
四轮驱动电动汽车多Agent能量管理体系研究
2018-08-17 00:50殷国栋李广民陈建松
中国机械工程 2018年15期
殷国栋 李广民 朱 侗 陈建松
东南大学机械工程学院,南京,211189
0 引言
纯电动汽车凭借其动力传输损失小、控制较为柔性和能量利用率高等优势,引领着未来汽车的发展方向,已经成为未来智能汽车以及智能交通技术发展的基础。伴随着我国汽车保有量的不断上升,大力发展电动汽车技术更加紧迫,然而,充电时间长、续驶里程短和初始成本高等问题已经成为制约电动汽车大规模产业化发展的瓶颈,解决纯电动汽车系统的能量管理问题迫在眉睫。
面对电动汽车机电一体化程度的加深和汽车动力电池产业的迅速发展,用于延长汽车续驶里程、提高电源电能利用效率和促进能源清洁化的能量管理策略成为控制领域的研究焦点。目前,大部分能量管理策略都只针对混合动力汽车的燃油与电能分配方面的问题,对于轮毂电机驱动电动汽车的相关研究较少,缺乏完整的、较为规范的体系结构。人工智能的兴起使得车辆系统的能量管理研究也逐渐向人工智能方向靠拢,通过构建对应的智能控制系统,可以设计出能够“自主思考”的能量控制策略。
多Agent系统(multi-Agent system,MAS)作为分布式人工智能(distributed artificial intelligence,DAI)领域的重要分支,已经成功应用于各类复杂工程控制问题的求解[1]。多Agent系统是指由多个能力、知识有限且状态不同的Agent所组成的Agent联盟,这些成员Agent在同一个大的目标之下,通过任务分解、协商和协作共同完成任务[2]。多Agent系统通过分散控制和并行处理实现更加迅速的问题求解[3]。可传递置信模型(transferable belief model,TBM)最早应用于处理动态环境的证据推理问题,国内外在该方面的研究多集中于模型算法的构建以及决策框架的建立,尚未运用在具体的工程实践中。
本文基于多Agent系统思想,构建四轮驱动纯电动汽车能量管理体系框架,研究四轮驱动电动汽车各用电系统的能量控制,在保证整车动力性的前提下实现车辆全局能量分配最优。
1 能量管理多Agent体系构建
电动汽车的能量管理策略主要用于对整车能量进行优化分配、对动力电池的剩余能量以及电动汽车剩余里程进行估计、为电动汽车提供最佳驾驶模式、对电池工作状态进行监控等方面[4]。管理策略设计、剩余里程估计以及回馈能量收集是目前电动汽车能量管理研究中的热点和关键技术[5]。根据四轮驱动电动汽车系统的结构以及多Agent系统的设计机制,构建图1所示四轮驱动电动汽车能量管理多Agent体系框架。图1中,-Si表示Agenti的特征向量,-mi表示基于Dempster规则的置信指派函数,mc表示融合中心对某置信指派的融合结果。
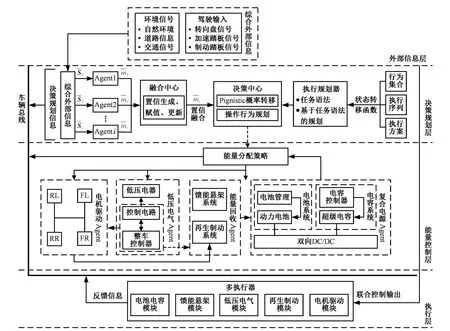
图1 能量管理多Agent体系Fig.1 Energy management multi-Agent system
能量管理多Agent体系分为外部信息层、决策规划层、底层能量控制层和执行层共4个层级,底层控制层包括复合电源(compound power,CP)、电机驱动(motor driving,MD)、能量回收(energy recuperation,ER)和低压电气(low-voltage electrical system,LES)4个子系统Agent。电动汽车在道路行驶时,多Agent体系能够根据动力需求、环境变化和道路信息等外部知识,通过上层的决策规划机制,合理配置各Agent的能量供给,同时能够充分回收并贮存馈能主动悬架以及再生制动系统所产生的能量。在能量合理分配的同时,各Agent能够相互协作,高效完成当前系统操作任务,从而实现系统全局能量最优。
1.1 复合电源Agent
电动汽车动力电池仍是目前应用于电动车辆的最主要能量源,然而动力蓄电池存在能量密度偏低、瞬时放电功率较小等问题,在极限工况下大电流放电会使得电池内部结构发生变化,不仅影响电池寿命,更有可能导致电池出现热失控现象,产生自燃或者爆炸的危险。超级电容器是一种新兴的汽车电力储能元件,瞬时功率大、使用寿命长和充放电响应快等优势使得超级电容器能够作为电动车辆的辅助输出源,加入到电动汽车的电源系统中。
通过分析四轮驱动纯电动汽车各主要用电机构对能量的需求,结合车辆驱制动系统的动力性能要求,构建的复合电源Agent见图2。复合电源Agent由锂离子动力电池和超级电容组成,两者以双向DC/DC转换器连接。电源系统通过Agent协调分配控制器与电气负载连接,能够满足电源系统在纯电动汽车大功率工况下合理的放电要求。

图2 复合电源Agent结构示意图Fig.2 Schematic diagram of compound power Agent
1.2 电机驱动Agent
轮毂电机驱动系统作为四轮驱动电动汽车最重要的执行机构,同样也是电动汽车众多子系统中耗能最多的单元。针对轮毂电机驱动系统对能量效用方面的需求,建立的电机驱动Agent见图3,考虑能量系统与动力学性能之间的耦合机理,设计四轮驱动电动汽车驱动系统能量优化分配控制方法,并通过多Agent系统协调分配机制对能量供给与能量分配方面的冲突问题进行高效协调,实现驱动系统能量分配的经济最大化。
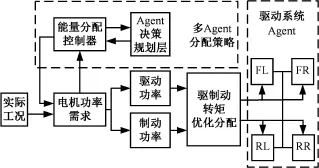
图3 电机驱动Agent结构示意图Fig.3 Schematic diagram of motor driving Agent
1.3 能量回收Agent
目前应用于四轮独立驱动纯电动汽车的能量回收装置通常包括轮毂电机再生制动系统和主动悬架馈能系统。再生制动是指车辆在减速或制动过程中,通过使用一些特别的装置将车辆制动动能进行转化并储存起来以供再次利用[6]。主动悬架馈能的目标就是回收由不平路面激励引起的振动能量,用于车辆的主动减振[7]。
探究再生制动系统和主动悬架馈能系统对能量回收的基本方法和原理,构建的能量回收Agent,见图4。将该Agent与复合能源系统、轮毂电机驱动系统等建立关联,实现汽车能量的合理利用。
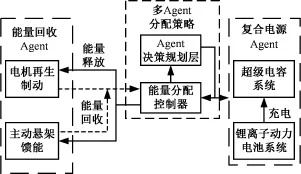
图4 能量回收Agent结构示意图Fig.4 Schematic diagram of energy recuperation Agent
1.4 能量管理多Agent体系数学模型
本文在构建能量管理多Agent体系时对整车各用电系统 Agent进行建模[8],各系统 Agent以EM_Agenti表示,可以表示为下列五元组:

其中,Ni表示各系统自身属性集,包含静态属性集和动态属性集,各系统的静动态属性集所含内容不同,如对于复合电源Agent,其静态属性包括电池容量、额定电压电流和内阻值等固有属性,而其动态属性包括荷电状态(state of charge,SOC)、电源温度等随运行时间变化的参量;Mi表示系统能够执行的任务集合;Ri表示系统的需求信息集,分为能量需求集Pi和优先级函数集Ui;Ci表示任务与能量分配策略集;Ai表示系统的当前状态集,是经过任务与能量分配策略处理后的具体体现。
在能量管理多Agent体系下,单个Agent无法单独完成系统任务或动作,需要对任务性质进行分析,各Agent间通过协作对任务进行准备与解决,因此,系统任务分配与能量分配是必要的。本文采用基于联合分配策略的数学模型[8]对能量管理Agent所辖的各Agent进行任务分配和能量分配。各Agent间能够通过车辆总线直接或间接地进行通信和数据交互,对整个车辆系统的总能量进行数学描述,记作则任务与能量分配可表征为
Agent的任务与能量分配状态方案可表示为
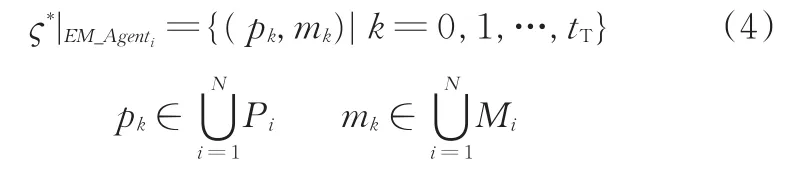
式中,tT为系统所能分配的最大任务量;pk、mk分别为各Agent执行任务所需(产生)能量和对应系统任务。

约束条件为

式中,Λ为所有分配状态方案的解空间;opt表示优化函数;G(ς)为分配状态方案目标函数,本文中的设计目标为车辆全局能量最优;nlim为各Agent自身动静态属性约束;nlim,max、nlim,min分别为属性约束的上下限。
对分配状态方案做最优化处理,即有
2 基于状态转移和TBM的能量管理多Agent决策规划层
为了保证成功地完成系统操作任务,各Agent不仅要依赖于正确的任务表述和操作序列,而且要依靠用于表征各个操作序列中有效行为的动作方案。任务规划的目的就是使系统自动地生成一系列操作序列和有效行为的动作方案[9]。
2.1 基于状态转移的行为规划
本文采用基于状态转移的行为规划对能量管理多Agent下层各系统Agent的操作行为进行建模,设各Agent的环境状态集合ξ={ε1,ε2,…,εn},则有
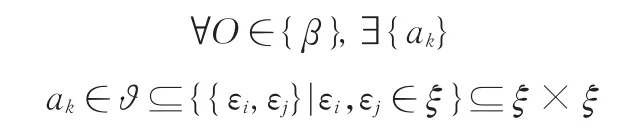
式中,β为系统操作行为集合;ϑ为动作方案集合;ak为动作序列;ξ为动作方案或状态转移弧;O为系统行为合集;下标k表示该动作序列的序号,为某特定值,与系统属性相关。
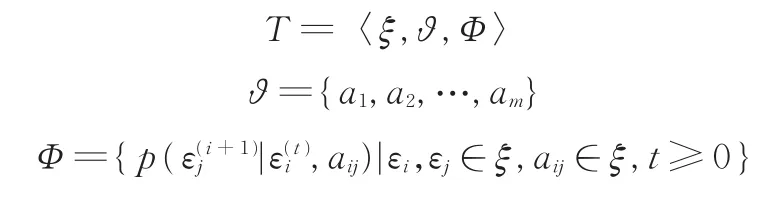
将动作方案作为一个马尔可夫链进行建模,模型在形式上以下面的三元组表示:

进一步区分下一个状态的无知的概念[10-11]。无知由 赋 予的概念质量定义,表示为满足以下性质:

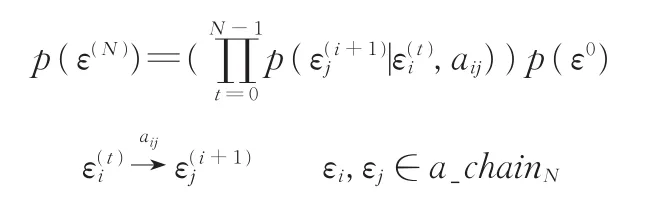
在任务规划中,假设生成的规划是顺序的,且能够表示成一个长度为N的状态转移链a_chainN。的概率依赖于的概率,可以表示为

所以达到一个期望的最终状态的概率可以通过下列方程进行计算:
对于系统任务集,定义任务语法χ作为一类分解规则,用于提取各系统间的相互作用关系。任务语法可以由下列的4元组定义:

式中,ϑt为对应于预定义简单动作方案的终结符集合;ο为呈递至高层操作行为规则ϑ-ϑt中的元素;ϖ为一个产生式规则的有限集。
任务语法可以看作是一个产生各种排列与组合的生成函数,在本质上是递归的。
针对给定的任务语法,能够由该任务语法生成规划,表示如下:

2.2 基于TBM的多Agent决策融合框架
在能量管理多Agent体系中,单个系统Agent无法获取环境的完整信息,它们必须通过合作完成系统操作任务。目前应用于工程上的协调方案都需要Agent之间直接的信息分享和通信,信息共享可以是显式的,也可以是隐式的[12]。由于车辆系统通信存在一定的局限性,各系统Agent之间难以保证高效的实时信息共享,故本文采用基于可传递置信模型的分布式决策方法[13]对能量信息进行综合,系统框架见图5,图中,Pk为Pignistic概率值,θk表示所考虑模式k的前提,A为辨识框架的子集。
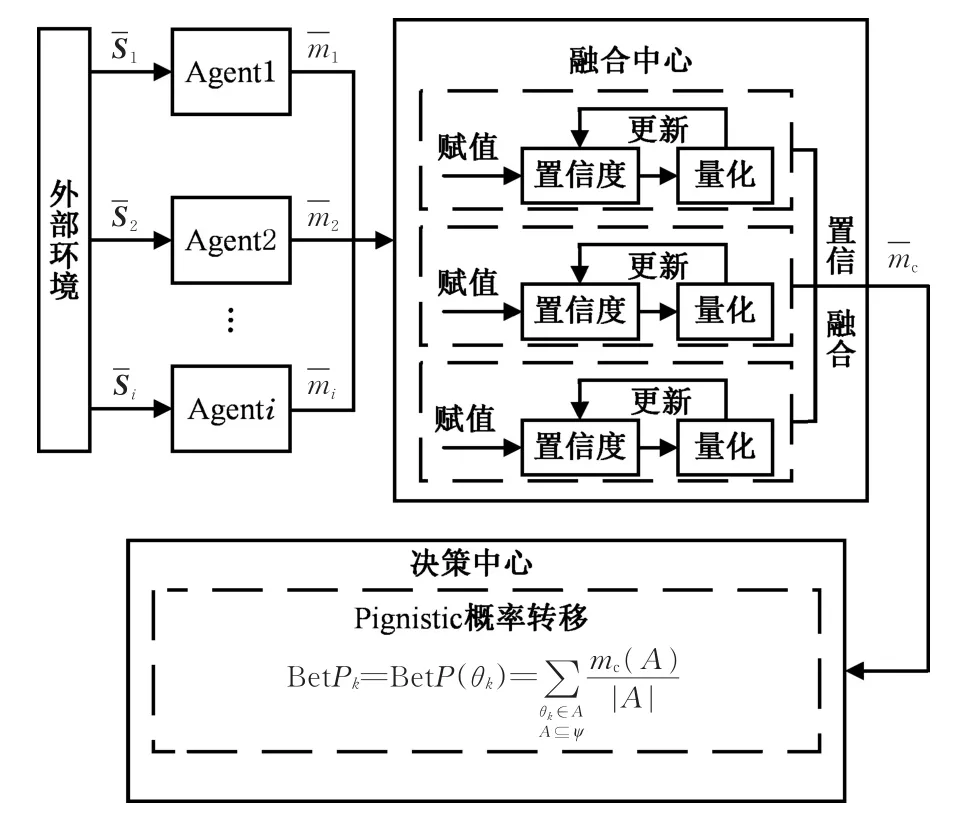
图5 基于TBM的分布式决策系统框架Fig.5 Frame diagram of the distributed decision system based on TBM
TBM是一种双层模型,由Credal层和Pignistic层组成。Credal层对获取的置信度[14]进行量化、赋值和更新处理,Pignistic层则将处理过的置信度转化为Pignistic概率并由此作出决策。
基于TBM的分布式决策方法中,各系统Agent彼此之间可以不进行直接的信息分享,而是通过一个预置的融合中心来进行交流。融合中心通过组合每个Agent的基本置信生成对整个环境信息的置信值,决策中心则通过对置信值的处理产生Pignistic概率,而决策的制定是根据Pignistic概率得出的[15-16]。
将车辆系统整体能量信息定义为集合InfT={li,di},其中,li表示能量的大小,di表示能量的流动方向。这两项信息分别由Agentl和Agentd进行观测。令Agentl的辨识框架Ψl={小,较小,较大,大}。令Agentd的辨识框架Ψd={流入,流出}。Agentl和Agentd可以通过整体能量信息,即能量大小和流动方向分别得到相应的基本置信指派。
设Agentl的特征向量为Sˉl,根据系统能量分配的特点定义四组参考向量υl,1~υl,4,则Agentl的测度函数定义为


从而得到Agentl置信指派为ml(小)、ml(较小)、ml(较大)、ml(大)、ml(Ψl)。设Agentd的特征向量为Sˉd。根据系统能量流动的特点定义能量消耗为φout,能量回收为φin,又定义Agentd的测度函数为

其 中 ,i=out,in;φi=kπ,k∈Z。 可 以 得 到Agentd的置信指派md(流入)、md(流出)、md(Ψd)。
融合中心将每个Agent的置信指派作为输入,基于Dempster组合规则[17]对其进行合成。融合中心确定组合后的置信指派的辨识框架Ψf={小,较小,较大,大},因此必须把Agentd的置信指派转换为辨识框架Ψf下的置信值。令Ω:2Ψd→ 2Ψf
是从Ψd到Ψf的一个细化,在置信转换过程中,还需根据实际特点增添一些转化规则。同时,融合中心通过Dempster组合规则得出各类置信指派,决策中心能够将融合中心得到的结果作为输入,辨识框架中每个前提的概率值,由下式得到:

在能量管理多Agent系统中,通过决策得到每个状态的Pignistic概率,根据概率值的大小能够判断各系统Agent的能量状态信息[16-17]。
3 仿真分析
根据上述分析,对能量管理多Agent体系进行建模仿真。本文采用较为通用的多Agent建模软件Netlogo进行仿真分析,软件运行界面见图6。首先通过Logo语言进行编程,分别构造多Agent体系中的各系统Agent,然后分别设定各Agent初始的能量分配权重。仿真实验参数信息见表1。

图6 Netlogo软件运行界面Fig.6 Interface of Netlogo

表1 四轮驱动电动汽车参数信息Tab.1 Parameters information of 4WD EV
在UDDS工况下进行仿真,速度曲线见图7。利用Netlogo软件求解该工况下电机驱动Agent(MD Agent)、能量回收Agent(ER Agent)和低压电气Agent(LES Agent)的能量分配权重。在MATLAB/Simulink环境下,基于能量分配权重搭建功率分配控制器,并将功率分配控制器嵌入ADVISOR纯电动汽车整车模型中进行验证,对比于静态分配能量控制算法(各部件的功率分配不发生变化),仿真结果见图8~图10。

图7 UDDS工况速度曲线Fig.7 Velocity curve of UDDS condition
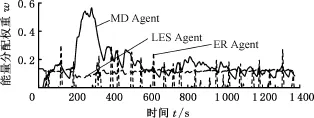
图8 能量分配权重变化曲线Fig.8 Changing curves of energydistributed weights

图9 功率与能耗对比Fig.9 Comparison of motor power and energy consumption

图10 复合电源Agent SOC值变化Fig.10 Diagram of changing SOC of compound power Agent
图8中,系统Agent的能量分配权重在整个过程中是不断变化的。电机驱动Agent的整体能耗最高,而能量回收Agent只在再生制动条件下产生一定的耗能。当电机驱动Agent需求能量较大时(200~400 s),低压电气Agent的能耗相应降低;在驱动能量需求不大的情况下,低压电气Agent能耗保持平稳。
图9所示为多Agent能量控制与静态分配能量控制的对比结果。通过功率对比可以看出,在低功率工况下两种控制的输出功率相近,在高功率工况下,多Agent能量控制的输出功率较低。通过能耗对比可知,多Agent能量控制在各个阶段的能量消耗都要小于静态分配能量控制。
图10中,动力电池SOC值Ssoc的变化较为平和,而超级电容SOC值的变化幅度较大,尤其在高功率工况下出现急剧下降的情况,表明其在高功率放电时具有更高的优先级。
4 结论
本文基于多Agent系统规则构建出适用于四轮驱动电动汽车的能量管理体系结构,并在该结构下建立能量管理多Agent数学模型,分别基于状态转移和可传递置信模型为能量管理多Agent体系搭建决策规划层,从而构成了宏观层次化、微观具体化的理论框架,并通过建模仿真分析验证了模型的正确性与合理性。本文所提出的能量管理体系结构能够为今后相关领域的研究提供一定的技术参考和理论支撑,同时为多Agent系统思想在四轮驱动电动汽车其他研究层面的应用和推广提供依据。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
陶瓷学报(2021年2期)2021-07-21
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
北京航空航天大学学报(2017年7期)2017-11-24
海外星云(2016年17期)2016-12-01
中国火炬(2015年1期)2015-07-25
车迷(2015年6期)2015-03-20
自动化博览(2014年10期)2014-02-28
汽车电器(2014年5期)2014-02-28
