
基于CTL模型和任务绩效的驾驶舱动态功能分配方法*
2018-08-22 02:53汤志荔汤传乐
火力与指挥控制 2018年7期
张 安 ,任 卫 ,汤志荔 ,汤传乐
(1.西北工业大学航空学院,西安 710072;2.西北工业大学电子信息学院,西安 711029)
0 引言
随着飞机驾驶舱自动化程度的不断提高,飞行员与自动化子系统间的人机交互日趋频繁。为了提高飞行效率、减小飞行员的脑力负荷,科学合理的人机功能分配(即将飞行任务分配给飞行员或自动化子系统)在飞机设计过程中显得尤为重要。
人机功能分配的方法有静态和动态两种。其中,静态功能分配(Static Function Allocation,SFA)方法是从功能特性和需求分析入手,通过比较飞行员和自动化子系统在完成该功能上的能力优势或绩效优劣,决定该功能分配给飞行员还是自动化子系统。动态功能分配(Dynamic Function Allocation,DFA)方法允许系统在运行阶段根据情况的变化将功能在飞行员与自动化子系统之间动态地重新分配,从而使人机工作更加协调,提高系统的工作效率[1]。
国内关于飞机驾驶舱动态功能分配的文献较少,仅有空军工程大学、国防科学技术大学和北京航空航天大学的几个研究组在本领域有所研究。空军工程大学的柳平等人在文献[2]中初步建立了人机功能分配的流程图,并引入多目标模糊决策方法实现基本单元任务的分配。国防科学技术大学的王阔天等人在文献[3]中结合具体的多无人机任务背景,提出一种基于操作员工作量的触发方法,并对该方法的可行性进行了验证。北京航空航天大学的卫宗敏等人在文献[4]中建立了基于飞机驾驶舱显示界面的脑力负荷预测模型,并通过飞行模拟实验进行了验证。
飞机驾驶舱动态功能分配的触发机制是指根据什么信息来触发自动化等级的自动调整,它是飞机驾驶舱动态功能分配实现的关键。美国乔治梅森大学的Raja Parasuraman等人在文献[5]中将动态功能分配的触发机制总结为以下3种:1)基于紧急事件——特殊事件引发功能分配;2)基于飞行员工作负荷的测量——通过测量飞行员对既定任务的表现(即任务绩效)或者生理指标如心率、脑电图信号等估算飞行员当前工作负荷,并将工作负荷的测量结果作为功能分配的决策量;3)基于飞行员性能模型——根据建立的飞行员性能模型指导动态功能分配。上述分配方法均为单一触发机制,为了弥补单一触发机制的不足,提高分配的精确度,英国法恩伯勒人类科学中心的Catherine Cook等人在文献[6]中提出一种包含多种触发信息的综合触发机制。荷兰乌得勒支大学的Tinka R.A.Giele在文献[7]中提出认知任务负荷(CTL)的概念模型,但并未给出具体量化过程。
本文在此基础上,给出了CTL模型的具体计算公式,使用该模型估算脑力负荷,并将其与飞行任务绩效测量相结合,提出一种基于CTL模型和任务绩效测量的驾驶舱动态功能分配方法。该方法为飞机设计阶段的驾驶舱动态功能分配设计提供合理准确的方案,能够提高飞机驾驶舱自动化水平和人机交互水平。
1 驾驶舱动态功能分配理论
1.1 任务需求负载
在功能分析阶段,通过对飞行任务进行分析,得到功能序列。用任务需求负载(Task Demand Load,TDL)来描述飞行任务对整个人机系统的负载作用[8]。每一个驾驶舱功能实现都有其相应的TDL,进而每一个功能序列都对应一个TDL序列,这个TDL序列作为整个驾驶舱系统输入,触发了驾驶舱系统内的工作负荷流。TDL通常是任务内容的复杂度及其执行紧迫程度的函数,并通过不同的影响途径作用于飞行员,最终通过飞行员的脑力负荷(Mental Load,ML)表现出来。
当不考虑飞行员自身与飞行任务无关的影响因素时,TDL对飞行员状态的影响如图1所示。
因为飞行任务由飞行员和自动化子系统协作完成,并且功能序列按照功能分配方案可以分解为飞行员操作序列和自动化操作序列,所以TDL输入系统后,首先要分解为自动化任务需求负荷(Automation TDL,ATDL)和飞行员任务需求负荷(Crew TDL,CTDL)。只有CTDL真正作用于飞行员并产生飞行员的ML。由于TDL可以用任务内容和执行环境等参数定量表示,作为TDL一部分的CTDL在很大程度上也是可以用包含飞行员操作序列参数的数学模型来进行精确描述。因此,可以通过实时计算CTDL来估计飞行员当前的脑力负荷情况。
1.2 驾驶舱功能分配基本流程
静态功能分配和动态功能分配并不是相互独立的,它们互为补充。包含这两种分配形式的驾驶舱功能分配基本流程如下页图2所示。
驾驶舱系统首先进行静态功能分配,它的主要内容是结合功能需求和特性,对飞行员和自动化子系统的机能特征进行比较,分析人机优势相对于功能的匹配度,初步确定功能的自动化等级(Levels of Automation,LOA)。静态功能分配之后,首先判断是否有必要进行动态功能分配,若有必要,则进行动态功能分配;否则,直接对功能分配结果进行综合评价,进而得到最终的分配方案。
当静态功能分配的结果是将该功能分配给飞行员或自动化子系统,则一般不考虑动态功能分配;如果静态功能分配倾向于将该功能分配给飞行员完成,则要考虑飞行员是否在某些情况下需要自动化的辅助;如果静态功能分配倾向于将该功能分配给自动化子系统完成,则要考虑自动化子系统是否在某些情况下需要飞行员的介入。在后两种情况下,如果考虑的结论是“需要”,则认为需要进行动态功能分配。
相比于静态功能分配,动态功能分配的结果不是单独的自动化等级,而是自动化等级的调整方案。

图2 驾驶舱功能分配基本流程
2 基于CTL模型和任务绩效测量的飞机驾驶舱动态功能分配
通过分析上述驾驶舱功能分配基本流程可知,在飞行过程中,驾驶舱动态功能分配实现的关键在于如何通过推理得到相应的触发信息。本文通过认知任务负荷(CTL)模型来实时估算当前飞行员执行任务的脑力负荷,并综合飞行员任务绩效(Task Performance,TP)的测量值作为动态功能分配的触发机制。
2.1 CTL模型
CTL模型通过计算某段时间区间内操作员操作序列的占用时间(TO,Time Occupied)、信息处理等级(LIP,Level of Information Process)和任务集切换(TSS,Task Set Switching)3个参数来估计操作员的脑力负荷,其结构如图3所示。其中,TO表示操作员执行任务所用的时间占全部时间的比例,它表示操作员的忙碌程度;LIP指操作员完成任务需要的认知处理类型,它代表操作员对认知资源的需求大小;TSS表示在相应的时间段内任务切换的次数,它用于表征操作员在任务切换时需要的时间和注意力转换程度。

图3 CTL模型
立方体的长、宽、高分别代表TO、TSS和LIP的取值区间。立方体被分割为若干个子块,每个子块占据的空间代表操作员处在某一种脑力状态。
2.2 CTL模型的公式化
对于每一飞行员操作o来说,具有如下属性:
1)操作的信息处理类型l。采用SRK模型对其进行量化。当该操作属于基于经验的行为,l=1;当该操作属于基于规则的行为,l=2;当该操作属于基于知识的行为,l=3。
2)操作时间范围d。操作时间等于操作的结束时刻end T与起始时刻start T的差值。
3)操作的注意力需求比例a。表示飞行员在操作过程中注意力的需求比例,取值范围为0~1。
4)信息域I。信息域是由能够代表操作内容的文字短语组成的集合。操作内容可以包含操作涉及的主要情境信息、操作的行为和操作时注意力集中的人机接口。
假设当前时刻为t,时间窗口选择为当前时刻前的 f秒,即区间(t-f,t)。设在这 f秒内,飞行员操作序列为 Of={o1,o2,…,on}。操作 oi属性集为 <li,ai,di,Ii>,li,ai,di,Ii分别表示 oi的信息处理类型,注意力占据比例,操作时间范围,信息域。此时,LIP、TO和TSS的计算公式分别为:
2.2.1 信息处理类型LIP
LIP给出了f秒内飞行员从事脑力活动的类型,它等于时间窗口内所有操作的信息处理类型的平均值:

2.2.2 占据时间TO
TO等于飞行员进行操作时间占整个时间窗口长度的比例。TO的取值范围为0到1,0代表完全空闲,1代表完全忙碌。它的计算公式如下:

2.2.3 任务集切换次数TSS
TSS描述了飞行员的注意力从一个操作转移到另外一个操作时产生的工作负荷。它的计算与操作集合中两个相邻操作间的信息域有关。信息域中的元素能够体现操作间的相关性,在两个相关的操作之间进行切换相较于在两个无关的操作之间进行切换会产生更少的额外的需求负荷。两个操作信息域中的相同元素越多,则它们之间的相关性越强,反之越弱。具体的计算公式如下:

2.3 CTL模型估算脑力负荷
将LIP、TO、TSS 3个参数的取值范围进行规范化变形转化到[0,1]区间,则CTL 3个参数的联合取值都将落在边长为1的立方体内部空间。具体规范化公式如下:
如图4所示,在时刻t计算得到的参数值用立方体空间中的坐标点S表示。当CTL 3个参数都比较小时,飞行员的脑力负荷也非常低;当CTL 3个参数都非常大时,飞行员的脑力负荷都非常大。其图形意义是,S与原点O之间的距离disO越大时,飞行员脑力负荷值越大。disO的计算公式如下:

另外,由于每一个参数都独立于其他两个参数,单一参数对于飞行员脑力负荷的影响也是有限的。其图形意义是,当disO相同时,到线段AO的距离相对较小的坐标点所反映的飞行员脑力负荷相对较大。由几何关系知:
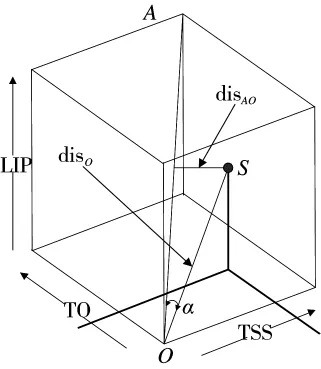
图4 飞行员脑力负荷计算示意图

所以,飞行员脑力负荷用disO、disAO表示为:

2.4 任务绩效测量
飞机驾驶舱是一个多任务环境,每一种任务具有各自不同的认知特性,将飞行任务绩效及时地反馈给系统可以更好地优化自动化子系统,进而减轻飞行员的脑力负荷。典型的飞机驾驶舱任务有:资源管理(Resource Management,RESMAN)、系统监控(System Monitor,SYSMON) 和通信(Communication,COMM)。
2.4.1 任务绩效测量平台
应用GL Studio 3.2虚拟人机界面仿真软件开发的任务绩效测量图形用户界面如图5所示[9]。其中,人机界面的右半部分是资源管理模块,显示了一个模拟的燃油输油网络;人机界面的左上部分是系统监控模块,分别显示了左右两个发动机的N1转子转速和排气温度;人机界面的左下部分是通信模块,用以显示载机无线电类型标识、无线电频率等信息。
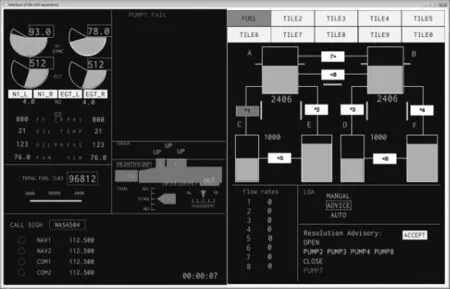
图5 飞行任务模块图形用户界面
2.4.2 任务绩效测量指标
飞行过程中需要测量的指标包括:资源管理任务表现指数、系统监控任务表现指数、通信任务表现指数。
1)资源管理任务表现。资源管理任务表现的好坏由油箱A、B中油量偏离目标值的程度决定。设一次试验采集N组A、B油箱油量分别表示第i组A、B油箱油量偏差值。则资源管理任务表现指数的计算公式为:

2)系统监控任务表现。系统监控任务表现体现在对发动机异常状态的处理上。设一次试验发生Ns1次发动机异常状态事件,其中观察对象在规定时间内正确判断出发动机异常状态来源的次数为ns1次表示第i次完成该任务所需的时间。则系统监控任务表现指数的计算公式为:

3)通信任务表现。设一次试验发生Ns2次语音信号收听事件,其中语音信号的呼号与被试者的呼号一致和不一致的次数分别为Ns2-Ns2'次和Ns2'次。对于语音信号的呼号与被试者的呼号不一致的情况,观察对象在规定时间5 s内正确完成任务次数为ns2'次。对于语音信号的呼号与被试者的呼号一致的情况,观察对象在规定时间内正确完成任务次数为ns2次,K为0到1之间的常数。则通信任务表现指数的计算公式为:

所以,任务绩效测量结果为:

式中,ki(i=1,2,3)为各指标权重。
2.5 综合触发机制的实现方案
综上所述,将使用CTL模型估计得到的飞行员脑力负荷ML和飞行员任务绩效的测量值TP作为输入,自动化子系统的自动化等级作为输出,经过模糊推理,实现自动化等级的动态调整,具体实现过程如图6所示。
3 试验验证
为了验证使用CTL模型和任务绩效测量来触发驾驶舱动态功能分配方法的有效性,本文使用西北工业大学的飞机驾驶舱DFA试验平台,采用人在回路的试验方法,通过测量相应的评估指标,并对测量结果进行对比分析进而验证该方法的有效性。

图6 基于CTL模型和任务绩效测量的飞机驾驶舱动态功能分配实现方案
3.1 试验内容
试验分别采用静态功能分配方法和本文提出的动态功能分配方法对人机功能进行分配。其中,静态功能分配方案有手动模式、建议模式和自动模式 3 种,分别用 Manual、Advisory、Auto表示。动态功能分配方案包括可适应和自适应两种,分别用Adaptable、Adaptive表示。其中,可适应动态功能分配方案是指被试者手动切换资源管理任务(图5中“LOA”区域)的控制模式;自适应动态功能分配方案是指系统自动切换资源管理任务的控制模式,该方案不允许被试者手动更改控制模式。
试验所采用的任务事件想定如图7所示,试验任务的持续时间为5 min,共包含有43个任务事件。为了模拟变化的飞行任务,任务事件在整个时间轴上分布并不均匀。

图7 任务事件想定
3.2 评估指标
脑力负荷程度和情景意识水平是试验评估的重要指标,分别用IML和ISA表示。其中,被试者的脑力负荷选用NASA-TLX量表法进行评估[10];情景意识是指在一定时间和空间范围内持续提取环境信息以达到对环境的感知和理解,并在此基础上预测环境未来的状态,本文采用SAGAT法对其进行评估[11]。
3.3 试验结果与分析
试验过程中,试验平台的记录和评估模块将自动记录被试者完成任务的相关数据,并分别保存在4个文本文件中。根据数据记录文件计算得到所有评估指标的评估值,计算得到各个指标的平均值。将各评估指标的最大值、最小值和平均值以柱状图的形式显示如图8所示。

图8 试验结果
图8(a)给出了不同分配方案对被试者脑力负荷影响的试验结果。对试验结果进行F检验,判断其总体方差是否相等,可以发现人机功能分配方案对被试者的脑力负荷有显著影响,F=116.05>F0.01(4,55)。对于静态功能方案,随着自动化等级的提高,被试者的脑力负荷逐渐减小,被试者在Manual方案下脑力负荷最大(IML平均值M=0.682 8),在Auto方案下脑力负荷最小(M=0.321 7),Advisory方案介于中间(M=0.579 0)。两种动态功能分配方案下的脑力负荷(Adaptable方案下M=0.298 8,Adaptive方案下M=0.301 4)与Auto方案下的脑力负荷大小相当,但是它们之间并无显著差异,t=0.090 7<t0.005(22)。
图8(b)是不同分配方案对情景意识水平影响的试验结果。对试验结果进行F检验,判断其总体方差是否相等,可以发现人机功能分配方案对被试者的情景意识有显著影响,F=13.02>F0.01(4,55)。被试者在Auto方案下情景意识最小(ISA平均值M=0.783 3)。在其他功能分配方案下,被试者的情景意识都接近最佳状态(Manual方案下M=0.966 7,Advisory方案下 M=1,Adaptable方案下 M=0.983 3,Adaptive方案下M=0.950 0)。两种动态功能分配方案并无显著差异,t=0.842 4<t0.005(22)。
由上述分析可知:在动态变化的任务环境下,静态功能分配条件下被试者的脑力负荷普遍偏高,情景意识水平波动较大;而动态功能分配在使脑力负荷保持在正常范围内的同时,仍能维持被试者较高的情景意识水平。该试验表明:使用本文提出的动态功能分配方法能更好地平衡操作员的脑力负荷,提高情景感知水平,最终提高任务绩效。
4 结论
本文通过对飞机驾驶舱动态分配理论进行研究,提出了一种基于CTL模型和任务绩效测量的驾驶舱动态功能分配方法。并通过试验验证了该方法在飞机驾驶舱动态功能分配应用中的有效性。
猜你喜欢
汽车零部件(2020年9期)2020-09-28
共产党员(辽宁)(2019年7期)2019-11-18
共产党员·上(2019年4期)2019-04-26
时代英语·高一(2018年4期)2018-09-14
小天使·一年级语数英综合(2018年1期)2018-06-22
环球时报(2017-08-18)2017-08-18
时代英语·高一(2016年4期)2016-09-21
奥秘(2016年3期)2016-03-23
小猕猴学习画刊(2015年4期)2015-05-05
小猕猴学习画刊(2015年3期)2015-04-07
