电池管理系统SOC估算方法及应用
2018-08-23 01:24张礼宪周雨辉张景涛陶西孟杨继群
客车技术与研究 2018年4期
张礼宪,周雨辉,魏 涛,张景涛,陶西孟,杨继群
(中通客车控股股份有限公司,山东聊城 252000)
电池管理系统(BMS)对电动汽车的电池进行维护和管理,在保障安全性的前提下,尽可能地挖掘电池的潜能,提供更优的续驶里程和驾驶体验,是电动汽车研发的重点之一。电池荷电状态(SOC)的估算是BMS的核心功能之一,它是电动汽车电池充放电有效控制和动力性能优化管理的基础,直接影响电池的利用率和汽车的性能表现。由于SOC不能直接测量,且受众多因素的影响,所以对SOC估算方法的研究已成为电池管理系统的一项重要课题。
SOC指电池中剩余电荷的可用状态,一般用百分比表示。最常用的SOC定义为电池的剩余电量与其额定(标称)电量的百分比。在实际应用时,一般以实际最大电量代替额定(标称)电量,以考虑电池衰减、环境温度变化等因素的影响。
在电动汽车BMS行业,比较经典的SOC估算方法包括安时积分法、开路电压法以及Kalman滤波方法等,它们各有优劣。其中,安时积分法和Kalman滤波方法可以估算电池动态过程(电池充电或放电)的SOC,且估算过程中存在随时间变化的误差;开路电压法可以估算电池充分静置后,没有充放电时的SOC,且SOC的估算误差和静置时间没有关系,只与对应的SOC和电压测量误差有关。在实际应用时,往往是多种方法结合,以实现在电池系统的整个生命周期阶段都可以准确估算SOC,如在简单工况时使用安时积分法;在复杂工况时采用结合在线参数辨识的Kalman滤波方法;在OCV随SOC变化显著的区域,如果电池达到充分静置条件,再辅以开路电压校准。如此得到的SOC往往比单一方法估算的SOC更加准确。
1 安时积分法
安时积分法又称电荷累积法,是目前最常用的一种SOC估算方法[1-4]。安时积分法利用 SOC的定义,将当前的SOC写成SOC初始值与一段时间内累积流出电池的电量之差,公式如下:

式中:SOC0为SOC的初值;CN为电池容量;I为电池电流,这里约定放电电流为正,充电电流为负;η为库伦效率。
安时积分法公式简单,对于电流变化不大的工况精度较高,但是存在以下3个问题:
1)对初始值的依赖。由式(1)可以看出,如果SOC0不准确,将导致计算出的SOC一直不准确。
2)累积传感器误差。对于实际工况,电流的变化可能是剧烈的,受采样周期、采样精度的影响,电流积分值并不能完全反映真实电量的变化。这些误差又会累积到SOC中,导致对SOC的估算结果越来越差。为了消除累积传感器误差,可以在电池完全充满电或者放完电时,对累计误差进行校正,但是在电动车的实际使用过程中,这种校正条件不一定能时常达到。
3)库伦效率的影响。库伦效率η受电池温度、老化以及自放电等各种因素的影响,为了获得准确的库伦效率,需要进行大量的试验。
为了检验安时积分法的应用效果,我们使用BMS系统和德普BTS2000充放电柜对一个标称容量为60 Ah的电池包进行放电试验,放电电流为随机电流,每5 s变化一次,变化范围为0~30 A。在BMS系统中使用安时积分公式(1)对SOC进行估算,以充放电柜记录的SOC作为真实值,图1显示了SOC估算值与时间的关系。安时积分法估算,SOC有大约1.8%的初始误差(这里没有校准初始误差),安时积分过程中SOC的初始误差不收敛。并且由于电流值受测量误差及采样周期等因素的影响,安时积分法的估算误差呈累积放大趋势,估算末期的SOC误差超过4%。

图1 安时积分法估算结果
2 开路电压法
电池充分静置(既不充电也不放电,放置至少2 h以上)后,开路电压与SOC存在一一对应的关系。开路电压法的原理是:事先通过电池测试获取SOC与OCV的对应关系(如图2所示);然后在实际使用电池时,如果电池达到了充分静置的条件,通过测量此时电池的开路电压,再反查OCV-SOC表获取其SOC 值[5]。
开路电压法的优点是实现简单、计算量小,但存在以下几个缺陷:
1)滞回电压Vh的影响。受滞回电压Vh的影响,OCV与SOC并不是精确地一一对应。OCV实际上为,其中E是电池的平衡电动势,与SOC一一对应。利用开路电压法估算SOC时,忽略了滞回电压,认为VOC等于电池的电动势,这种近似会带来一定的误差。
2)静置时间过长。为了获得准确的开路电压,需要将电池充分静置,等待电池内部的化学反应达到平衡。为了得到稳定的电压,静置时间往往长达数小时,这显然不能满足实时估算的要求。
3)存在电压平台区。特别是对磷酸铁锂电池来说,OCV-SOC关系曲线在很大范围内(SOC∈[30%,90%])变化都非常平缓(如图2所示)。在这段范围,较小的OCV变化值对应较大的SOC变化。因此,平台区内OCV的测量误差会导致较大的SOC估算误差。试验使用BMS系统的电压测量精度是5 mV,对于图2中的磷酸铁锂电池曲线,如果测量出来的OCV比实际OCV偏大5 mV,这部分电压差导致的SOC误差如图3所示。可以看到,电压平台区的SOC估算误差甚至超过15%。
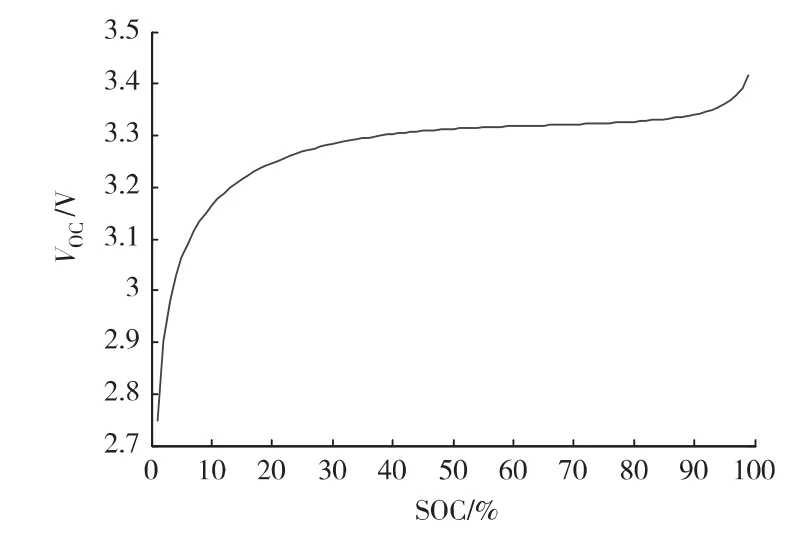
图2 磷酸铁锂电池的OCV-SOC关系曲线

图3 磷酸铁锂电池的SOC误差曲线(OCV偏大5 mV)
3 Kalman滤波法
对BMS的SOC估算问题来说,应用Kalman滤波算法,首先要建立等效电路模型[6-7]。等效电路模型的思路是用电容、电阻、电源等基本电路元器件的组合来模拟电池的动态特征。常用的等效电路模型有Rint模型、Thevenin模型、PNGV模型、Massimo Ceraolo 模型等[8-13]。
下面介绍一种较为常见的实施扩展Kalman滤波算法的思路。选用简化的Massimo Ceraolo模型,它包含1个电阻和2个RC网络,同时去掉寄生反应支路,即称为二阶RC模型,其电路结构如图4所示。这里用开路电压VOC近似代替平衡电动势E。
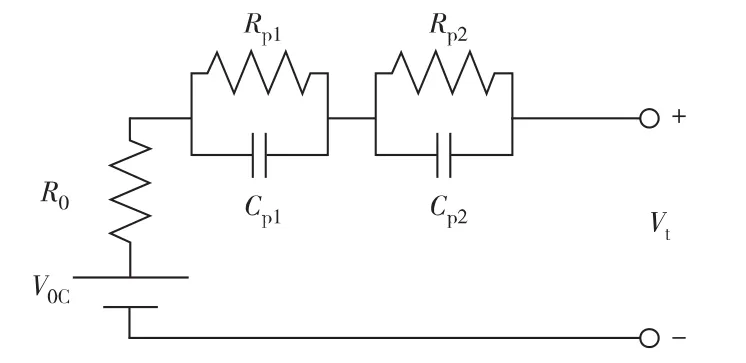
图4 二阶RC模型
约定充电电流为负,放电电流为正,该模型的状态方程如下:

量测方程如下:

式(2)和式(3)满足扩展形式的Kalman滤波公式,可以带入扩展Kalman滤波算法执行流程,SOC作为系统状态变量之一即可以被估算出来。
使用Kalman滤波算法对SOC进行估算时,SOC初始值的系统误差会在滤波过程收敛,另外传感器的随机测量误差也可以得到抑制。但是,Kalman滤波结果的好坏依赖于参数的选取,如果未能选择合适的参数,有可能会导致滤波发散。对于参数的选取,有离线辨识和在线辨识两种方法。离线参数辨识是指事先通过试验测试的手段,确定电池模型的参数,但是由于参数会受温度、电池衰减等因素的影响,测试结果很难将这些因素涵盖全面。在线参数辨识则是指在电池系统实际运行过程中,动态地对电池模型参数进行估算,但估算参数的精度可能会较低。
本文使用Kalman滤波法估算电池包的SOC,电池模型参数由离线辨识确定,测试工况同本文“安时积分法”小节,图5和图6分别显示了其SOC估算值及SOC估算误差与时间的关系。从图6可以看到,当滤波参数选取合适时,Kalman滤波法可以很快收敛,并且在整个周期内估算误差小于2%。

图5 Kalman滤波法估算结果
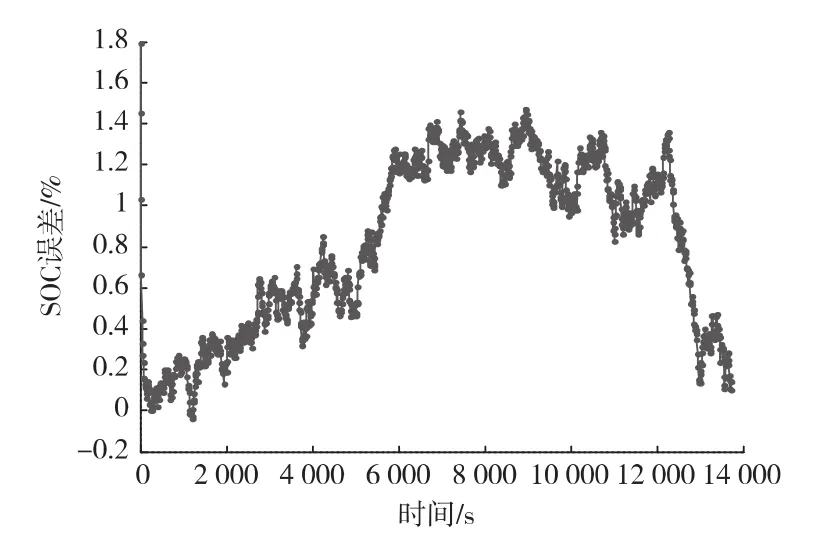
图6 Kalman滤波法估算误差
从上面的分析可知,安时积分法和开路电压法计算简单,但是受传感器精度影响较大,当BMS系统的传感器测量精度不高时,可能引起较大的SOC估算误差。Kalman滤波法可以抑制传感器的随机噪声,但是依赖于滤波参数的选取,如果参数选取不合适,可能导致滤波发散。
4 结束语
本文对目前电动汽车BMS上常用的SOC估算方法进行了综述,介绍了各方法的大致实施过程,并比较了各方法的优缺点。在实际使用时,往往是多种方法结合,综合其优势,以实现在电池系统的整个生命周期阶段,都可以得到准确的SOC估算。
修改稿日期:2018-02-25
猜你喜欢
建材发展导向(2021年7期)2021-07-16
煤气与热力(2021年4期)2021-06-09
汽车工程师(2020年10期)2020-11-03
科教新报(2020年23期)2020-07-21
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
科技视界(2018年3期)2018-04-02
科学生活(2016年10期)2016-11-02
科技视界(2016年8期)2016-04-05
中国美容医学(2016年1期)2016-03-17