一种改进干扰观察最大功率跟踪算法
2018-08-20 02:20刘传洋
浙江水利水电学院学报 2018年4期
刘传洋,孙 佐
(池州学院 机电工程学院,安徽 池州 247000)
0 引 言
随着全球性能源危机的加剧和环境污染的日益严重,开发和利用可再生能源,被越来越多的国家重视.太阳能光伏分布式发电近年来受到世界各国的普遍关注[1],在各级政府的重视下,光伏分布式发电产业得到了蓬勃地发展.
光伏阵列在温度、光照强度变化下都有相对应的工作曲线,通过自寻优过程,实现最大功率输出,最大功率跟踪(MPPT)控制方法包括固定电压法、直线近似法、干扰观察法以及电导增量法[2].固定电压法在环境变化时,通过将最大功率点电压设置为开路电压的0.71~0.78实现最大功率跟踪,具有控制简单、易于实现,但是环境适应能力差,当环境温度和光照剧烈变化时无法完成最大功率跟踪.直线近似法根据光伏阵列在不同光照强度下的最大功率点近似处在一条直线上,利用功率与电压变化量等于0来判断,控制光伏阵列工作点在近似直线上变化实现最大功率跟踪,该方法跟踪控制简单,但是跟踪准确度不高.电导增量法利用光伏阵列P-U曲线最大功率点处的斜率为0,功率对电压的导数为0,即ΔI/ΔV=-I/V,采用计算导纳I/V和导纳增量ΔI/ΔV实现光伏阵列的最大功率跟踪;该方法在光照强度突变时,光伏阵列端电压可以平稳输出,但是对传感器要求较高、系统响应速度要求较快[3].
现有的太阳能光伏发电最大功率跟踪普遍采用干扰观察法,通过周期性对光伏阵列输出电压的扰动,观察扰动前后的输出功率变化情况,利用输出功率的变化判断电压扰动方向,该方法结构简单、控制方便,但是在最大功率附近会引起振荡,导致功率损失较大[4].为了减少干扰观察法在最大功率跟踪点附近振荡引起的功率损耗,本文在干扰观察法的基础上引入模糊控制,提出一种固定步长干扰观察法与变步长模糊控制相结合的MPPT控制算法.
1 光伏阵列建模
通过对光伏阵列特性的分析,光伏阵列简化等效电路模型[5-6](见图1).
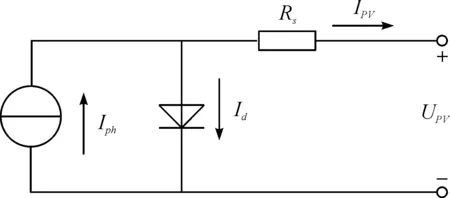
图1 光伏阵列等效电路模型
光伏阵列的输出电压、电流分别为UPV、IPV,其中光伏阵列的输出电流等效为光生电流Iph减去二极管电流Id,即:
IPV=Iph-Id
(1)
(2)
由公式(1)、(2)联立得到:
(3)
表1给出了光伏阵列参数,根据表1以及对光伏阵列实际测量得到的I-U曲线,利用曲线拟合得到公式(3)中的参数(见表2).
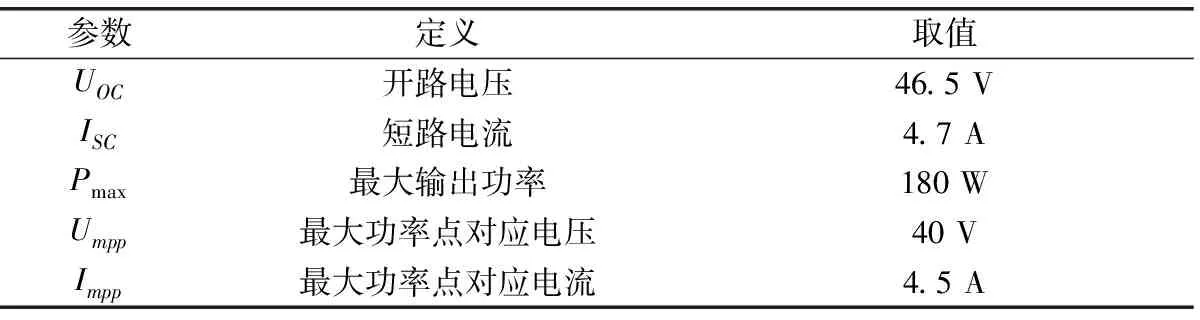
表1 光伏阵列参数表
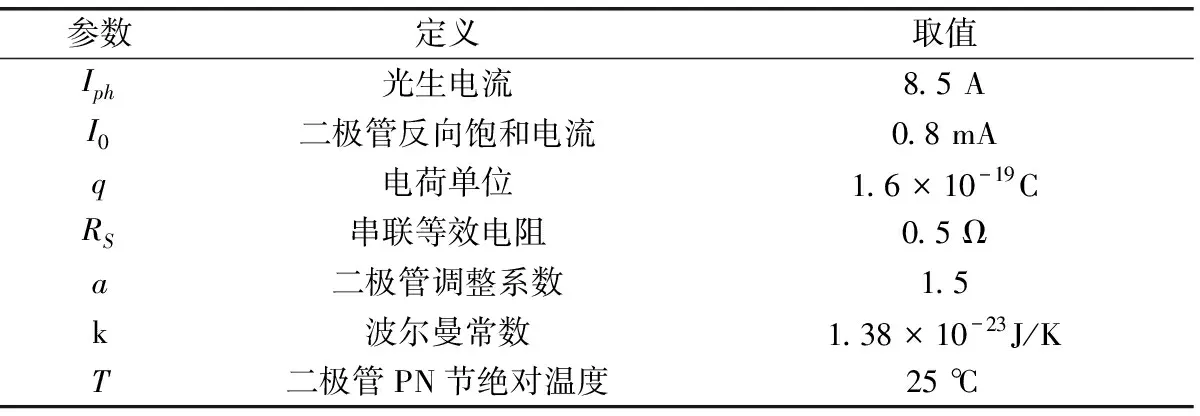
表2 光伏阵列拟合参数
利用MATLAB/Simulink建立光伏阵列仿真模型,仿真得到光伏阵列I-U特性曲线(见图2),ISC=4.7 A,UOC=46.5 V,最大功率Pmax=180 W,最大功率点处Impp=4.5 A,Umpp=40 V,仿真参数与实际光伏阵列参数基本一致.
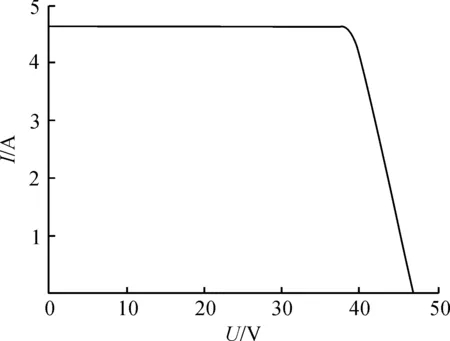
图2 光伏阵列I-U特性曲线
2 改进MPPT算法
干扰观察法(DOM)是对光伏阵列输出电压进行周期性扰动,观察扰动前后的输出功率变化,通过输出功率的变化确定扰动方向.结合流程(见图3),控制器在每个控制周期内,读取光伏阵列电压UPV和IPV,计算当前光伏阵列功率PPV,利用当前功率Pi与干扰前所记忆的功率Pi-1进行比较,以固定步长扰动光伏阵列输出电压;如果Pi大于Pi-1,则扰动方向为UPV+ΔU,如果Pi小于Pi-1,改变扰动方向,扰动方向为UPV-ΔU,如此循环进行.但是干扰观察法使光伏阵列在最大功率点附近引起振荡,导致功率损失较大.

图3 干扰观察法程序流程图
为了克服干扰观察法的缺陷,在干扰观察法的基础上引入模糊控制,本文提出一种固定步长干扰观察法与模糊控制变步长相结合的改进MPPT控制算法,可以有效减少光伏电池在最大功率点处出振荡所引起的功率损耗.
模糊控制算法将光伏阵列的输出信号误差,经过模糊化处理变成模糊量,输入到模糊推理模块得出模糊集合,利用反模糊模块转换成清晰数字量以控制被控对象[7-8].由光伏阵列P-V特性曲线得出,光伏阵列在最大功率点处有dP/dV=0,dP/dV为光伏阵列P-V曲线的斜率,P-V曲线斜率的绝对值大小,决定工作点离最大功率点处远近.模糊控制的两个输入量分别为误差变化量e和功率变化量dP,e=dP/dV,dP=P(k)-P(k-1),扰动步长的变化量dS作为模糊控制器的输出量,扰动变化量dS如果取值太小,引起功率跟踪时间过长,dS如果取值过大,引起功率损耗增大,通过选择合适的扰动步长dS实现对电路占空比的调整,使光伏阵列工作在最大功率点.
结合功率、扰动步长的变化情况,将输入输出变量的论域规定为-6~+6,在MATLAB中建立了模糊控制器,给出了模糊规则(见表3),将dP/dV、dP和dS定义为7个相同的模糊子集{NB,NM,NS,Z,PS,PM,PB},分别表示为负大、负中、负小、零、正小、正中、正大,并为各模糊子集选择合适的隶属度函数,模糊输入输出量的论域为{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}.dS=(-0.05,0.05),dP=(-30,30),为实际测量值的变化范围,再经过量化因子把他们划到各自模糊论域之中.针对光伏电池的固有特性,隶属度函数采用三角形形状表示,隶属度函数(见图4,图5),图4为dP的隶属度函数,图5为dS的隶属度函数.
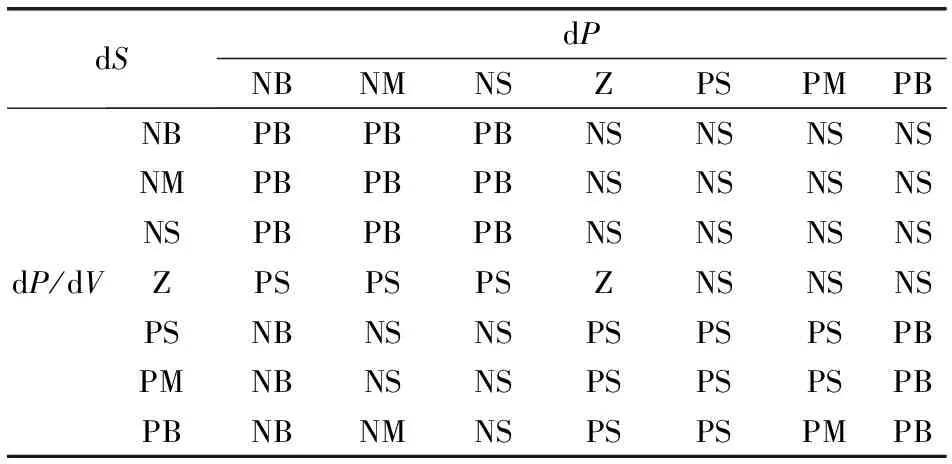
表3 模糊规则
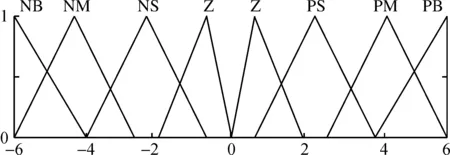
图4 dP的隶属度函数
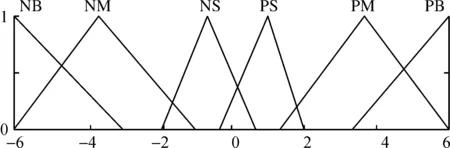
图5 dS的隶属度函数
3 仿真验证
根据图6 MPPT控制原理图,利用MATLAB中Simulink建立了MPPT仿真模型(见图7),在得到图2的光伏阵列仿真模型基础上增加MPPT模块和DC/DC电路,光伏电池采用三块并联,DC/DC电路为Boost升压电路,MATLAB仿真采用ode23tb算法,光伏电池最大输出功率为540 W,在光伏电池温度25 ℃、模拟日照强度在1 000 W/m2,仿真时间0.3 S.

图6 MPPT控制原理图
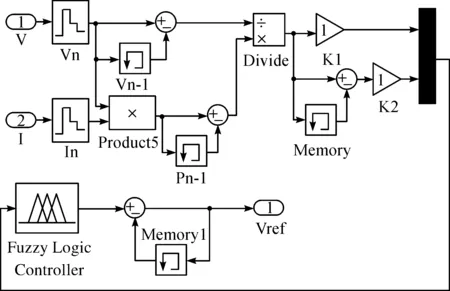
图7 MPPT仿真模型
对采用干扰观察法和本文提出的的改进算法进行仿真,图8为干扰观察算法功率仿真波形图,图9为改进算法功率仿真波形图.通过对比可以得出采用干扰观察算法在最大功率点附近存在功率振荡,采用改进算法不仅在最大功率点附近功率振荡较小,而且能够实现最大功率的平稳、快速、准确跟踪.
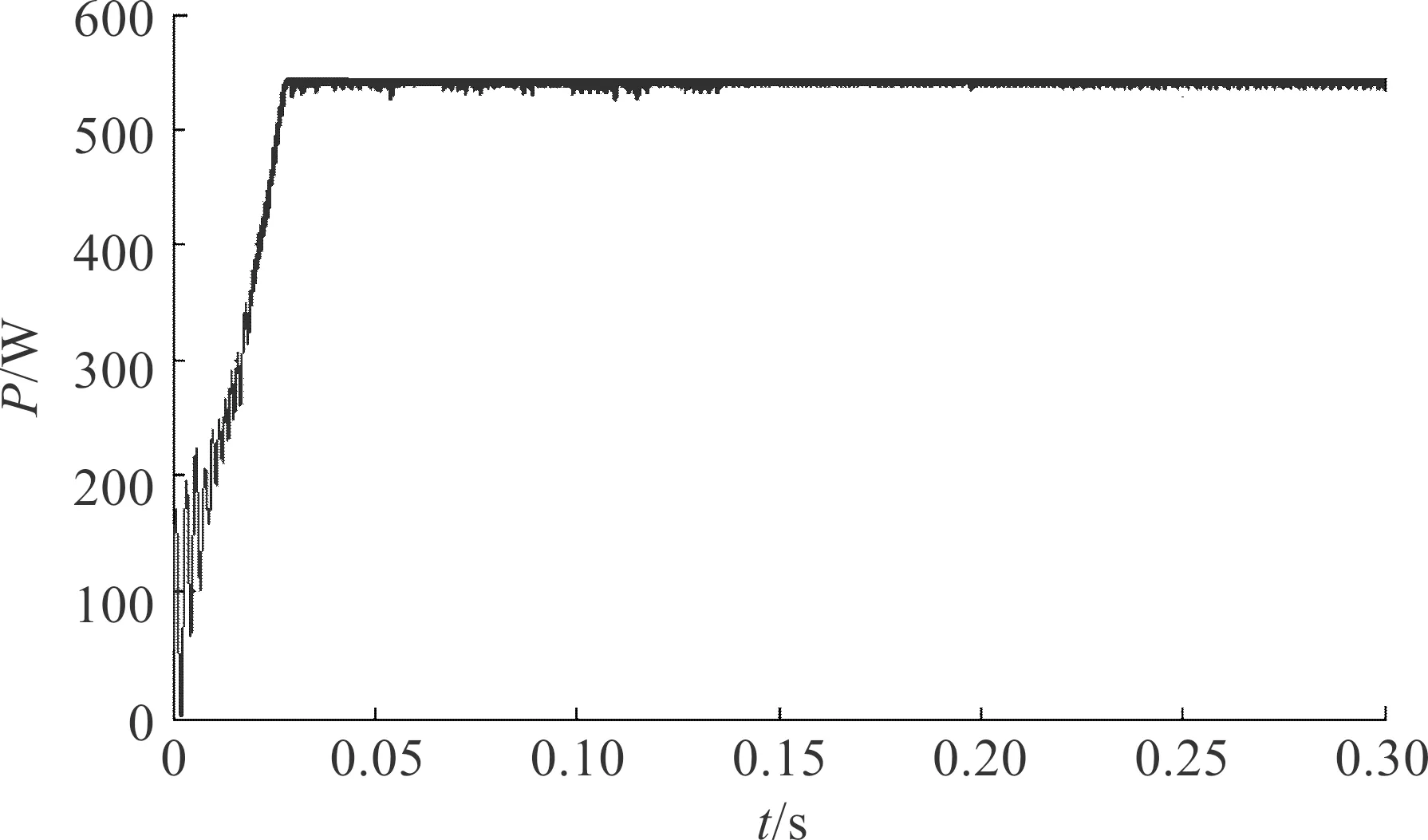
图8 干扰观察算法功率仿真波形图
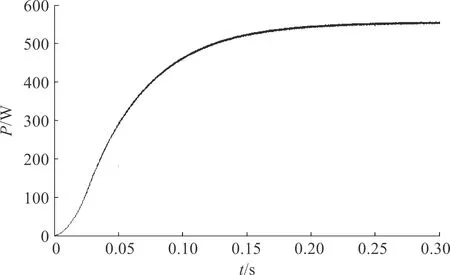
图9 改进算法功率仿真波形图
改进算法通过干扰观察算法与模糊控制算法通过选择开关进行切换,先通过干扰观察算法设置较大步长快速接近最大功率点,再利用模糊控制进一步逼近最大功率点并实现稳定,达到光伏系统快速和高精度的跟踪要求.两种算法的结合既提高了光伏阵列跟踪的快速性和准确性,又能平稳地跟踪到最大功率点,减小光伏阵列在最大功率点处振荡引起的功率损耗.
4 结 论
本文分析了光伏阵列的工作特性,研究了光伏阵列的等效电路,建立了光伏阵列仿真模型,对比了光伏阵列常用最大功率跟踪控制方法的优缺点,为了克服光伏阵列采用干扰观察法在最大功率点处振荡引起的功率损耗较大的缺陷问题,提出了固定步长干扰观察法与变步长模糊控制相结合的MPPT控制算法.利用仿真软件建立了改进算法的仿真模型,通过仿真对比了改进算法与传统干扰观察算法的功率曲线,改进算法不仅在最大功率点附近功率振荡较小,而且能够实现最大功率的快速和准确跟踪.干扰观察与模糊控制相结合的最大功率跟踪算法在平稳地跟踪到最大功率点的前提下,减小光伏阵列在最大功率点处振荡引起的功率损耗,有效地提高了光伏阵列跟踪的快速性和准确性.
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
汽车实用技术(2022年5期)2022-04-02
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年6期)2021-02-12
河北理科教学研究(2020年2期)2020-09-11
中国惯性技术学报(2020年2期)2020-07-24
作文成功之路·小学版(2020年1期)2020-03-03
电子制作(2019年16期)2019-09-27
电子制作(2016年21期)2016-05-17
中学生数理化·高三版(2016年4期)2016-05-14