一种汽车自动紧急制动系统的测试及评价方法
2018-08-10 07:28:08彭忆强甘海云丁宗恒
重庆理工大学学报(自然科学) 2018年7期
彭忆强,陈 超,甘海云,丁宗恒,熊 庆
(1.西华大学 汽车与交通学院, 成都 610039; 2.中国汽车工程研究院股份有限公司, 重庆 401122;3.四川汽车关键零部件协同创新中心, 成都 610039;4.汽车测控与安全四川省重点实验室, 成都 610039;5.天津职业技术师范大学, 天津 300300;6.流体及动力机械教育部重点实验室, 成都 610039;7.北京卡达克数据有限公司, 北京 100176)
在全球智能车辆迅速发展的背景下,电子稳定控制(electronic stability control,ESC)、防抱死制动控制(anti-lock braking system,ABS)等车辆主动安全技术已逐步向具有智能检测、控制能力的汽车智能安全技术方向发展。目前,驾驶员辅助控制(advanced driver assistance systems,ADAS)是汽车智能安全技术的代表。ADAS包括自动紧急制动控制(autonomous emergency braking system,AEBS)、偏离车道预警控制(lane departure warning system,LDWS)、自适应巡航控制(adaptive cruise control system, ACCS)、盲点监测控制(blind spot detection system,BSDS)、自动泊车控制(automatic parking system,APS)等在内的相关车载控制系统[1]。这些车载控制系统的存在可以进一步提高乘员的安全性、舒适性,也是实现汽车自动驾驶的基础。
AEBS是在汽车行驶的紧急情况下,针对追尾工况发出碰撞警告,并且自动采取紧急制动措施的一种智能安全系统,防止因驾驶员制动反应过慢而引起的碰撞安全事故的发生。AEBS的工作原理如图1所示。

图1 AEBS的工作原理
AEBS通过摄像头或雷达检测(或两者信号的融合)来识别前方的车辆,在有发生碰撞可能的前提条件下,首先通过声音和警示灯提醒驾驶员进行制动操作,防止碰撞发生。若驾驶员没有及时进行制动操作,AEBS判定追尾碰撞无法避免,就将进行主动制动来避免碰撞或降低碰撞可能性。此外,AEBS还可提供动态制动支持,若驾驶员给予的制动踏板力不足以避免碰撞,它可施加额外的制动力。
针对AEBS的测试方法及标准法规,国家智能运输标准委员会发布了智能运输系统、自适应巡航系统、车辆碰撞预警系统的性能要求和试验方法[2-3]。曹寅等[4]对国外AEBS的检测与试验方法进行了总结,归纳出AEBS的试验流程。但作为开发、检验和推广AEBS的重要方向——AEBS的测试与评价方法研究,其相关的法规或标准、测试及评价方法等研究成果却十分匮乏。
本文以国内AEBS的测试和评价方法为对象,主要进行以下研究:建立完整的AEBS测试系统;基于国内事故的情况分析,制定符合我国道路AEBS测试的工况及方法;引入层次分析法(analytic hierarchy process,AHP)搭建模型,获取判断矩阵,计算各工况权重系数,综合获得AEBS的评价方法;对某一车型的样品车进行所提工况的AEBS实地试验;分析、评价结果,定量获取得分。
1 AEBS的测试方法及原理
AEBS的测试方法主要分为2种:目标车辆静态测试与目标车辆动态测试。试验中用到的仪器与设备主要有车辆、陀螺仪(含GPS)、驾驶机器人、超平可碾压(ultra flat overrunable,UFO)机器人以及假车等。AEBS测试原理如图2所示。
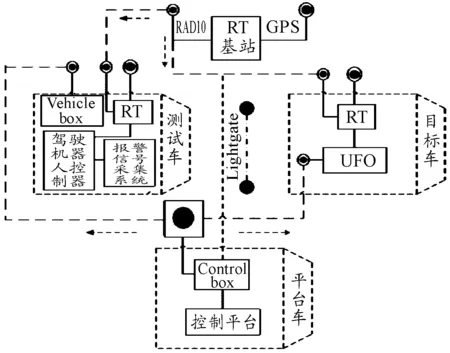
图2 AEBS测试原理示意图
AEBS静态测试时,陀螺仪布置于被测车辆中,由GPS确定车辆位置并通过RT基站的差分定位系统获取高精度的车辆位置信息。同时,通过配备的转向、制动和加速驾驶机器人,使被测车辆的车速、横向偏距等参数可被精确控制。陀螺仪通过预设的网络协议与机器人控制器相连,将被测车辆的实时位置信息发送给驾驶机器人。预警系统则通过CAN接口与机器人控制器相连,将试验中的各种警报信息实时发送给驾驶机器人。通过驾驶机器人实时收集的定位信息、报警信息等数据,即可对被测车辆的AEBS有效性进行评估。
AEBS动态测试通过获取车辆的实时参数对被测车辆与目标车辆进行控制和协调。在测试中,为保证安全,把UFO作为目标车辆,其平台用来放置、安装UFO控制器。它从RT基站接收差分信号,通过WiFi传送到目标车辆和被测车辆的“vehicle box”,这样就能分别获得目标车辆、被测车辆的定位信息,并得到车辆速度、加速度等实时运行参数。在测试中,通过对被测车辆、目标车辆相关参数的精确控制,确保两辆车之间的默契合作。同时,在UFO的后部装有一个光传感器(light gate)。被测车辆经过光传感器时会触发UFO控制器,控制器发出指令促使UFO按照预先设定的轨迹行驶以进入测试状态。
2 AEBS测试工况研究
进行AEBS测试工况的研究,必须基于我国交通事故发生的具体情况,制订符合国情的AEBS测试方法。
我国交通事故统计数据显示[5]:约15%的事故是由车辆未制动或未及时制动引起的碰撞。C-NCAP统计表明[6]:约50%的追尾事故是由前车过慢行驶而引起的。公安部事故录像进一步显示:大部分的追尾事故是由于前车突然变道而引起的。因此,在我国的道路事故中,两车之间发生偏置碰撞占比比较大。
根据上述我国发生交通事故的具体情况,本文制订了如表1所示的AEBS测试工况[7]。其中的虚警工况、人机接口测试工况属功能性测试,因此以下的评价方法研究中未涉及这两种工况。
3 AEBS测试结果评价方法研究
AEBS测试结果的评价基于2个方面: AEBS在各个工况中的表现;各个工况在评价系统中的权重。
根据现有的交通统计数据,本文建立了几种典型测试工况(如表1所示),结合层次分析法(AHP)[8-11],计算了各种工况对整个系统的评价权重。
在AHP中构建总目标和各个元素的权重关系时,可建立3个递阶层次:目标层、准则层和方案层,分别对应层次结构的目的、约束条件及详细描述。该结构从目标层开始往下支配,同层之间互不干扰。
基于AHP原理,本文建立了如图3所示的以城市道路工况为元素的AEBS测试结果评价模型。通过计算各方案层的权重系数,对某型汽车的样车进行了AEBS实车测试和评价。
表1 AEBS测试工况汇总
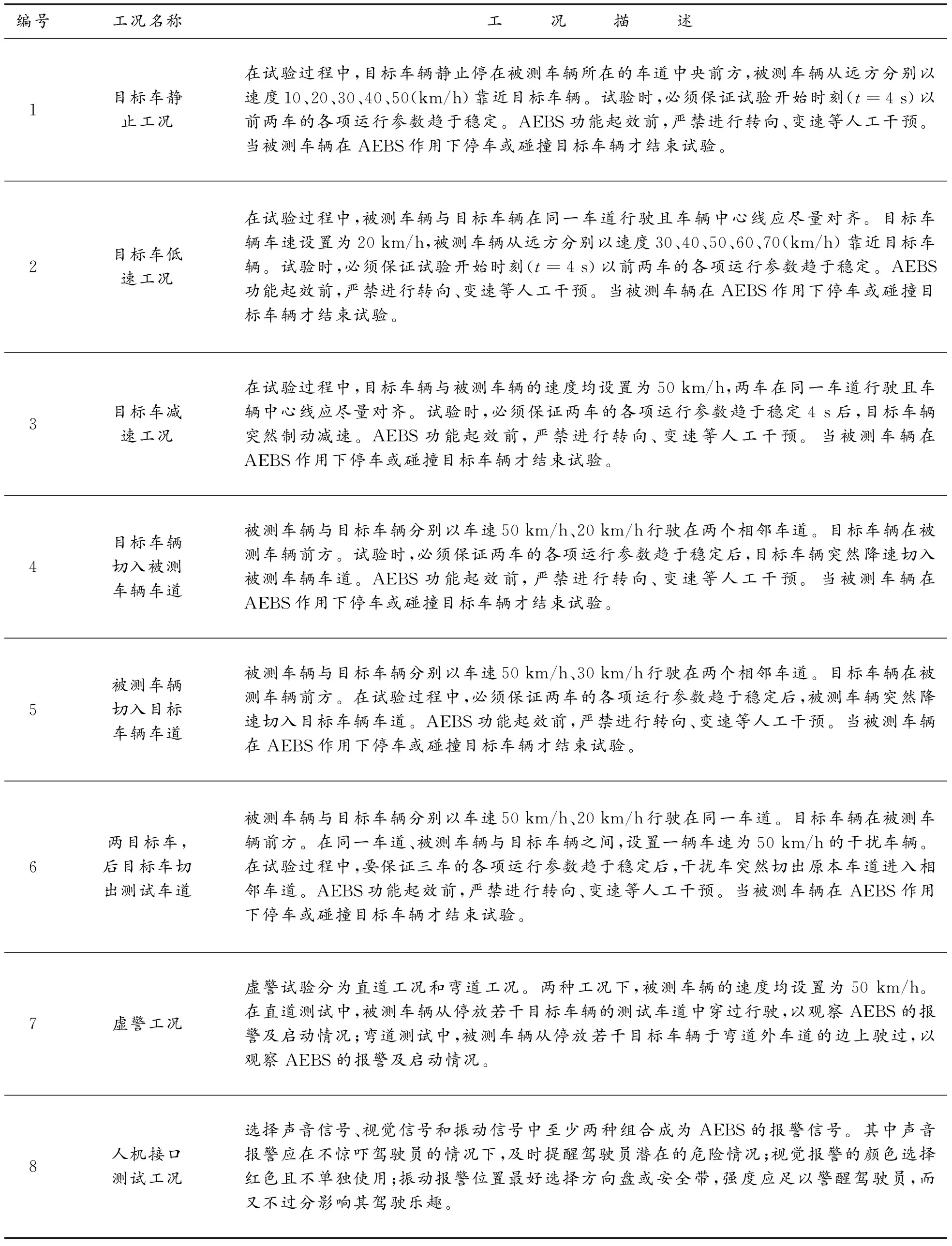
编号工况名称工 况 描 述1目标车静止工况在试验过程中,目标车辆静止停在被测车辆所在的车道中央前方,被测车辆从远方分别以速度10、20、30、40、50(km/h)靠近目标车辆。试验时,必须保证试验开始时刻(t=4 s)以前两车的各项运行参数趋于稳定。AEBS功能起效前,严禁进行转向、变速等人工干预。当被测车辆在AEBS作用下停车或碰撞目标车辆才结束试验。2目标车低速工况在试验过程中,被测车辆与目标车辆在同一车道行驶且车辆中心线应尽量对齐。目标车辆车速设置为20 km/h,被测车辆从远方分别以速度30、40、50、60、70(km/h)靠近目标车辆。试验时,必须保证试验开始时刻(t=4 s)以前两车的各项运行参数趋于稳定。AEBS功能起效前,严禁进行转向、变速等人工干预。当被测车辆在AEBS作用下停车或碰撞目标车辆才结束试验。3目标车减速工况在试验过程中,目标车辆与被测车辆的速度均设置为50 km/h,两车在同一车道行驶且车辆中心线应尽量对齐。试验时,必须保证两车的各项运行参数趋于稳定4 s后,目标车辆突然制动减速。AEBS功能起效前,严禁进行转向、变速等人工干预。当被测车辆在AEBS作用下停车或碰撞目标车辆才结束试验。4目标车辆切入被测车辆车道被测车辆与目标车辆分别以车速50 km/h、20 km/h行驶在两个相邻车道。目标车辆在被测车辆前方。试验时,必须保证两车的各项运行参数趋于稳定后,目标车辆突然降速切入被测车辆车道。AEBS功能起效前,严禁进行转向、变速等人工干预。当被测车辆在AEBS作用下停车或碰撞目标车辆才结束试验。5被测车辆切入目标车辆车道被测车辆与目标车辆分别以车速50 km/h、30 km/h行驶在两个相邻车道。目标车辆在被测车辆前方。在试验过程中,必须保证两车的各项运行参数趋于稳定后,被测车辆突然降速切入目标车辆车道。AEBS功能起效前,严禁进行转向、变速等人工干预。当被测车辆在AEBS作用下停车或碰撞目标车辆才结束试验。6两目标车,后目标车切出测试车道被测车辆与目标车辆分别以车速50 km/h、20 km/h行驶在同一车道。目标车辆在被测车辆前方。在同一车道、被测车辆与目标车辆之间,设置一辆车速为50 km/h的干扰车辆。在试验过程中,要保证三车的各项运行参数趋于稳定后,干扰车突然切出原本车道进入相邻车道。AEBS功能起效前,严禁进行转向、变速等人工干预。当被测车辆在AEBS作用下停车或碰撞目标车辆才结束试验。7虚警工况虚警试验分为直道工况和弯道工况。两种工况下,被测车辆的速度均设置为50 km/h。在直道测试中,被测车辆从停放若干目标车辆的测试车道中穿过行驶,以观察AEBS的报警及启动情况;弯道测试中,被测车辆从停放若干目标车辆于弯道外车道的边上驶过,以观察AEBS的报警及启动情况。8人机接口测试工况选择声音信号、视觉信号和振动信号中至少两种组合成为AEBS的报警信号。其中声音报警应在不惊吓驾驶员的情况下,及时提醒驾驶员潜在的危险情况;视觉报警的颜色选择红色且不单独使用;振动报警位置最好选择方向盘或安全带,强度应足以警醒驾驶员,而又不过分影响其驾驶乐趣。

图3 AEBS测试结果的评价模型
建立AHP模型后,同层元素间相对重要性的直观数值比较可用判断矩阵表示。先对各评价指标进行相互比较,再根据九分位比率进行权重排序,最后按该顺序把各指标组合成为判断矩阵。若用M、Z和F分别表示AHP(图3)的目标层、准则层及方案层。则M层相对于Z层的判断矩阵A如下:
车道变换工况下,Z层相对于F层的判断矩阵B如下:
判断矩阵中,bij代表元素i、j的相对重要性比较,且bij、bji互为倒数,即
按相关规定,bij需取9、7、5、3、1、1/3、1/5、1/7、1/9共9个标度,依次表示由重到轻的权重。表2为各标度取值的含义[12]。
表2 AHP方法各标度取值的含义

标度bij含义1bi与bj重要性相等3bi比bj稍微重要5bi比bj重要7与bj相比,bi非常重要9与bj相比,bi极其重要1/3bj比bi稍微重要1/5bj比bi重要1/7与bi相比,bj非常重要1/9与bi相比,bj极其重要
构建M层、Z层之间的判断矩阵是依据我国交通事故的统计数据。 在2011—2014年的事故统计数据中,挑选出符合以上几种测试工况的数据,如表3所示。

表3 2011—2014年的事故平均数据
据此,可得出M层相对于Z层的判断矩阵C:
求解可得C最大特征值为5.099 9,归一化特征向量为n=(0.087 8, 0.588 8, 0.138 7, 0.045 7, 0.138 9)。n中的元素分别对应目标车静止、低速、减速、车道变换及偏置等工况的权重系数。
获得M层相对于Z层的权重系数后,应依次计算Z层相对于F层的权重系数。在计算该权重系数时,不仅需要考虑速度工况,还需要考虑对应事故中的人员伤亡及财产损失。然而,AHP中每个F层之间不能存在联系,若将伤亡人数、财产损失列为F层中的元素,则不满足AHP的基本原则。因此,本文先列出各个速度工况下对应事故中的人员伤亡、财产损失情况,并计算其所占比重,最后利用AHP法得出每个Z层中各个工况的权重系数。下面笔者以目标车辆静止工况为例,详细说明其计算过程。
据我国交通事故数据统计,在前车静止时,交通事故的发生数量和伤亡人数在各种车速下的比例分布如图4所示。以图4中的数据为基础,按表4设定不同程度伤亡情况占比,根据前车静止工况中的设定车速(10、20、30、40、50 km/h)就可以计算得出各工况下综合事故的所占比例。
表4 不同程度伤亡情况占比

类型伤亡情况占比轻伤1.0重伤1.2死亡1.5
仅仅通过原始的事故统计数据并不能准确计算各种工况下经济损失的权重系数,因为它没有给出各个工况下具体的财产损失。但分析数据可知,事故导致的经济损失随车速的增加而逐步上升,由此给出一个随速度增加的线性条件,即设定Z层中每个最低速度工况的损失值为1,速度每增加1级,权重系数增加0.1。

图4 目标车静止工况下事故数量和伤亡人数在各种车速下的比例
综上,采用AHP方法可计算得出目标车静止工况下Z层相对于F层的权重系数,如表5所示。

表5 方案层(F)元素的权重系数
安全性是AEBS考虑的首要问题,故本文给予表5中伤亡人数(与安全性密切相关)最大的权重,为0.6,其他两项权重均取0.2。加权计算F层的比例如表6所示。
表6 方案层(F)的加权比例

车速/(km·h-1)所占比例/%104.22011.43023.34027.15034.0
构建Z层相对F层的判断矩阵D为:
求解可得D最大特征值为5.091 8,归一化向量为n=(0.069 3, 0.146 4, 0.363 5, 0.432 4, 0.809 1),即10、20、30、40、50 km/h等工况的权重系数分别为0.038 1、0.080 4、0.199 6、0.237 5、0.444 4。
采用同样的方法,可以分别得出其他几个工况下Z层对于F层的权重。目标车低速工况下,Z层相对于F层权重系数为0.098 93、0.098 93、0.283 8、0.518 3;目标车减速工况下,Z层相对于F层权重系数为0.125、0.375、0.125、0.375;变换车道工况下,Z层相对于F层权重系数为0.333、0.333、0.333;目标车偏置工况下,Z层相对于F层权重系数为0.027 4、0.049 9、0.117 1、0.129 5、0.208 1、0.468。
据此,可分别对M层相对于Z层、Z层相对于F层的判断矩阵进行一致性检验[7]。检验结果表明:各个判断矩阵具有良好的一致性,能用于AEBS性能评价。
4 实车测试及评价
为进一步验证上述方法的有效性,对某A级豪华样车进行了AEBS实车测评。测试天气条件如下:没有降雨、降雪、冰雹等恶劣天气情况;测试温度范围为0~45 ℃;测试时最大风速低于10 m/s。测试场地条件如下:干燥的沥青路面,没有可见的潮湿处;峰值附着系数大于0.9;直道并且平坦。以下以目标车静止工况为例,详细说明具体测评过程。
在目标车静止工况下,选择测试范围为260 m,被测车辆从x=0 m出发,碰撞点设置在x=260 m。图5为被测车辆速度为10 km/h的测试结果。
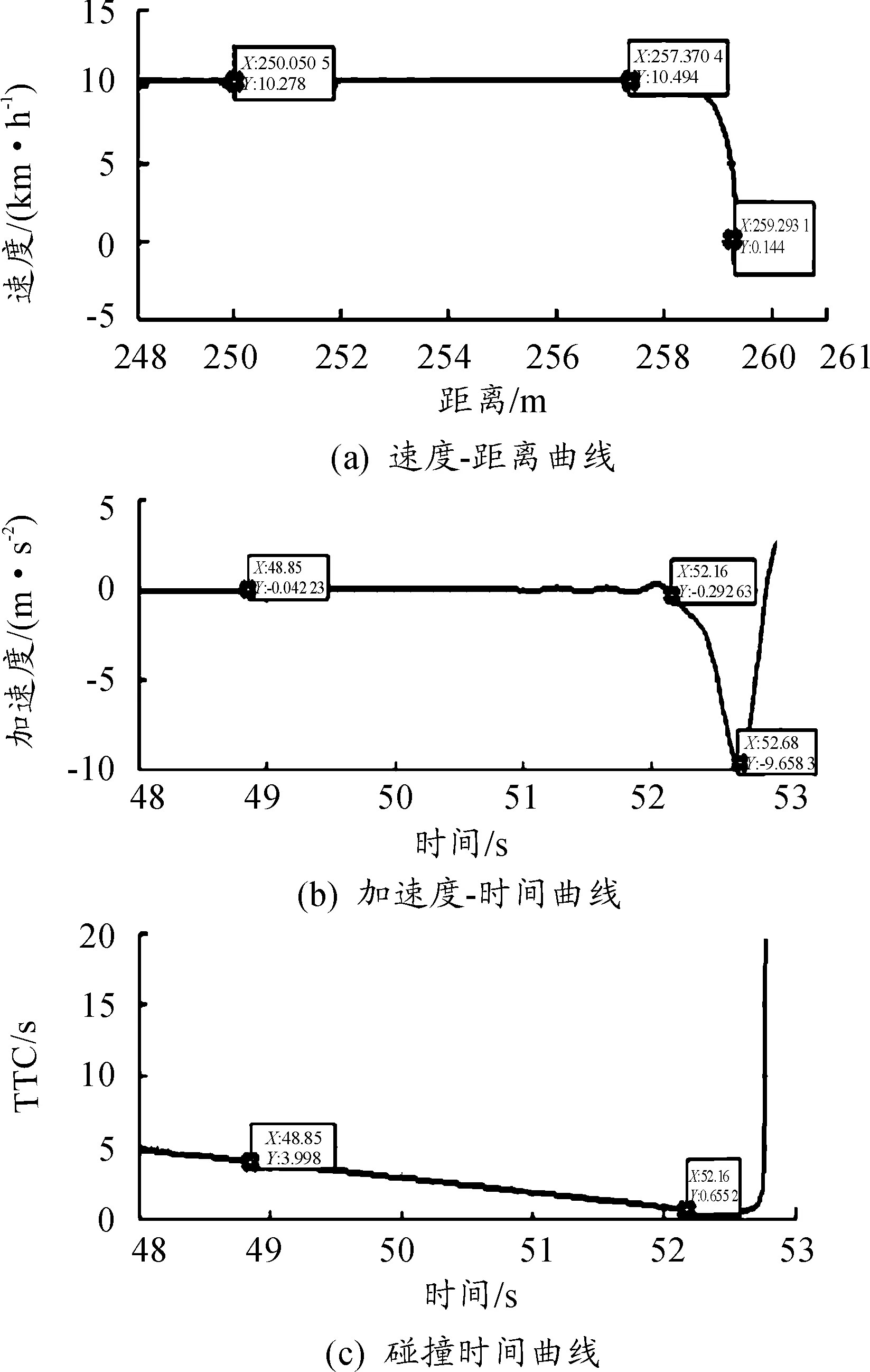
图5 10 km/h车速工况下的测试结果
图5中:第1个标记点为AEBS测试的开始时刻;第2个标记点为AEBS生效时刻;若存在第3个标记点,则表示被测车辆的刹停时刻。由图5可知:在10 km/h车速工况下,AEBS能刹停被测车辆,避免碰撞。结果如表7(a)所示。
图6为被测车辆速度为20 km/h时的测试结果。
图6标注与图5相同。由图6可知:在20 km/h车速工况下,AEBS也能及时刹停被测车辆以避免碰撞。结果如表7(b)所示。
图7为被测车辆速度为30 km/h时的测试结果。
图7标注与图5相同。由图7可知:在30 km/h车速工况下,被测车辆在AEBS作用下也能避免碰撞。结果如表7(c)所示。
图8为被测车辆速度为40 km/h时的测试结果。
图8标注与图5相同。由图8可知:在40 km/h车速工况下,AEBS未能及时刹停被测车辆,导致被测车辆与目标车辆碰撞。结果如表7(d)所示。
图9为被测车辆速度为50 km/h时的测试结果。
图9标注与图5相同。由图9可知:在50 km/h车速工况下,AEBS也未能及时刹停被测车辆,被测车辆与目标车辆碰撞。结果如表7(e)所示。
采用以上的测试方法,分别实现了目标车低速工况、减速工况、车道变换工况、偏置工况的测试,并获得了相应的测试结论。同时,完成了AEBS系统的声光报警策略测试,以及被测车辆AEBS系统的一致性测试。
表7 10~50 km/h车速工况的测试结果

工况评价指标测试结果(a) 10 km/hAEBS生效时刻0.66 sAEBS产生的最大减速度9.6 m/s2相对碰撞速度0车辆相对距离(试验结束后)0.7 m(b) 20 km/hAEBS生效时刻0.77 sAEBS产生的最大减速度9.4 m/s2相对碰撞速度0车辆相对距离(试验结束后)0.8 m(c) 30 km/hAEBS生效时刻0.78 sAEBS产生的最大减速度10.9 m/s2相对碰撞速度0车辆相对距离(试验结束后)0.84 m(d) 40 km/hAEBS生效时刻1.20 sAEBS产生的最大减速度10.11 m/s2相对碰撞速度6.6 km/h车辆相对距离(试验结束后)碰撞(e) 50 km/hAEBS生效时刻1.42 sAEBS产生的最大减速度11.3 m/s2相对碰撞速度24.57 km/h车辆相对距离(试验结束后)碰撞

图6 20 km/h车速工况的测试结果

图7 30 km/h车速工况的测试结果

图8 40 km/h车速工况的测试结果

图9 50km/h车速工况的测试结果
依据权重系数,首先计算各个Z层的总分数,并联合AEBS试验结果,计算各个F层的得分:
F层得分 =(车速减少量÷两车相对车速)×
(10×Z层的权重系数)×F层的权重系数
(6)
进行AEBS系统的声光系统报警策略测试以及测试车辆的AEBS系统的一致性测试,通过则各加1分。因此,所测试样品车的评价结果如表8所示。从表8可见,该车型样品车的AEBS系统最终评价得分为8.473 4分(总分10分),性能良好。
表8 评分结果

序号测试类型测试工况得分总得分1目标车静止10 km/h20 km/h30 km/h40 km/h50 km/h0.033 4520.070 5910.175 2490.174 1180.198 4470.6522目标车低速40 km/h50 km/h60 km/h70 km/h0.582 5000.399 4011.022 2431.536 8293.5413目标车减速40 m/2 m·s-240 m/6 m·s-212 m/2 m·s-212 m/6 m·s-20.065 0160.249 6600.130 0310.065 0160.5104变换车道目标车切入目标车切出测试车切入0.152 1810.152 1810.152 1810.4575目标车偏置10 km/h20 km/h30 km/h40 km/h50 km/h目标车20 km/h0.038 0590.069 3110.162 6520.179 8760.213 7820.650 0521.3146声光系统报警策略测试1.01.0007一致性测试同速一致性不同速一致性0.50.51.000最终得分8.473
5 结束语
通过分析我国道路交通事故基本数据,提出了适合我国城市道路车辆AEBS的多种不同测试工况及方法。
利用AHP方法搭建了各种工况下的层次模型,确立了各层次间的判断矩阵,并获得了AEBS评价所需的权重系数。
完成了某型汽车样车的AEBS测试,获得了多种工况下的试验结果。经过数据处理及分析,获得了样品车的评价结果:所采用的测试及评价方法具有可操作性;所得出的结论具有合理性;若加以完善,后期可以作为一种通用的方法进行推广。
下一步工作将从2个方向展开:一方面,将进一步增加工况,如考虑交叉路口及行人的影响,以便更加全面地描述和评价汽车AEBS的性能; 另一方面,将在相关参数敏感性分析的基础上,采用诸如模糊逻辑的处理方式,以提高评价的客观性。
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
当代陕西(2020年17期)2020-10-28 08:18:18
人大建设(2018年5期)2018-08-16 07:09:00
汽车维护与修理(2018年1期)2018-04-04 01:13:22
电信科学(2017年6期)2017-07-01 15:44:57
中国交通信息化(2015年10期)2015-06-06 06:39:31
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33