
暗物质粒子探测卫星有效载荷综合测试系统的设计与实现∗
2018-08-24 06:11徐遵磊张永强哲藏京京张云龙郭建华蔡明生常
天文学报 2018年3期
徐遵磊张永强†张 哲藏京京张云龙郭建华蔡明生常 进
(1中国科学院紫金山天文台南京210008)
(2中国科学院暗物质与空间天文重点实验室南京210008)
(3中国科学院大学北京100049)
(4中国科学技术大学近代物理系合肥230026)
1 引言
暗物质粒子探测卫星(Dark Matter Particle Explorer,DAMPE)[1−2]主要科学目标是通过观测高能宇宙射线来寻找暗物质粒子存在的证据,并开展宇宙射线起源及空间天文等方面的研究[3−4].暗物质粒子探测卫星有效载荷[1−2](以下简称有效载荷)包含4个探测器分系统,自上而下分别为塑闪阵列探测器(Plastic Scintillation Detector,PSD)、硅阵列探测器(Silicon-Tungsten tracKer converter detector,STK)、BGO(Bismuth germanate)量能器和中子探测器(Neutron Detector,NUD).位于顶部的塑闪阵列探测器主要用于入射粒子电荷的测量以及作为反符合探测器区分带电粒子和伽玛射线;硅阵列探测器用于提供高位置分辨的径迹以及测量入射粒子的电荷[5];BGO量能器测量入射粒子的能量,并根据入射粒子在BGO量能器中簇射行为的不同区分电子和质子;位于底部的中子探测器辅助BGO量能器区分电子和质子[6−7].除了4个探测器之外,有效载荷还包括一个载荷数管分系统.
有效载荷结构如图1所示,各分系统之间有多种硬件接口、复杂的控制流和数据流,同时有效载荷有多种系统工作模式来完成各种功能.载荷数管分系统(包括载荷管理器、载荷数据处理器和DC-DC(Direct Current-Direct Current)电源机箱)作为有效载荷与卫星平台之间的桥梁,接收卫星平台发来的控制命令并分发到各个探测器分系统,采集存储各个探测器分系统的状态信息和科学数据发送给卫星平台,从而实现对有效载荷各个探测器分系统的管理,同时为各个探测器分系统提供二次电源[8].5个分系统作为一个整体协同工作,在触发逻辑[9−10]控制下完成一次事例信息的采集和存储.
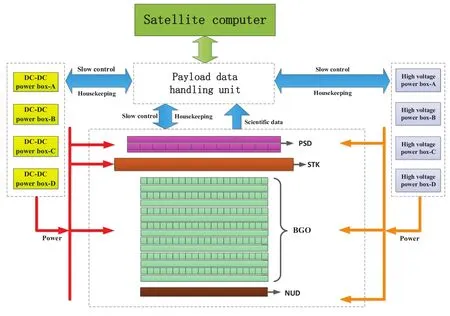
图1 有效载荷结构图Fig.1 Payload structure diagram
为了确保有效载荷作为一个整体正常工作,在发射前需要研制一套综合测试系统(以下简称综测系统)模拟卫星平台对有效载荷各种功能进行系统性测试.本文基于虚拟仪器技术研制了有效载荷综测系统,介绍了其功能和软硬件设计,并将该系统应用到有效载荷研制的各个阶段.
2 系统需求分析及设计
2.1 需求分析
有效载荷系统测试的目的是验证有效载荷各分系统、有效载荷与卫星平台之间的各种接口和通讯协议、各分系统软硬件功能,同时借助宇宙线对探测器性能进行标定.
为了完成模拟卫星平台这项任务,综测系统需要具备以下主要功能:
(1)支持有效载荷与卫星平台之间的硬件接口.
(2)支持对有效载荷各种指令和配置参数的管理.
(3)实现有效载荷与卫星平台之间的1553B总线通讯协议及1553B总线的监听功能.
(4)能够接收有效载荷的遥测参数和科学数据,对各种数据包存储并进行相应的解析和分级处理.
(5)需要实现对载荷所有状态信息的显示和分析功能,用于帮助测试人员对载荷状态和测试中出现的故障进行分析判断.
(6)为了对探测器的功能进行验证,需要重建采集到的宇宙线事例信息并进行判读.
2.2 系统设计
有效载荷测试期间放置在洁净厂房,参加测试的人员都在控制室,且测试系统需要多台设备协同工作才能满足测试需求,因此这里将测试系统构建成一个分布式局域网络系统,各测试设备间的通讯依靠TCP/IP(Transmission Control Protocol/Internet Protocol)协议完成.综测系统构成和数据流如图2所示,共包含6个部分:载荷控制前端、数据接收前端、控制中心、数据存储服务器、多个载荷状态监视和科学数据判读终端.
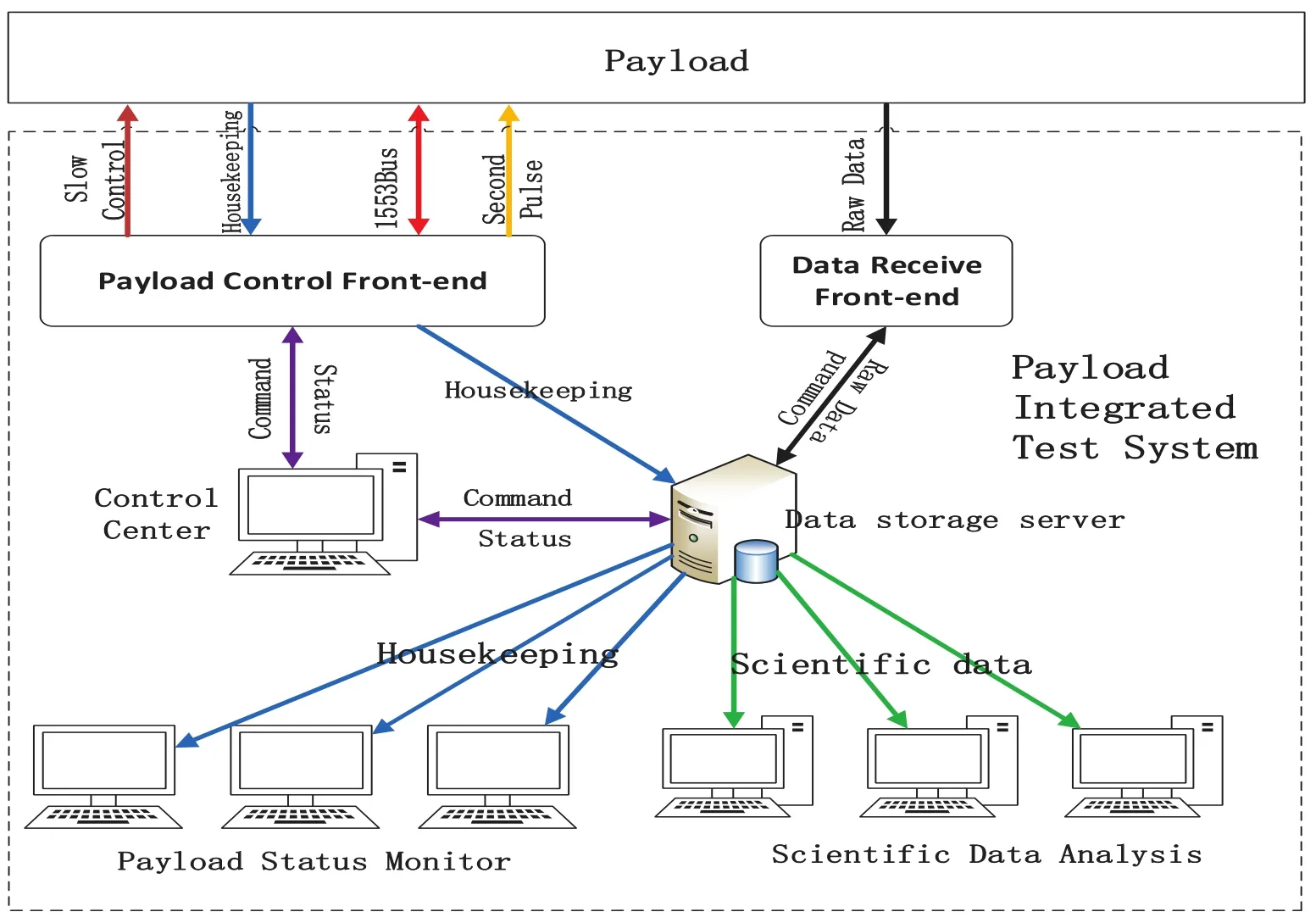
图2 综测系统构成和数据流Fig.2 Constitution of the integrated test system and the data flow
控制中心是整个综测系统的管理核心,所有对有效载荷以及其他测试设备的命令和配置文件均由这里发出,同时负责整个综测系统的管理和提供各种人机操作界面;有效载荷控制前端负责综测系统与有效载荷之间的控制接口,接收控制中心的命令并发送给载荷,采集载荷遥测参数并发送给数据存储服务器;数据接收前端接收载荷高速LVDS(Low-Voltage differential Signaling)链路上发送的原始数据流,其中包含了载荷的工程参数和科学数据,在本地备份后转发给数据存储服务器;数据存储服务器接收原始数据流和遥测参数,存储解析后供各种终端设备访问;载荷状态监视终端访问数据存储服务器中的载荷遥测参数和工程参数,提供载荷状态监视界面;科学数据判读终端访问数据存储服务器中的科学数据,提供科学数据判读软件并输出判读结果.
3 功能实现
3.1 控制中心
控制中心的主要功能是管理各种命令和配置参数、接收并显示各种测试状态以及日志管理等,需要提供相应的人机界面.Lab Windows/CVI(C programming language Virtual Instrument)平台[11]是美国NI(National Instruments)公司利用虚拟仪器技术开发的集成了ANSIC(American National Standards Institute C)的软件开发平台,面向计算机测控领域,提供了丰富的函数面板和库函数.我们开发了基于Lab Windows/CVI平台的控制中心用户界面,该界面支持测试过程中需要的命令发送按钮、文件获取接口和测试状态反馈显示等.
控制中心运行流程如图3所示,软件初始化完成后,开始接收并显示系统运行状态信息,对异常信息进行报警,提供日志管理功能,随后等待执行界面上各种操作.同时综测系统作为一个一体化的测试系统,控制中心定期向各个设备广播时间进行校时,保证所有设备在测试中有统一的时间.
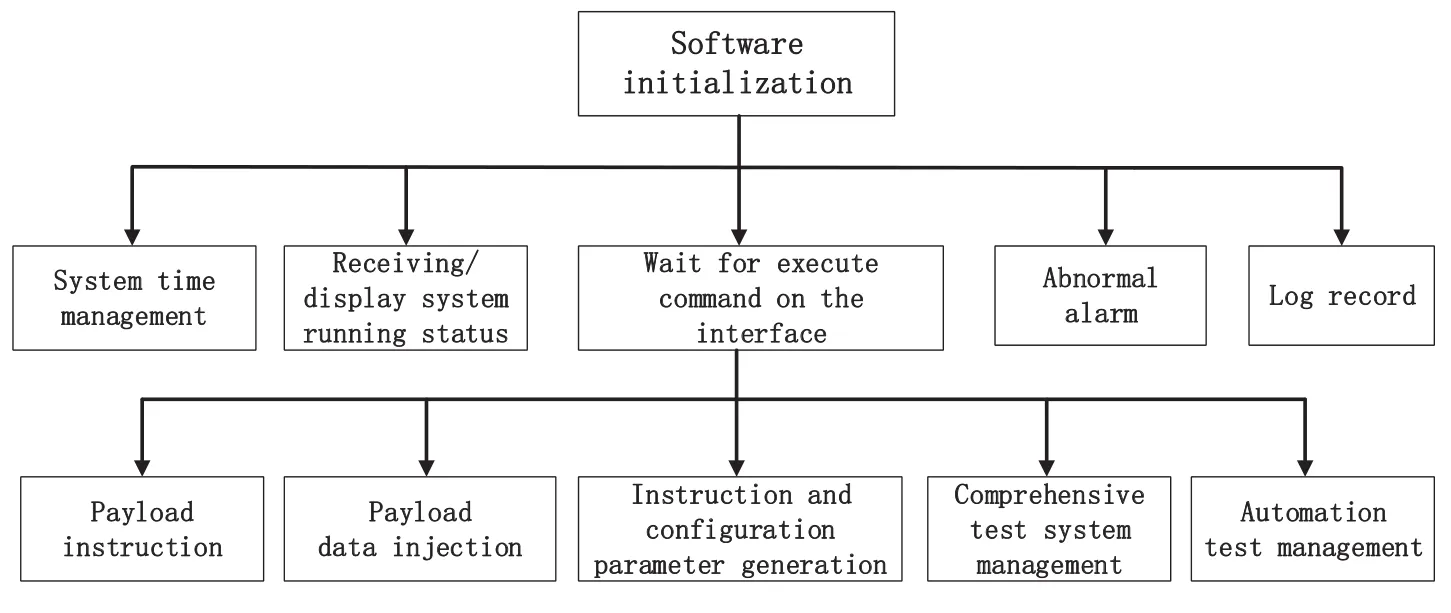
图3 控制中心工作流程Fig.3 Work flow of control center
用户界面提供了有效载荷遥控指令、数据注入文件的发送按钮,能够生成各种指令和载荷配置参数文件.控制中心作为综测系统管理中心,需要对其他测试设备的运行进行管理,包括设备的初始化管理、启动与停止数据接收等,这些功能通过在操作面板设定操作按钮实现.在有效载荷测试过程中对于模飞等测试用例,需要按照载荷在轨时的运行状态进行模拟测试,不同设备的开关机和指令的注入有时间要求,控制中心需要运行自动化的测试序列来保证模飞测试的真实性.首先根据测试细则中的相应用例编辑好自动化测试序列文件,其中包括要注入的指令包目录、不同指令包的注入时间和顺序等信息.测试序列管理模块读取该文件并执行相应动作,同时设置开始、暂停以及停止等功能并显示当前执行位置和状态.
3.2 载荷控制前端
载荷控制前端的功能包括:采集载荷遥测参数并发送给数据存储服务器、对有效载荷开关机的遥控指令控制、给有效载荷发送校时秒脉冲、实现1553B总线协议和总线监听功能、支持与控制中心之间的命令和状态交互.
根据需求,这里选取由NI公司的PXIe(PCI extensions for Instrumentation-Express)机箱加各种功能板卡的硬件结构来完成各种功能.机箱采用NI公司生产的PXIe-1062Q 8槽位机箱,支持PXI(PCI extensions for Instrumentation)和PXIe总线的板卡;遥控功能板卡采用凌华公司生产的CPCI(Compact Peripheral Component Interconnect)-7230;遥测和秒脉冲功能采用NI公司生产的PXIe-6363多功能DAQ(Data Acquisition)板卡;1553B总线控制器模拟器采用NI公司生产的4通道多功能板卡.载荷控制前端软件在Lab Windows/CVI平台下开发,用于控制各个硬件板卡.
载荷控制前端工作流程如图4所示,设备初始化完成后给控制中心上传初始化状态等信息,随后启动各项任务.具体步骤如下:启动定时器,发送符合占空比要求的秒脉冲;定时采集数管遥测参数上传给数据存储服务器;消息接收线程负责接收并解析控制中心发来的命令,如果是遥控指令则直接执行,如果是数据注入则将相应指令传递给1553B总线协议栈线程;1553B总线协议栈管理用来传递遥测参数、指令包和配置参数等信息的10个发送子地址、14个接收子地址以及5 bit的矢量字;1553B总线监听线程用于记录1553B总线上每一条消息,启动总线监听后开始数据获取,并对读取的数据解析分类.
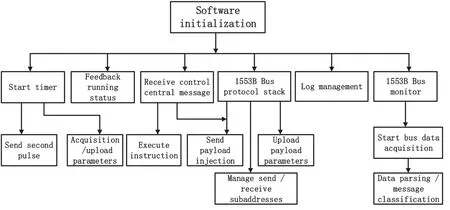
图4 载荷控制前端工作流程Fig.4 Work flow of payload control front-end device
3.3 数据接收与存储
数据接收与存储由数据接收前端和数据存储服务器共同完成.数据接收前端实时接收有效载荷LVDS链路过来的77Mbps原始二进制bit流并转发至数据存储服务器存储,bit流中包括有效载荷的科学数据和工程参数.为了满足接收过程中的高可靠性要求,数据接收前端选用配备PXIe 7965R高性能数据处理板卡的NI PXIe机箱.
控制中心的控制指令通过数据存储服务器转发给数据接收前端,数据接收前端接收到相应指令后开始接收来自载荷的数据,并经过网络发送给数据存储服务器进行存储,工作原理图如图5所示.
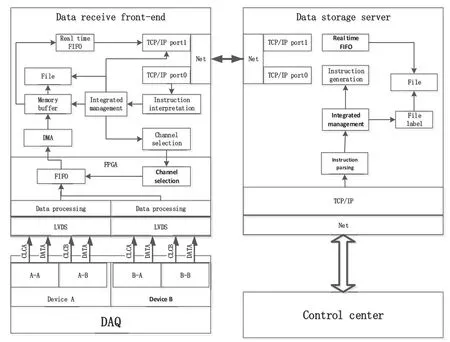
图5 数据接收前端工作原理框图Fig.5 Working principle diagram of the data receive front-end
控制指令包括如下4条:发送A通道数据、发送B通道数据、停止发送数据和校时.数据存储服务器接收到“校时”指令后,会将此时间码存储,作为最近接收到的数据时间标签,并将此时间码即时转发给数据接收前端,数据接收前端也把此时间码作为数据时间标签;数据存储服务器接收到“发送A/B通道数据”指令后,会开启数据接收通道等待接收数据,并立即将“发送A/B通道数据”指令发送给数据接收前端,数据接收前端调用FPGA(Field Programmable Gate Array)数据接收程序,接收载荷发送的数据后转发给数据存储服务器;一段时间后,当数据存储服务器接收到“停止发送”指令后,会先将“停止发送”指令发送给数据接收前端,并在等待2s后关闭数据接收通道,并按照最近接收到的时间码存储数据文件在本机上,数据接收前端接收到“停止发送”指令后,会立即停止发送数据,并关闭FPGA数据接收程序,并按照最近接收到的时间码存储数据文件在本机上.
数据存储服务器对原始二进制数据文件进行解析,根据虚拟信道标识符和应用过程标识符进行分包,可以对是否去扰、是否为RS(Reed-solomon)译码、是否校验科学数据、解析结果存储位置等进行配置.在数据包解析和分包过程中,如果发现错包将产生错误报告,可以具体定位错误包所在文件位置.程序的处理结果分为两种,一是不同等级的数据类文件,二是解包过程报告类文件.
3.4 有效载荷状态监视
测试过程中通过载荷的遥测参数和工程参数判断载荷的状态是一项重要任务,能够帮助在载荷发射前及时发现可能存在的问题.监视软件的功能包括两大部分:(1)遥测参数和工程参数的处理和存储;(2)支持参数的查询与显示.
根据功能需求将监视软件划分为3个部分:数据库、数据处理中心和监视终端,其中,数据库完成所有遥测参数、实时工程参数和回放工程参数的存储和查询功能;数据处理中心完成所有参数的接收解析和处理功能;监视终端完成所有参数的图形化、文件显示和与用户的交互功能.数据库基于MySql(my structure quest language)建立,数据处理中心和监视终端基于Java开发,可以跨平台部署.测试过程中需要多位测试人员同时对参数进行判读,因此监视软件采用C/S(Client/Server)架构,其中数据库和数据处理中心布置在数据存储服务器中,若干个监测终端分布在若干台终端机上,监视软件工作流程如图6所示.
对实时遥测参数测试时,数据处理中心接收载荷控制前端定时发送的载荷遥测参数源包,对源包实时解包解析处理得到遥测参数数据后,以时间码作为主键,存入数据库的相应表中.解析处理过程中对数据值超阈异常等情况进行判别,超阈异常信息也存入数据库相应表中.监测终端与数据库通过TCP/IP协议建立连接,同时对遥测参数相应表进行轮询,发现新数据后即获取到本地,对数据值通过图表等形式实时显示出来,超阈异常信息通过变色等方式报警.另外用户也可以通过终端访问数据库实现对历史遥测参数的查询.
对于工程参数,数据存储服务器对接收到的二进制原始传输帧文件进行解包后得到科学数据源包文件和工程参数源包文件,数据处理中心可通过手动或者定时自动的方式对工程参数源包进行解析处理,得到工程参数数据后,以时间码作为主键,存入数据库的相应表中,解析处理过程中对数据值超阈异常等情况进行判别,超阈异常信息也存入数据库相应表中.用户通过终端访问数据库实现对工程参数的查询.
遥测参数和工程参数数据涉及载荷多个分系统,种类多样,且数量达到数千个,频繁读取和长时间保存对于存储的数据库系统来说都会形成一定的负担.因此,为保证数据完整性以及测试稳定性,需要从数据库结构设计及存储备份策略上进行相应考虑.首先,数据库系统通过建立动态连接池,降低频繁读写的负载;其次,根据工程参数归属分系统和数据类型的不同,分别建立相应的数据表和索引,提高检索效率;最后,根据测试系统的运行特点,制定数据库备份策略,在每次综合测试结束后,及时对数据库数据进行整体备份和清理,如果测试时间持续较长,即通过数据库分表等操作,分散数据库运行压力.
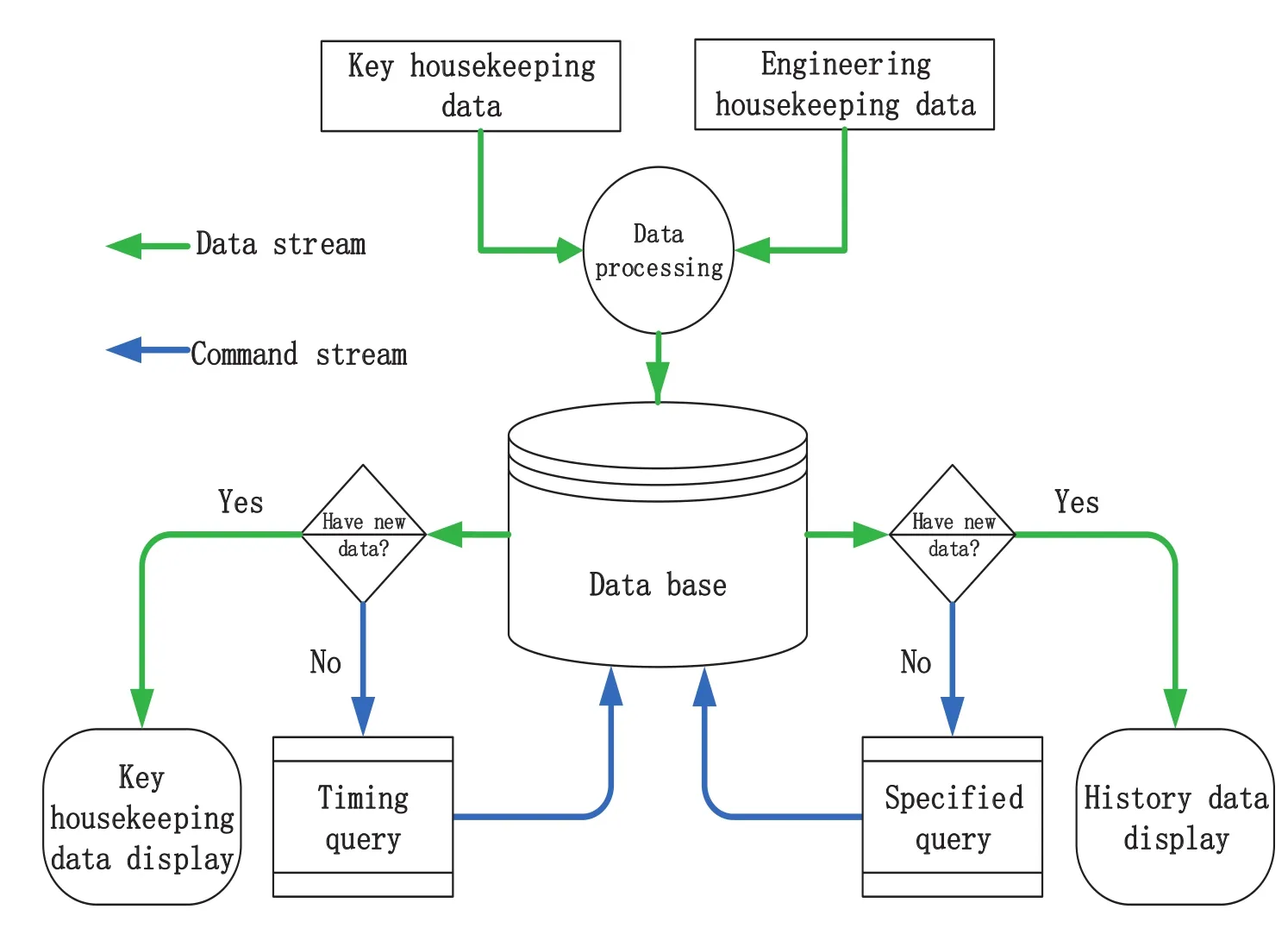
图6 载荷状态监视软件工作流程Fig.6 Work flow of the payload status monitor software
3.5 科学数据处理
有效载荷的地面测试除了验证有效载荷各分系统之间的各种接口、通讯协议以及分系统的软硬件功能,还要对探测器进行标定测试.在地面由于受到地球大气的遮挡,绝大部分的高能宇宙线粒子在地球大气中发生了簇射而无法到达地面.在簇射的产物中,只有穿透力较强的µ子才能到达地面.因此,暗物质粒子探测卫星的地面测试,主要是借助µ子对探测器进行标定和测试.测试中需要覆盖所有探测器,由于篇幅限制,在此仅以BGO量能器的一根晶体为例介绍一些基本的标定结果,其余探测器均相互独立且行为类似.
地面接收到的µ子在探测器中主要通过最小电离能损(MIPs)[12]沉积能量,用µ子测量的主要目的是测试探测器对带电粒子能量沉积测量的功能性,测试探测器从粒子损失能量产生荧光至电子学信号的读出以及重建整个物理事例的过程.µ子的MIPs事例在探测器单元中的能量沉积并不是高斯的形式,而是在高斯的高能端存在很长的尾巴.这一现象可以利用朗道卷积高斯函数来描述.µ子MIPs的能量沉积测量结果如图7所示,图中蓝点为试验测量的结果,红色线为朗道卷积高斯拟合的结果.
基线和噪声是探测器读出电子学性能的一项重要指标,它反映了电子学读出系统的稳定性.在地面测试中,基线和噪声的测试使用了电子学自带的周期性触发信号.在统计上,探测器读出电子学通道的信号满足高斯分布,高斯均值为通道的基线,标准差为通道的噪声.图8为典型的基线噪声的事例分布.从图中可以看出:电子学通道典型的噪声在7道ADC(Analog-to-Digital Converter)左右,远小于上图中MIPs事例几百道ADC的信号.
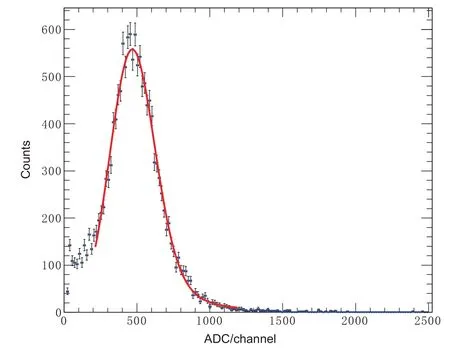
图7 BGO量能器第1层第10根晶体正端的MIPs能谱及朗道卷积高斯函数拟合.图中蓝点为MIPs信号的ADC读出,红线为拟合结果.Fig.7 MIPs energy spectrum and Landau convolution Gauss function fitting of the BGO first layer tenth bar positive end.Blue point is the ADC readout of MIPs,and red line means the fitting result.
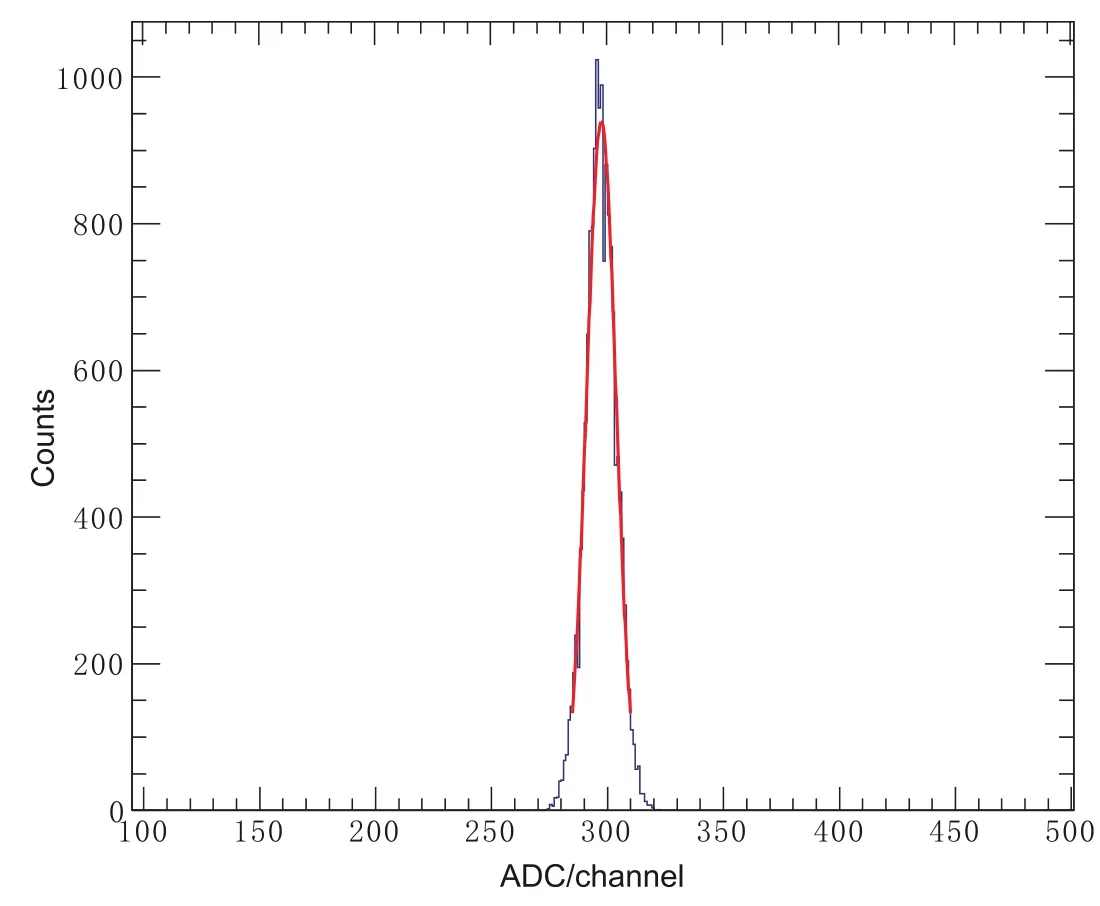
图8 BGO量能器第1层第10根晶体正端打拿极8的基线及高斯函数拟合.图中蓝线为基线的ADC读出,红线为拟合结果.Fig.8 Pedestal and Gauss function fitting of the BGO first layer tenth bar positive end Dynode 8.Blue point is the ADC readout of Pedestal,and red line means the fitting result.
探测器的前端读出电子学线性也是能量测量的一项重要性能指标,因此专门设计了电子学线性刻度电路,其主要功能是可以产生固定大小的信号,这些已知的信号与电子学读出信号的关系反映了电子学线性.测量结果如图9所示,从图中可以看出探测器具有很好的电子学线性的特点.
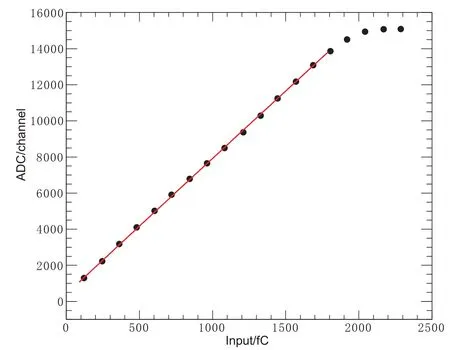
图9 BGO量能器第1层第10根晶体正端打拿极8的电子学线性刻度及拟合.图中黑点为特定电荷输入下的ADC输出,红线为拟合结果.Fig.9 Electronics linear calibration and fitting of the BGO first layer tenth bar positive end Dynode 8.The black point is the ADC output under the specific charge input,and red line means the fitting result.
4 总结
本文介绍了基于Lab Windows/CVI开发平台研制的暗物质粒子探测卫星有效载荷综合测试系统.该系统具有运行控制与管理、数据采集存储、载荷监视和数据分析等功能,有很高的自动化程度和可靠性,减轻了测试人员工作强度,满足了有效载荷测试的所有需求.暗物质粒子探测卫星有效载荷综合测试系统应用到了载荷研制的各个阶段,保障了载荷的顺利研制和交付,目前暗物质粒子探测卫星已经成功发射并在轨稳定运行.
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
遥测遥控(2022年1期)2022-02-11
军民两用技术与产品(2021年12期)2021-03-09
航天工业管理(2020年3期)2020-07-25
太空探索(2020年5期)2020-05-19
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
