
一种基于全方位底盘的小型侦查平台设计*
2018-08-22 02:53张豫南杨怀彬尚颖辉
火力与指挥控制 2018年7期
张豫南,杨怀彬,尚颖辉,张 骞,黄 涛
(1.陆军装甲兵学院,北京 100072;2.解放军63983部队,江苏 无锡 214035)
0 引言
在现代战争中,准确、快速的战场信息侦查能够有效地提高部队作战效能、降低我方伤亡,尤其是在战场环境危险性较高的情况下。小型地面无人侦察平台具有机动性强、携带方便、易于操控等优点,同时还可搭载小型武器平台构成察打一体综合平台[1]。其中,Gladiator系列、PackBot系列都属于该类型平台,技术较为成熟且已经服役。国内的沈阳自动化研究所、南京理工大学、北方车辆研究所等单位也针对此类平台进行了相关研究。
目前,小型地面无人平台的运动机构主要分为轮式、履带式和轮履复合式3种[2-3]。轮式平台机动性强但越野性能较弱,履带式平台越野性能较好但机动性欠缺,轮履复合式平台兼具了机动性和越野性,但结构往往较为复杂。全方位运动平台具有良好的机动性,可实现全向运动,但大多数以轮式为主,越野能力较弱,适于在平坦硬路面使用[4-5]。全方位履带以传统履带机构为基础,结合麦克纳姆轮全方位运动技术设计而来[6]。本文基于全方位履带结构,利用纵向对称布局形式研制一种小型全方位底盘。在该底盘上加装摄像头、GPS定位器、远距离传输电台等侦查设备,搭建成一种小型侦查平台,并进行了相关试验。
1 全方位底盘布局分析
全方位履带与传统履带结构基本相同,具有驱动轮、负重轮、托带轮、履带板等结构。但其在履带板上加装了可自由旋转的辊轮,使其在平面上具有两个运动自由度。文献[7]中分析了全方位履带与平台之间的运动学关系,得到其逆运动学方程为:

其中,(vyvxωz)为平台运动速度,(ωivri)为履带驱动轮角速度和辊轮运动速度,li为履带中心点到平台中心点的距离,αi为辊轮偏置角,r为驱动轮半径。
观察式(1)可以发现,J为平台逆运动学方程的雅克比矩阵。根据平台全方位运动特性,J必须满足条件 rank(J)≥3[8-10]。因此,由全方位履带构成的全方位底盘至少需要3条履带。考虑到履带生产安装、驱动控制等因素,全方位底盘履带布局有如下几种形式,如图1所示。

图1 全方位底盘履带布局形式
图1中,图1(a)为三履带布局形式,图1(b)~图1(d)为四履带布局形式,图1(e)~ 图1(g)为多履带布局形式。每种底盘通过多履带独立驱动均可实现全方位运动性能,但考虑到侦查平台运行环境较为复杂,多以障碍路面为主。因此,底盘布局形式选择与传统履带车辆类似的纵向对称布局形式,如图1(d)所示。
2 平台方案设计
2.1 平台总体方案
平台总体方案如下页图2所示。48 V动力电池组为全方位底盘提供动力,同时也为综合控制器、摄像头、电台等设备供电。驱动部分由全方位履带及其悬架装置、电机及其减速器和驱动器组成。侦查系统由前后摄像头、云台摄像头和GPS定位器组成。云台摄像头在水平方向上能够360°旋转,在垂直方向上能够-15°~90°旋转,具备自动调焦功能。前后摄像头安装在底盘上,对底盘前后的近距离位置进行观察。图像信息由电台实时回传给终端控制箱,用于观察记录和实时操作。GPS定位器能够对侦查目标的地理位置数据进行精确记录。综合控制器与驱动器之间采用CAN总线模式进行通讯,下发控制数据指令和回采电机状态信息。同时,综合控制器也对摄像头等实施控制操作。终端控制箱主要通过摄像头实时回传的图像信息实现对底盘的操作控制和侦查环境的记录。平台采用大功率电台进行图像和数据的传输,确保远距离情况下控制和传输正常。

图2 平台总体方案
综合控制器是底盘部分的核心,负责对整个平台进行数据处理,并实时控制,控制流程如图3所示。控制器初始化完成后,对摄像头、电台、电机等平台部件进行状态检测,若完成则将串口打开等待终端控制箱发送的握手信号;若未完成则进入停机报警模块,提示操作者平台启动失败。等待电台握手数据的最长时限为10 s,超时则进入停机报警模块,提示操作者数据连接失败。若接收到电台握手数据,验证正确后则进行数据回传,通讯连接成功。接收控制数据,对数据进行匹配处理,若成功则进行数据的解析计算,并将结果下发到驱动器,同时回采电机状态信息;若匹配失败则直接给驱动器发送速度为0的指令同时回采电机状态信息。电机状态正常则继续等待接收控制数据,进行循环;若电机状态异常,则进入停机报警模块。
根据侦查平台的性能要求,设计平台主要性能指标参数如表1所示。

图3 综合控制器控制流程

表1 平台主要指标参数
2.2 电驱动方案
底盘要实现全方位运动,需要分别控制4条履带来实现不同速度,因此,每条履带需要独立驱动来完成。传统的机械传动实现这一功能较为复杂,因此,底盘采用多履带独立电驱动技术来实现。电驱动系统主要包括电机及其减速器、驱动器、电池等部分。其中,电机选择性能较好、应用成熟的直流无刷电机,采用速度控制模式。根据表1中侦查平台主要指标参数为依据,对电驱动系统各部分进行匹配计算。
电机的持续输出功率按照底盘最大速度来计算。平台满载质量m=200 kg;电机输出效率取0.8,履带运行效率取0.9,则电机到地面的输出效率η=0.8×0.9=0.72;阻力系数 f=0.05;电机数为 4。则忽略风阻情况下,电机的持续输出功率为

电机的最大输出功率按照底盘最大爬坡度来计算。底盘最大爬坡角度为α=25°,爬坡速度取v=4 km/h,则电机的最大功率为:

综上,考虑到留有一定裕量,选取电机参数如下:功率400 W,最高转速 4 000 rpm,额定扭矩1.2 Nm。
减速器减速比的选择按照电机最高转速与最大输出扭矩来计算。减速比的上限由电机最高转速和底盘最大速度决定:

减速比的下限由电机的最大输出转矩和最大爬坡对应的行驶阻力决定。电机按过载2倍计算,Tmax=1.2×2=2.4 Nm,可得

因此,选择减速比为:i=10。
2.3 履带方案
本文设计的全方位履带如图4所示,其与传统履带类似,具有驱动轮、负重轮、履带板等结构。不同的是在履带板上安装有可自由滚动的辊轮,根据其对底盘全方位运动特性的影响规律,将偏置角选取为该角度能够确保底盘在实现全方位运动的基础上,在纵向上具有更好的速度和加速度性能,便于纵向越野行驶。履带板之间采用链条相互连接,驱动轮采用配套的链轮。悬架装置选用3个小型弹簧减震器,由于履带较短没有设计相应的托带轮。为了下一步进行扩展研究,将整个车体做成分体式,中间通过铰链进行连接,使用时根据需要将其固定或解锁。
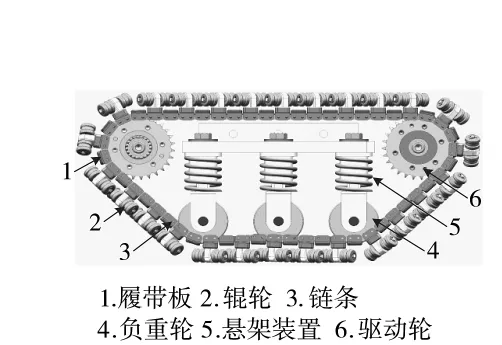
图4 全方位履带结构图
3 样车与试验
根据平台总体方案,研制了原理样机,样机由终端控制箱通过图传数传系统进行远程控制,如图5所示。

图5 原理样机及终端控制箱
平台各项性能调试完毕后,分别进行了中心转向、横向移动、草地、跨越台阶、野外远距离遥控等多种复杂环境下的实地试验,如下页图6所示。通过试验发现,该平台能够实现全方位运动,同时具备一定的越野能力,能够在草地、土路、障碍等各类复杂环境下进行侦查活动。实验过程中发现野外环境下平台的全方位性能会受到影响,同时辊轮容易磨损且有掉落现象,在跨越一些较高的障碍物时两履带中间会出现“卡顿”现象,造成履带不能完全接地。
4 结论
本文依据全方位履带,按照纵向对称布局形式,研制了一种基于全方位底盘的小型侦察平台,并对平台总体方案、电驱动方案和履带方案进行设计,最后对平台进行了综合性能试验。试验结果表明,该平台具备全方位运动性能,且具备一定的越野能力。但平台在结构上还需要进一步改进,在重量、体积等方面需要进行进一步优化。目前,该平台只具备侦查能力,下一步工作中需要配备相应的武器平台和自主控制模块,使其具备自主侦查打击能力,功能更加丰富。

图6 平台综合试验
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
纺织科学研究(2021年6期)2021-07-15
兵器装备工程学报(2021年3期)2021-04-09
创新作文(1-2年级)(2017年11期)2018-04-17
专用汽车(2016年4期)2016-03-01
IT时代周刊(2015年7期)2015-11-11
中国医用工程与装备(2015年7期)2015-08-12
领导文萃(2015年4期)2015-02-28
人民交通(2009年2期)2009-03-04
坦克装甲车辆(2000年6期)2000-06-13
