
基于手势控制的智能车设计
2018-08-21 20:45唐培智
科技传播 2018年15期
唐培智
摘 要 随着科学技术的发展进步,玩具也变的更加的智能化。基于此,本设计设计了一种新型的基于手势控制的智能车模型来用于满足人们的需求。该款智能车分为控制手套与智能车本体两个本部分。其中控制手套由陀螺仪、单片机与蓝牙发送模块3个部分组成,其中陀螺仪用于检测手势信息,单片机负责接收、转换以及发送陀螺仪的信息,蓝牙发送模块则用于发送单片机的信息。而智能车本体包含单片机、蓝牙接收模块以及电机驱动三部分组成,其中电机驱动接收单片机的命令,驱动两个车轮,以完成智能车的运动、转弯等动作。通过不断的论证,本设计是可行的,可以完成预定的目标。
关键词 手势控制;单片机;陀螺仪
中图分类号 G2 文献标识码 A 文章编号 1674-6708(2018)216-0121-02
目前的玩具产品已经变得越来越受欢迎,并且范围也不仅仅局限于儿童。并且玩具所包含的科技元素也越来越多,这也都得益于科技的发展。而在玩具方面,玩具车是最受大众欢迎的玩具之一。而且玩具车的种类很多,比如无动力的玩具车,电动类的玩具车以及借助发条或者惯性的玩具车。这其中,电动类的玩具车最受各类人群的欢迎,甚至已经出现了专门用于竞技的赛车。在电动玩具车领域内,遥控车又是其中很重要的一个组成部分。目前市面上的遥控车大多都是利用手持的遥控器来完成,这在一定程度上影响到了控制时真实性的体验。为了更进一步的完善玩具的功能与控制方式,使得玩具持有者具有更佳的体验,设计一款新型控制方式的智能车就显得非常重要。有鉴于现在人工智能技术的飞速发展,本设计拟采用手势识别的方式来简单的控制智能车,以此达到更好的控制体验效果。
1 总体设计
本设计制作的是一款智能车,采用的方式是基于手势控制的方法。具体实施的方式是通过识别手掌的下压、上抬、左偏以及右偏来控制完成智能车的运动、转弯等动作。为此,该设计要解决的问题主要有以下几个方面:
1)手势动作的识别问题。
2)手势动作信息的传递问题。
3)手势动作信息的接收问题。
4)智能车的运动控制问题。
本设计所有的动作都是自动完成的,不再需要人为过多的参与,本设计的核心是关于智能车的控制,在控制领域,单片机由于在体积、功耗以及效能方面的巨大优势无疑是一个非常好的选择,因此本设计采用单片机控制的方法。而在手势动作的识别问题方面,如若直接通过影像识别,牵扯的技术将会非常复杂,为了简化难度以及成本,本设计制作了专门的手套,以此来作为识别以及传递手势信息的手段。在手套的手掌部位安装有陀螺仪、单片机以及蓝牙模块。其中陀螺仪用于检测手势动作信息,单片机作为系统的核心,负责陀螺仪信息的接收以及控制蓝牙模块发送信息。为了进一步简化车体,本设计不再采用舵机,而是采用差速转弯的方法。智能车内置有蓝牙接收装置、单片机以及传动装置。其中蓝牙接收装置负责接收手套发送的信息,单片机负责信息的接收转换以及命令的发送,传动装置则负责整个车体的运动。手套以及车体的整体结构图见图1、图2。
2 硬件设计
单片机:单片机是该系统的控制核心,其在控制领域是非常重要的存在。并且单片机在家用电器、网络通信、设备领域以及航空航天领域等等方面都发挥着关键的作用。由于其体积、功耗、功能等方面的巨大优势,非常适合本设计。
陀螺仪:陀螺仪传感器是一个简单易用的基于自由空间移动和手势的定位和控制系统,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。利用陀螺仪指示方向,就可以对轴所指的方向进行读取与传输,现代陀螺仪精确度很高,这在现代的航空、航天、航海以及国防工业的惯性制导方面应用非常广泛。经过多年的发展,现代的陀螺仪结构紧凑,灵敏度高,并且工作更加可靠,体积也更加趋向于小型化。本设计的智能车需要完成在平面上的运动以及转弯,因此对于本设计中陀螺仪的选取,至少能够绕2个轴进行旋转,即至少为二自由度陀螺仪。基于此,本设计选取的为GY-521三维角度传感器。其内部设置有MPU6050芯片模块,该芯片采用标准IIC通信协议,所以其使用的信号线只有SCL信号线以及SDA时钟线两个,并且该种通信方式具有自动寻址以及仲裁等功能。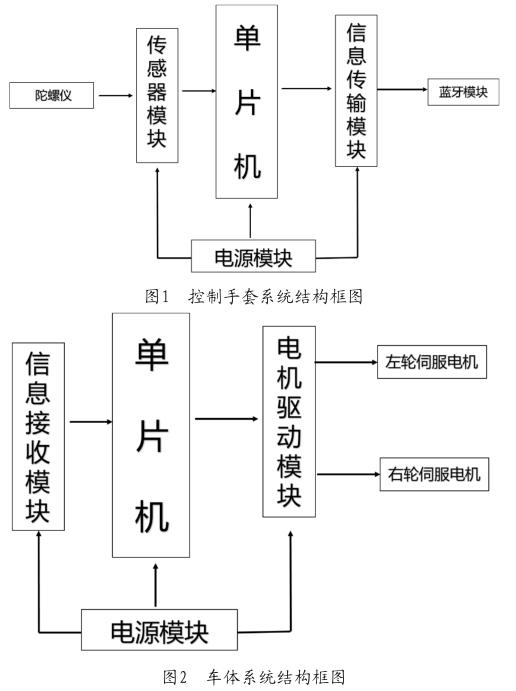
蓝牙:蓝牙是一种无线技术标准,能够实现设备之间的短距离数据交换。蓝牙的适用范围非常广,尤其是在蓝牙耳机、蓝牙音箱设备上应用非常广泛。本设计采用的蓝牙模块为HC-05。该模块在空旷地带有效传输距离10m,超过10m,连接的质量就难以保证了。
电机驱动:本设计应用的电机驱动为L298N。供电范围为7V到35V,通过PWM调速就可以很轻松的控制电机的转动,也就控制了智能车的运动速度。本设计的车身采用的是差速转弯的方式,即两个电机带动的运动轮与一个万向轮组成,该种方式结构简单,控制方便,并且成本低廉,转弯的方向以及角度完全由两个电机的转速决定,甚至可以原地转弯,很适合该设计。L298N模块可以驱动两个电机,因此,本设计只需要一个就可以完成预设目的。
3 软件设计
本设计要实现的功能为根据手势的变化来控制智能车的前进、后退以及转弯。本设计要解决的第一个问题为手势动作的识别问题。本设计利用的陀螺仪,其采用IIC总线通信方式,本设计利用的单片机的型号为STC89C51,其没有IIC接口,因此只能通过普通的I/O口模拟IIC接口。一个标准的IIC通信由4个部分组成:开始信号、从机地址输出、数据输出、停止信号。只要控制程序正确,51单片机就可以通过使用引脚模拟IIC时序,完成IIC通信的四个时序部分,达到IIC通信的目的。本设计要解决的下一个问题为手势动作信息的传递与接收,这个过程由蓝牙模块解决。最后要解决的问题为智能车运动的控制问题,本设计利用的是L298N电机驱动模块,其利用的很重要的技术为PWM技术,即脉冲宽度调试。每一脉冲宽度均相等的脉冲列作为PWM波形,通过改变脉冲的宽度或占空比就可以调压。如今绝大部分的单片机都有PWM模块功能,本设计所使用的51单片机也有,只要通过中断程序的设定,就可以完成任意的输出电压控制。通过这些问题的解决,本设计就能顺利的完成各项功能。本设计中手掌与地面持平,当手掌绕手腕左转的时候,智能车左转,当手掌右转的时候,智能车右转。手掌往前压低的时候,智能车前进,当手掌向后抬高的时候,智能车后退。具体的流程图如图3所示。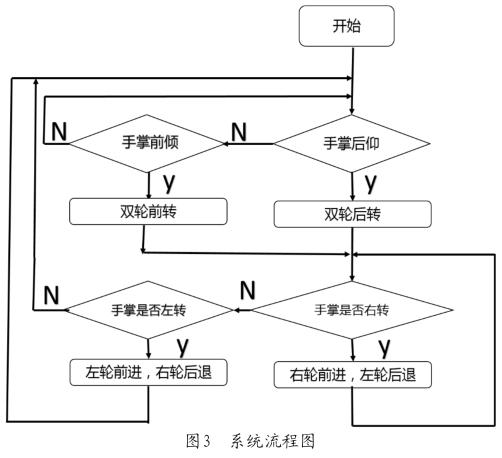
4 结论
本设计是结合了各方面的信息技术才实现功能的,通过各项技术的柔和,相信本设计还会有更深层次的提升。本设计实现的是手势控制智能车,但是本设计所利用的方法技术绝对不仅限于此,例如对于一些危险的场合,完全可以利用本设计的思想制作出专门的器械,利用远程监控、手势控制的方式,在保证人员安全的情况下,依然能够顺利的完成预定目标。对于一些密闭且不能随意打开的空间,预先放置一个类似的器械以应对突发状况也是一个很好的选择,相信该设计的思想一定能在未來的工业生产以及相关领域内得到进一步的发展。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2018年12期)2018-08-01
百科探秘·航空航天(2017年9期)2017-12-31
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年19期)2017-02-02
山东工业技术(2016年15期)2016-12-01
