理管机机器视觉摄像机结构设计
2018-08-17 07:19:24蒙春学张团善冀永乐颜亚飞
纺织报告 2018年6期
蒙春学,张团善,张 帆,冀永乐,颜亚飞
(西安工程大学 机电工程学院,陕西西安 710048)
关键字 理管机;机器视觉;图像处理;图像采集
目前,在纺织行业中信息高速发展,纺织行业中对技术的要求越来越高,降低企业的成本提高生产效率对企业至关重要。理管机利用摩擦力和自身重心偏移,通过理管轮和纱管的摩擦,经纱管轮的旋转来整理纱管。这种理管机只能整理大小头的纱管,但不能对不同颜色和带残线的纱管进行识别。LGJ200B全自动络筒理管机是比较先进的理管机。采用机器视觉检测技术判别细纱管颜色、方位和残纱状态,对细纱管分类,但采集图像清晰度低,对残线纱管以及残管不能准确检测判断,实际应用中效率和准确率较低。
本课题采用理管机对纱管采用机器视觉检测技术,设计纱管图像采集结构,利用背景差分法处理图像,通过控制电机动作实现纱管的分拣,同时能准确快速地检测出纱管的大小头、残线管、断管以及两管的嵌套等问题,实现分拣。
1 理管机的工作原理
目前,针对纺织机械中,理管机主要整理分拣杂乱的纱管。自动理管机效率高、正确率高、速度快和抗干扰性能强,但缺点是技术不够成熟。理管机工作过程首先是把杂乱无章的纱管通过输送机构将纱管送进理管机。利用纱管中心偏移和纱管的大小头的特点,由理管轮先整理纱管大小头统一,然后送至传送带,传送带将各种不同颜色的纱管经过光照良好摄像机区域,摄像机采集视频图片传送给图像采集卡,再将数据传送给图像处理软件,并将处理数据传给控制系统。控制电机的动作,将不同颜色纱管和残管打进相应的通道。最后,用传送带将纱管框运走[1-5]。
2 机器视觉系统的组成
机器视觉检测是一种非接触式的检测技术,而理管机机器视觉检测系统利用光学和摄像机自动地获取纱管图像并处理图像获取需要的信息用于控制理管机电机动作来实现纱管的分拣。理管机机器视觉检测系统一般由光源、镜头、相机、图像采集卡组成[6-8]。
2.1 光源选择
系统中,照相机并不能看见物体而是看见物体表面反射出来的光。光源和光照方式是机器视觉系统输入的重要因素,直接影响输入效果和图像采集[9-12]。光源和光照方式没有标准的规定,只能根据实验来选择光源和光照方式。理管机机器视觉照明结构如图1。
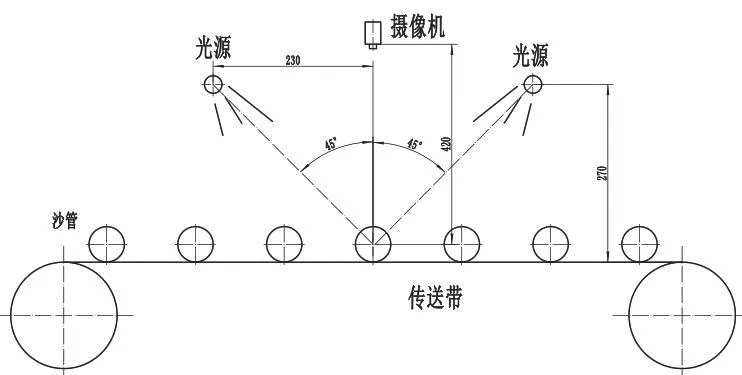
图1 照明结构
图1 采用双LED光源能消除纱管的阴影,光源和传送带的夹角为45°,以保证有更多的反射光进入摄像机镜头。经过实验验证,光源到传送带的距离270mm,距摄像机230mm。光源的强度可以根据外界环境来调节达到最佳效果,使其采集到更清晰有效的图像视频。
2.2 镜头
镜头是系统的重要部分,功能是成像,镜头的质量直接影响成像的质量从而影响系统的整体性能。工业镜头的主要参数:焦距、光圈(相对孔径)、视场、物距、相距、景深、分辨率、放大倍数、畸变、视野[13-14]。图2为镜头的结构原理图。
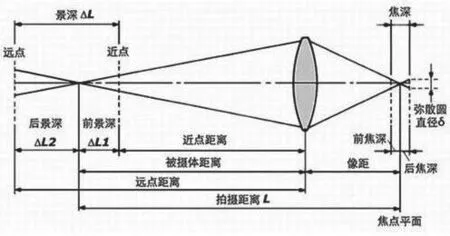
图2 镜头的结构原理图
摄影镜头的基本光学性能由焦距、相对孔径和视场角这3个参数表征。因此,在选择镜头时,首先需要确定这3个参数,然后考虑分辨率、景深、畸变、接口等。
2.3 相机
2.3.1 相机的选择
工业用相机主要是CCD和CMOS两种。CCD相机是以CCD芯片为核心将物理图像经光电转化变成视频图像信号,CCD相机包括CCD传感器、驱动电路、信号处理电路、外壳及机械光学接口。CMOS是和计算机接口集成在一块的硅片上的图像传感器器件,该器件结构简单、成品率高、价格低等优点,但是成像质量差、处理速度慢等,但CMOS有价格低、功耗小、尺寸大、集成电路多等优点,应用越来越广泛。最终根据对比图像的清晰度、速度,选择德国生产的Balser acA640-120ucCCD工业相机,该相机658px×492px,水平 /垂直像素 5.6µm×5.6µm,像素位深12bits,功率2.4W,帧速率120fps有通用接口,完全满足传送带速度和光照设计要求。
2.3.2 相机采集照片设计
理管机中,纱管是经过传送带运送的经过摄像机被摄像机拍照采取图像信息,传送带速度设计0.1m/s,每分钟3~6m。由于纱管自身重量轻,传送带在传送的过程中纱管有自传现象,对图像的采集结果影响不大,摄像头固定不变,该设计摄像头固定在传送带的正上方,距纱管中心420mm,镜头对准纱管,不同颜色的纱管随传送带经过摄像头区域,摄像机将采集的图像传送到图像处理单元,后处理的信息传送到上位机。
2.4 图像采集卡
图像采集卡是对摄像机输出的数据实时采集提供与计算机的接口。图像采集卡有两种形式PCI和PXI总线,而PXI产品是基于PCI总线的,而PCI总线抗震动、撞击,而且对环境的温度、湿度有极强的适应性。
3 软件方法设计
机器视觉系统设计涉及到图像处理。图像处理主要运用python-opencv来处理图像,理管机纱管主要是运动目标,运动检测有帧差分法、运动模块法、背景差分法等。背景差分法[15-17]主要针对静态背景的应用,而理管机纱管传送带背景一直不变。本系统采用背景差分法建模算法。
背景差分法是一种对静止场景进行运动分割的通用方法,它将当前获取的图像帧与背景图像做差分运算,得到目标运动区域的灰度图,对灰度图进行阈值化提取运动区域。为避免环境光照变化影响,背景图像根据当前获取图像帧进行更新。 考虑到检测目标快、检测准确、易于实现,本系统背景变化差异极小,光照变化差异不大,机械振动不大,故采用该方法。对视频图像采集处理算法流程图,如图3。
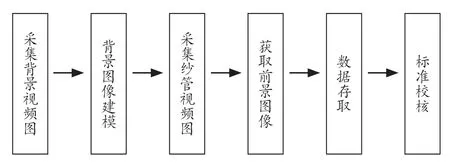
图3 视频图像采集处理算法流程图
首先,只对运动的传送带采集图像对传送带进行背景建模,接着对放有各种不同颜色的传送带采集图像,用背景差分法处理后,用采集到的有纱管的视频图减去背景图取绝对值,若像素点大于阈值则为前景图。得到了想要的纱管彩色图后,对纱管的RGB图像进行滤波、阈值和灰度处理图,提取纱管轮廓。最后,对纱进行颜色识别、保存参数和标准核对完成识别。
4 实验测试和分析
本设计主要应用光源摄像头对理管机不同颜色纱管检测,需要进行实验测试。采用双LED光源和摄像头对纱管进行图像采集,并运用背景差分法对采集的图像进行处理,最终对得到的纱管图像进行灰度处理和阈值化处理提取轮廓。采集到的图像和经过处理的图像,如图4。图5则是原始的光源和摄像机设计采集的图像视频。
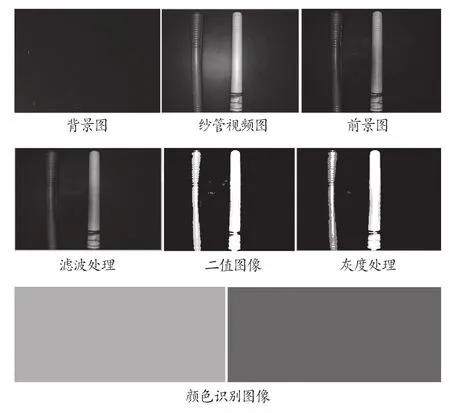
图4 新系统采集和处理的图像
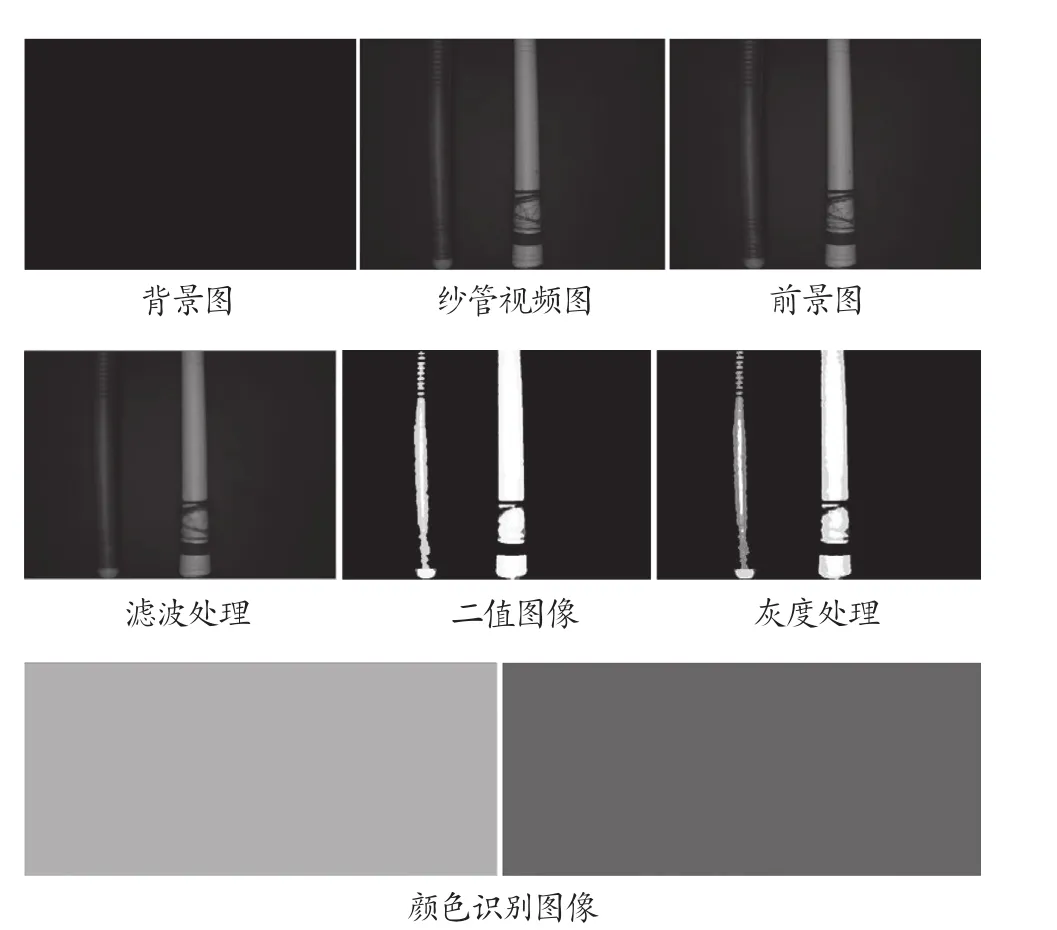
图5 原始系统采集和处理的图像
对采集图像对比,纱管视频图和前景图没有大的差别,从颜色识别图像观测设计系统采集到的图像更接近纱管本身颜色。调整理管机的传送速度、采集图像的方式和图像处理方法,采集到的图像更清晰,能更准确地判定出纱管的颜色。同时,采用图像处理的方法简单,传输数据量小速度快能,使系统能快速地做出响应,提高效率。
5 结语
本课题以理管机为研究对象,设计一种图像采集系统,采用的的是机器视觉采集视频图像的结构,节约了大量的检测时间,运用新的检测方法和图像处理相结合,达到稳定采集视频图像,快速处理图像,控制分拣纱管的作用。通过对系统的实验检测和现场调试,系统满足对理管机的要求,摄像机可以快速稳定地采集图像视频。与传统的理管机相比较,机器视觉检测系统快速、准确,具有一定的实际应用价值。
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
塑料包装(2022年2期)2022-05-18 06:00:46
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16 05:32:58
纺织器材(2021年2期)2021-12-04 04:07:36
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
天津工业大学学报(2018年5期)2018-11-10 03:50:58
科技资讯(2016年12期)2016-05-30 05:07:58
物探化探计算技术(2015年2期)2015-02-28 17:42:47
振动工程学报(2014年2期)2014-03-01 01:15:10
城市道桥与防洪(2014年8期)2014-02-27 07:29:06