,甚至能够影响到整个输送机的性能,因此在驱动设备的选择上一定要慎重,在已有的输送机中,驱动设备常见的有调速型液力耦合器,但是这一驱动设备存在许多缺点,不仅工作效率低,消耗电能大,而且在出现故障时维修起来也十分复杂。最严重的一点是由于启动速度过快,运输带的可靠性和稳定性都极低,对输送带的稳定安全运输造成威胁。
1.2 胶带输送机负载特性与机械特性
胶带输送机受到多种阻力,在进行阻力矩计算时就显得尤为困难,针对这一难题,现有的解决方案是将阻力矩看为一个整体,即电动机上的恒力矩负载。并且将胶带输送机上受到的各种阻力进行分段计算,首先启动力矩即为我们想要计算的静态阻力矩TL,计算公式如下:
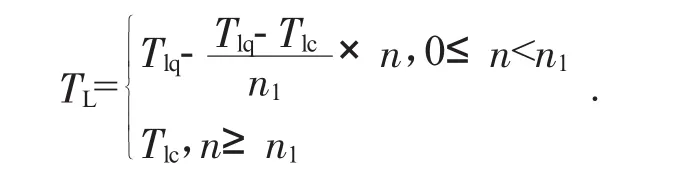
胶带输送机机械运动方程为:

式中:Tlq为最大负载力矩;n1为额定负载转速;Tlc为额定负载力矩;TD为输出电磁转矩;GD2为电机飞轮转矩与换算到电机轴上的负载飞轮转矩之和。
电动机运动状态的判断条件:△T=TD-TL>0,且d n/d t>0, 则 为 电 动 机 加 速 ;△T=TD-TL<0,且d n/d t<0,则为电动机减速。
胶带输送机的初始起动条件为:胶带输送机的各种驱动系统的力矩之和比启动力矩大时,胶带运输机启动,即△T=TD-TLq>0。
1.3 优化的速度及加速度驱动模型
在进行驱动模型的速度优化时,运输带的变形及震荡可以忽略不计,那么我们可以认为运输带的速度与电动机的转速成正比,即n=kv,下面将这一公式带入速度优化模型进行计算。在胶带输送机运输的启动阶段,由于运输带的张力特性,会导致运输带震荡或者跳带。针对这一现象,相关人员提出了在输送系统中增加低速预张紧的步骤,这一方案能够使张力均匀后输送带再继续按优化的模型进行运动,对于驱动器获得良好的低速性能具有十分重要的影响。
优化曲线速度模型公式如下:
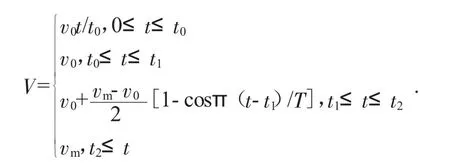
则加速度a=d v/d t曲线模型可以表示为:
式中:T为启动周期。
图2为优化“S”的曲线模型中速度、加速度随时间的变化曲线。如图所示曲线①代表速度随时间的变化情况,曲线②代表加速度随时间的变化情况。

图2 为优化“S”,曲线的速度、加速度模型
优化后的模型可以用于长距离胶带输送机,由图2可知,由于启动时间较长,为了满足其性能要求,调速驱动的方式应选择性能较高的。在运输带运输过程的监督和控制方面,可以采用速度闭环矢量的控制方法,这不仅能够使其拥有良好的低速性能,同时还能优化速度模型,使运输带的输送处于速度和功率的动态平衡状态。
2 变频调速控制系统的设计与实现
2.1 多台电机驱动皮带传动方案
本系统由变频装置和控制系统组成,主要应用于输送机的调速驱动过程。采用这一变频调速系统的输送机,无论其载荷大小,都能够准确的控制胶带输送机的启动和停止,使这一过程处于动态功率平衡的状态,并且这一系统的应用对于系统整体性能和可靠性的提高都具有十分重要的意义。
2.2 主从驱动方案
主从传动最大的区别在于其控制方法不同,这一方案是将系统中的一台驱动为主传动,剩余都作为从传动控制,并且PLC和各驱动利用PROFiBUS-DP来进行信息的交流,组成一个多电机驱动皮带的系统。
2.3 降低电网谐波含量
电网谐波含量的降低对于长距离胶带输送机的性能优化也具有十分重要的意义,目前主要通过调整变频器的脉动配置以及进线变压器的接线方式来降低电网的谐波含量。
2.4 PLC控制实现
主从控制器PLC所给定优化后的曲线启动模型是变频器接收的速度信号,电机轴编码器发出的脉冲信号则是变频器接收的速度信号后给出的反馈,运输带的速度沿着给定的曲线模型随时间而变化,同时主从传动之间进行转矩控制信号的传递来使电流和功率处于平衡状态,胶带输送机的停车过程就应用了这一原理,当卸料完成后,控制器发出停车指令,变频器随之发出脉冲信号作为速度信号的反馈,随着时间的变化,胶带运输机抱闸,停止运行。同时变频器的信号值由人工控制输入,这一功能大大便利了人们对于胶带运输机的监督与控制。
2.5 通讯及监控信号接口
为了更好的控制胶带运输机的输送系统,将现场总线作为PLC和变频器的通讯接口,在进行运输过程数据控制的同时,还可以利用控制参数等方法来监督和控制胶带运输机的输送系统。
1)从控制器到变频器的给定信号如表1所示。

表1 从控制器到变频器的给定信号
2)从变频器到控制器的信号如表2所示。
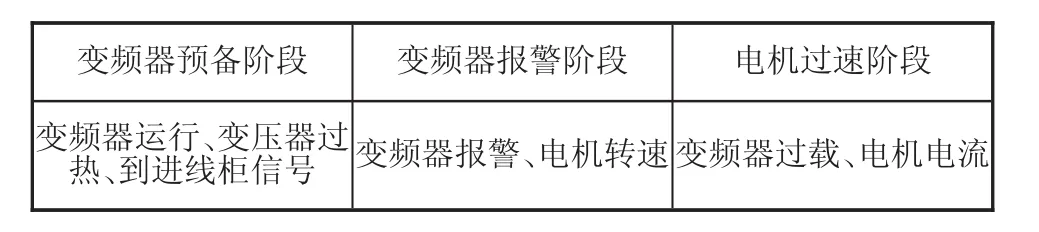
表2 从变频器到控制器的信号
3 项目运行
将上文的研究结果应用到生产实践中,安装变频器后,大大增加了胶带运输机的可靠性与安全性,降低了启动电流,胶带运输机发生故障后维修难度降低。将实际安装了变频器的运输系统进行功率核算,数据表明,优化后的胶带运输机的输送系统每年近似节省了1.5万kWh的电能,节能效果十分明显。
4 结论
长距离的胶带运输机在启动要求的性能较高,为了更好的进行胶带运输机的监督与控制,在了解胶带机输送机负载特性与机械特性的同时,要建立速度和加速度的优化模型,减少电网谐波的含量,实现PLC的控制,同时为了保持速度和功率的动态平衡,高精度的变频调速装置必不可少,这一装置能够将转矩电流与励磁电流分割开来进行控制,并最大程度的节约电能,同时建立多电机传动的方案,将这些措施应用到实际中,必定能够大幅优化胶带运输机的性能。
猜你喜欢
军事文摘(2020年15期)2020-08-15
中国煤炭工业(2019年3期)2019-08-27
建材发展导向(2019年11期)2019-08-24
学苑创造·B版(2019年8期)2019-08-09
小学生学习指导(小军迷联盟)(2018年10期)2018-10-12
童话世界(2018年20期)2018-08-06
现代兵器(2017年4期)2017-06-02
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
中学科技(2015年2期)2015-04-28