
气吸式育苗穴盘自动摆放机的设计与试验
2018-08-10 10:58:10刘海彬谷新运崔永杰
农机化研究 2018年9期
刘海彬,谷新运,徐 灿,崔永杰
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
0 引言
工厂化穴盘育苗是设施农业的重要组成部分,生产中大量使用的育苗穴盘,通常简称穴盘[1-3],我国多采用聚苯乙烯吸塑穴盘[2]。现阶段我国农业劳动力不足的问题日益突出,迫切需要实现农业的机械化和自动化,提高劳动生产率[4]。
穴盘自动播种机、自动播种生产线需要摆放育苗穴盘,草莓育苗过程中幼苗从小盘移栽到大盘的环节也有摆放育苗穴盘的需求[5-6]。育苗穴盘的摆放工作枯燥费时,劳动强度大,有必要实现机械化和自动化。现阶段仅少数机型能实现吸塑育苗穴盘的自动摆放[7]。
气力吸取技术在气吸式播种机中广泛使用,通常采用真空发生器和真空泵等真空元件[8-9]。此外,其他农业装备中也经常应用气力吸取方法,除用于播种外,还可用于嫁接装备[10]、番茄采摘末端执行器[11],以及植物组培苗的拾取[12-13]等。真空吸盘在其他行业中也有广泛使用[14]。
现阶段,低成本的吸塑育苗穴盘在我国仍广泛使用,能实现其自动摆放的机型互有优劣却没有在国内广泛应用。因此,有必要开展相关研究,探索新的育苗穴盘自动摆放方式,研制适用的育苗穴盘自动摆放机。本研究针对国内工厂化穴盘育苗中常用的50穴育吸塑苗穴盘,使用穴孔边界区域无圆孔的穴盘。
1 总体结构与工作原理
1.1 总体结构
气吸式育苗穴盘自动摆放机包括摆放装置、机架(含盘箱)、供盘输送带和控制系统4部分,如图1所示。
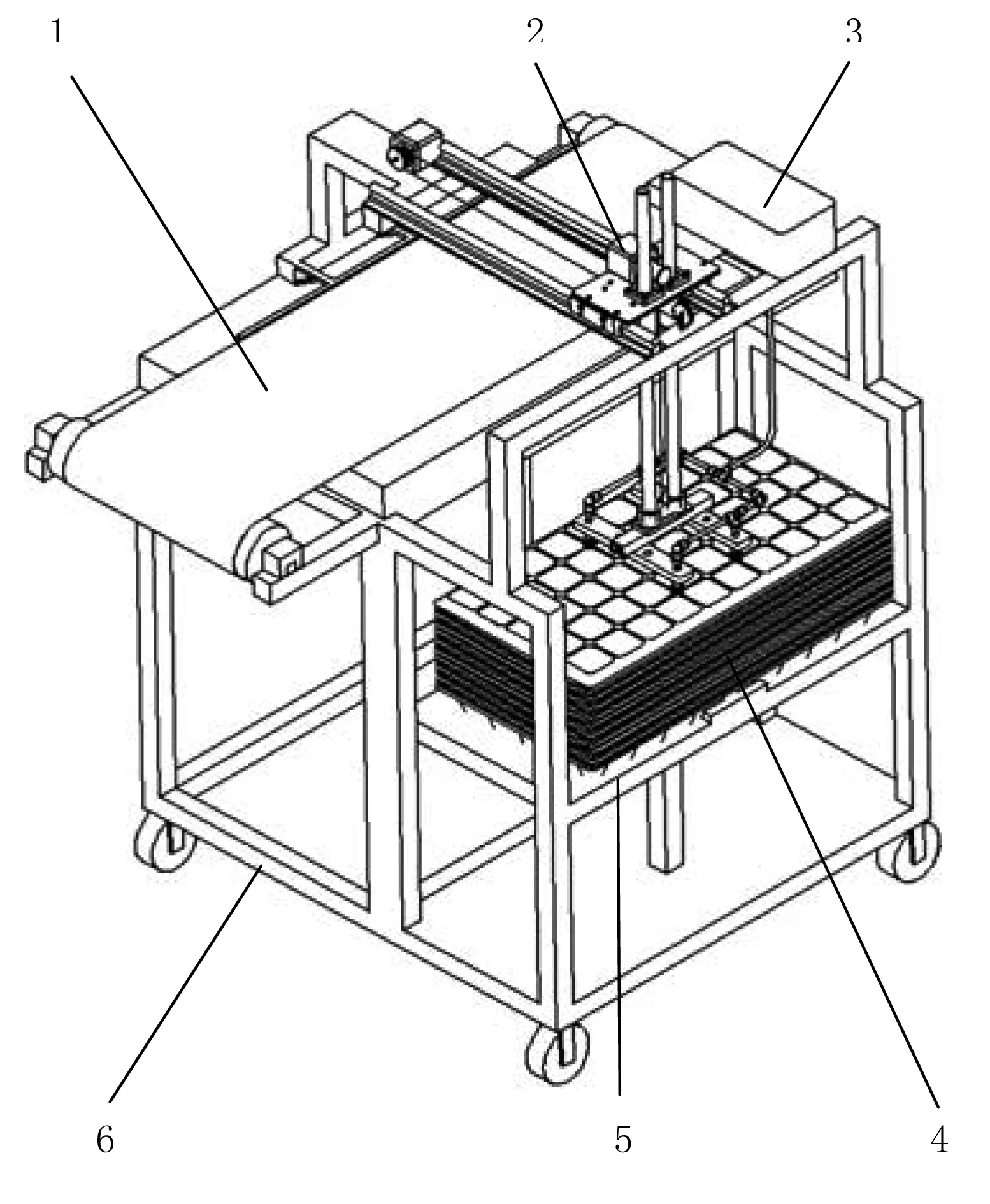
1.输送带 2.摆放装置 3.控制箱 4.育苗穴盘 5.盘箱 6.机架
其关键部件结构如图2所示。其中,摆放装置由真空取盘装置和运动装置组成;运动装置以一对步进电机为执行元件,水平方向采用绳轮机构,竖直方向采用尼龙绳索和卷扬筒。

1.真空取盘装置 2.导向杆 3.尼龙绳索 4.运动装置 5.水平绳索 6.步进电机一 7. 步进电机二 8.卷扬筒 9.控制箱 10.从动绳轮 11.气动管 12.育苗穴盘
1.2 工作原理
摆放机工作原理:首先将待摆放的育苗穴盘置于盘箱中,接通电源后摆放机自动复位,输送带转动;按启动键后摆放机开始工作,运动装置先带动真空取盘装置运动至盘箱上方,再竖直下降至真空吸盘吸附到最上层的育苗穴盘上,吸附位置为育苗穴盘穴孔的边界区域。真空取盘装置吸取最上层的穴盘一起上升至复位高度,再沿轴支轨运动至输送带上方,将穴盘摆放到输送带上,由输送带输送给播种机;之后进入下一个工作循环,如此循环往复直至完成盘箱中全部穴盘的摆放工作。当盘箱中的穴盘不足10张时,控制系统会发出提示信号,提醒使用者补充穴盘或及时关机。
2 关键部件设计
2.1 真空取盘装置设计
真空取盘装置主要由气压回路和吸盘架组成,如图3所示。气压回路由DC24V ZQ370-02PM真空泵、真空破坏阀、空气滤清器、真空压力表、真空吸盘、气动管,以及气压快速接头组成。吸盘架上有导向杆连接件,与一对导向杆连接为一个整体,卷扬筒上的尼龙绳索也固定在连接件上。吸盘架上共有8个真空吸盘安装孔。相邻的两个真空吸盘安装孔纵向中心距为51.5 mm;横向中心距为103 mm。试验中可将真空吸盘安装在不同的安装孔,调整吸附位置。真空吸盘通过吸盘座同真空吸盘安装板及气动管连接,吸盘座分为弹簧缓冲型和无缓冲型两种类型。
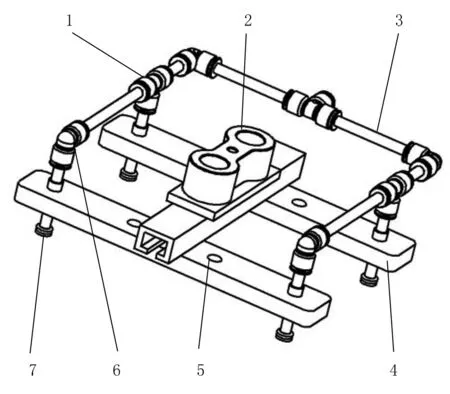
1.三通快速接头 2.导向杆连接件 3.气动管 4.吸盘架 5.真空吸盘安装孔 6.直角快速接头 7.真空吸盘
2.2 运动装置设计
运动装置实现真空取盘装置在水平方向和竖直方向两个自由度的运动,均以步进电机为执行元件。水平方向的运动由主动绳轮、从动绳轮、尼龙绳索、轴支轨及开口型直线滚动轴承实现。竖直方向的运动由卷扬筒、尼龙绳索、导向杆及法兰型直线滚动轴承实现。
绳轮机构如图4所示,运动部件结构如图5所示。一对开口型直线滚动轴承由安装板连接为一个整体,与一对平行安装的轴支轨配合使用,公称直径为12 mm。主动绳轮随步进电机一转动;从动绳轮由尼龙绳索带动,改变绳索上拉力的作用方向;尼龙绳索两端均固定在安装板上;开口型直线滚动轴承和安装板等零部件组成的水平运动部件在尼龙绳索的牵引下可以随步进电机一的正反转沿轴支轨往复运动。

1.从动绳轮 2.尼龙绳索 3.轴支轨 4.直线滚动轴承 5.安装板 6.从动绳轮
安装板上装有一对公称直径16mm的法兰型直线滚动轴承,与一对外径16mm、内径14mm的06Cr19Ni10不锈钢导向杆配合使用。步进电机二安装在安装板上,其轴上装有卷扬筒,卷扬筒使用尼龙绳索工作。导向杆下端与真空取盘装置连接为一个整体,沿法兰型直线滚动轴承在竖直方向往复运动,上升时由卷扬筒上的尼龙绳索牵引。
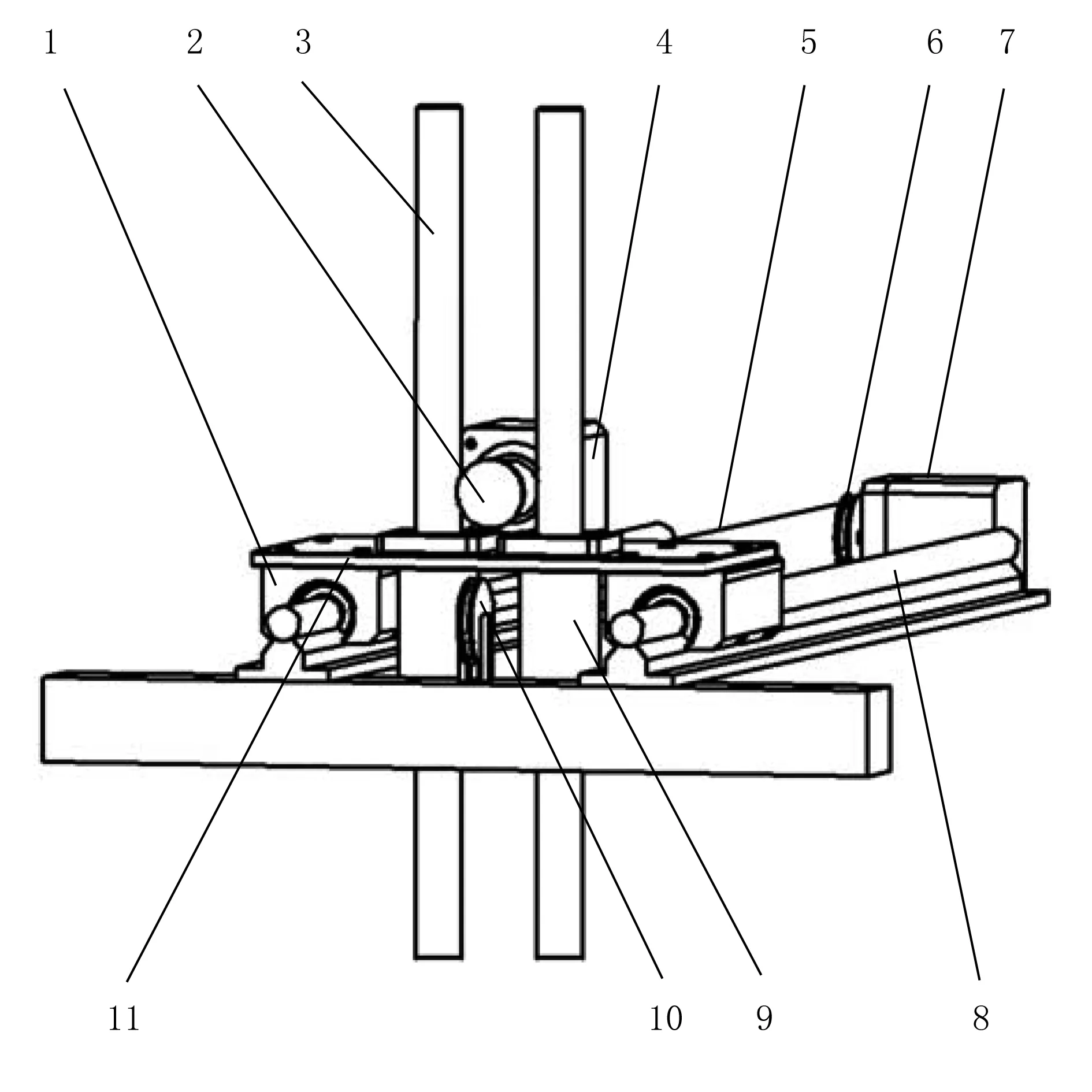
1.开口型直线滚动轴承 2.卷扬筒 3.导向杆 4.步进电机二 5.水平绳索 6.主动绳轮 7.步进电机一 8.轴支轨 9.法兰型直线滚动轴承 10.从动绳轮 11.安装板
2.3 控制系统设计
摆放机控制系统结构如图6所示。选用STC89C52RC单片机为控制芯片,单片机I/O口通过继电器控制真空泵的启动和停止。真空破坏阀为两位两通电磁开关阀,使用24V直流电源,同样由单片机I/O口通过继电器控制。

图6 控制系统结构图
摆放机以选用HSTM42-1.8-S-33-6-0.95两相42步进电机为运动部件的执行元件,选用ZD-6209-V2C驱动器与之配套使用。水平方向的运动由步进电机一带动绳轮正反转实现,竖直方向的运动由步进电机二带动卷扬筒正反转实现。竖直方向运动的行程随着盘箱中剩余的育苗穴盘数量的减少而增加,使用一对CHE18-30NA-B710光电开关检测真空取盘装置的行程:一个安装在吸盘架上,用于控制下降行程;另一个安装在水平运动部件上,用于控制上升行程。水平方向运动行程固定,由一对安装在轴支轨两端的行程开关检测运动部件的位置。
摆放机使用RAD50CM对射式光电开关检测输送带上有无穴盘,当穴盘被输送带输送给播种机时摆放下一张穴盘。摆放机控制系统使用CHE18-30NA-B710光电开关实时监测盘箱中是否有足够数量的育苗穴盘。当盘箱中剩余的育苗穴盘数量不足10张时,引起传感器输出信号变化,控制系统会发出提示信号,提醒使用者及时补充育苗穴盘或及时关机。控制系统软件使用C语言编写。电源开关接通电源后运动部件自动复位;按下启动开关后摆放机开始工作。
3 正交试验
3.1 试验目的
为了确定摆放机工作参数,确定真空泵供电电压、吸盘间距及是否使用吸盘座缓冲弹簧,开展正交试验。
3.2 试验材料与方法
试制气吸式育苗穴盘自动摆放机样机一台,如图7所示。
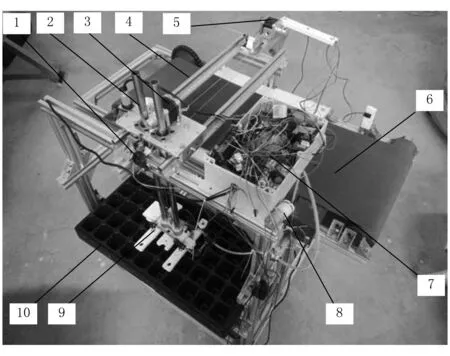
1.从动绳轮 2.导向杆 3.步进电机二 4.轴支轨 5.步进电机一 6.输送带 7.控制箱 8.真空泵 9.真空取盘装置 10.育苗穴盘
50穴育苗穴盘25张(清洗后的旧盘,循环使用)、安泰信APS3005Dm可调直流稳压电源1台。为便于试验中调节电压,使用安泰信APS3005Dm可调直流稳压电源为真空泵供电,样机控制系统其他部分不变。
按照表1所示的试验因素水平开展三因素二水平正交试验,试验共4组。试验中,若运动部件完成一个工作循环后,育苗穴盘被输送带输送至下一工序则视为摆放成功;以25个工作循环为1次试验,每组试验重复4次,统计各次试验中的摆放成功率。
3.3 试验结果与讨论
正交试验所得结果如表2所示,方差分析结果如表3所示。结果表明:该试验条件下吸盘间距、吸盘座缓冲弹簧、真空泵供电电压3个因素对摆放成功率的影响均不显著。
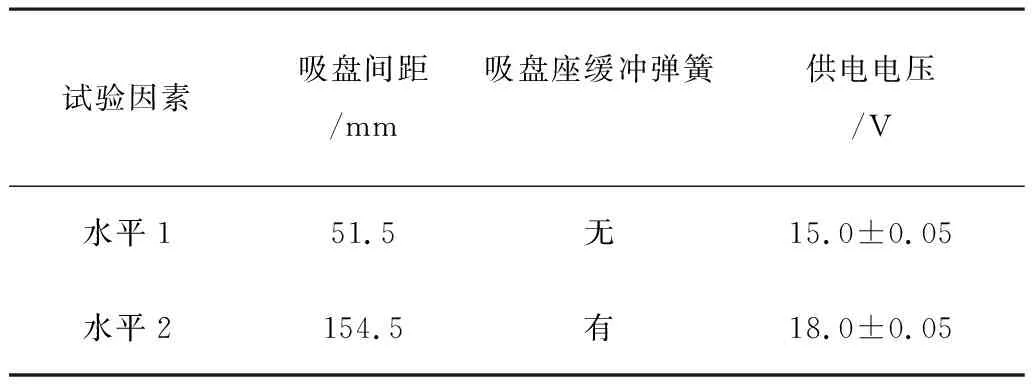
表1 试验因素水平表

表2 正交试验结果

表3 正交试验方差分析
F0.95(1,3)=10.13,F>10.13为显著。
1)使用4个真空吸盘时,不论吸盘间距大小,育苗穴盘受力均衡,不会因侧偏或晃动导致摆放失败。因此,吸盘间距对摆放成功率的影响不显著。从简化机械结构、减小吸盘架尺寸的角度考虑,应当选用较小间距(51.5mm)。
2)因三层风琴型真空吸盘能起到缓冲作用,所以吸盘座缓冲弹簧对摆放成功率的影响不显著。为减少质量,应当选用无缓冲弹簧吸盘座。
3)真空泵供电电压(15.0±0.05)V时,4个真空吸盘提供的吸力仍大于育苗穴盘的重力,故在此试验水平下真空泵供电电压对摆放成功率的影响不显著。鉴于真空泵额定电压为24 V,供电电压(15±0.05)V时泵的转速明显下降,故选择供电电压为(18.0±0.05)V。
4 验证试验
4.1 试验目的
为验证正交试验结果和样机的工作能力,开展验证试验。
4.2 试验材料与方法
气吸式育苗穴盘自动摆放机样机1台(见图7)、50穴育苗穴盘25张(清洗后的旧盘,循环使用)。
试验采用如下参数:吸盘个数为4个,使用直径9mm三层风琴型真空吸盘,横向间距103mm,纵向间距51.5mm,吸盘座无缓冲弹簧,真空泵供电电压为(18.0±0.05)V。
试验中, 若运动部件完成一个工作循环后,育苗穴盘被输送带输送至下一工序则视为摆放成功。每组100个工作循环,重复5组。试验中使用25张50穴育苗穴盘,每组为盘箱补充穴盘4次。统计各组试验中摆放机工作的成功率。
4.3 试验结果与讨论
试验结果如表4所示。5组试验共补充穴盘20次,共摆放500次,仅第4组和第5组中各因尼龙绳索从卷扬筒脱出失败一次,平均成功率99.6%。

表4 试验结果
试验结果表明:样机使用4个直径9mm的三层风琴型真空吸盘,在ZQ370-02PM真空泵供电电压(18.0±0.05)V的条件下,可实现50穴育苗穴盘的自动摆放。
试验中摆放失败两次,均因为尼龙绳索从卷扬筒脱出。其原因是检测下降行程的光电接近开关受环境光照影响,探测距离变化。因此,应当改进对下降行程的控制方法,防止尼龙绳索脱出。
5 结论
设计了气吸式育苗穴盘自动摆放机并试制了样机,可实现50穴育苗穴盘的自动摆放。给定的试验条件下,吸盘间距、吸盘座缓冲弹簧、真空泵供电电压3个因素对摆放成功率的影响均不显著。 在真空泵供电电压(18.0±0.05)V的条件下,使用4个9mm三层风琴型真空吸盘,摆放500次,摆放成功率为99.6%。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:32
水泵技术(2022年2期)2022-06-16 07:08:18
散文诗世界(2022年1期)2022-01-13 00:47:13
四川蚕业(2020年3期)2020-07-16 08:09:42
造纸信息(2019年7期)2019-09-10 11:33:18
孩子(2019年7期)2019-07-29 05:37:20
当代陕西(2019年10期)2019-06-03 10:12:42
蔬菜(2016年8期)2016-10-10 06:49:04
压缩机技术(2014年4期)2014-03-20 15:55:42
吉林地质(2014年4期)2014-03-11 16:48:12
