
增程式电动拖拉机驱动系统设计
2018-08-10 09:27赵静慧徐立友刘恩泽刘孟楠
农机化研究 2018年11期
赵静慧,徐立友,刘恩泽,刘孟楠,孟 涛
0 引言
传统拖拉机作业油耗和排放较高,难以满足未来农业发展新业态和农机发展新要求[1-2]。电动拖拉机能够实现零污染、零排放,然而,采用单一能量系统的电动拖拉机,其续航能力难以满足较大功率拖拉机的持续作业要求。因此,可以采用柴电增程器来改善电动拖拉机的续航能力,并通过对能量系统施加主动控制策略,降低整机的燃油消耗率。
目前可实现电动拖拉机增程的研究成果主要有:南京农业大学的张超等针对太阳能园艺拖拉机驱动系统进行了匹配设计与性能分析[3];河南科技大学的徐立友等针对串联式混合动力拖拉机驱动系进行了设计研究[4];Florentsev等针对农用拖拉机机电传动系统进行了相关研究[5]。然而,采用太阳能和串联式混合能量系统依然存在能量供给不稳定和混合度较低的可能性。
本文以东方红132.3kW拖拉机为研究对象,提出了一种增程式电动拖拉机(ERET)设计方法,以期为研究较大功率段电动拖拉机提供一定的理论参考。
1 增程式电动拖拉机驱动系统功率流
图1为增程式电动拖拉机驱动系统结构方案。由图1可知:动力电池、柴油机-发电机、驱动电机、变速器、主减速器、差速器及轮边减速器构成了车辆动力系统的基本组件,动力电池、柴油机-发电机、驱动电机之间为电功率交互,驱动电机、变速器、主减速器、差速器、轮边减速器之间采用机械连接。

图1 ERET驱动系统方案Fig.1 Scheme of ERET drive systems
ERET能量系统存在双能量源,分别为动力电池和由发动机/发电机组成的增程器。其驱动系统存在3种工作模式,分别为纯电动模式、增程模式及停车充电模式。不同工作模式下的功率流情况如图2所示。
当动力电池荷电状态(SOC)较高时,ERET工作于纯电动模式仅由动力电池为驱动电机提供电能,其功率流如图2(a)所示;当蓄电池SOC低于SOC下阈时,ERET工作于增程模式,发动机-发电机启动向蓄电池提供电能;能量流如图2(b)所示,当ERET蓄电池SOC较低且停止作业时,可以为蓄电池充电,此时为停车充电模式,仅由蓄电池获得电能,其功率流如图2(c)所示。

(a) 纯电动模式

(b) 增程模式

(c) 停车充电模式图2 ERET动力系统功率流Fig.2 Power flow of ERET drive systems
2 驱动系统设计
通常以拖拉机主要配套农机具在常用工况条件下的平均牵引阻力来确定额定牵引力FTM,考虑工况条件及农机具性能变化所引起的阻力变化因素,应该留有10%~20%的储备。在农业生产中,犁耕工况是拖拉机最基本且负载较大的工况,额定牵引力的确定应首先满足犁耕工况的要求,即
FTM=(1.1~1.2)·Fgx
(1)
Fgx=nk·b1·hk·k
(2)
其中,FTM为拖拉机的额定牵引力(kN);Fgx为拖拉机犁耕工况下的平均阻力(kN);nk为犁铧数;b1为单个犁铧宽度(cm);hk为耕深(cm);k为土壤比阻(kN/cm2)。
增程式电动拖拉机驱动系统要满足拖拉机不同作业项目的功率需求,首先应满足额定牵引力的要求,利用牵引电机在低速范围内具有恒转矩的特性,以拖拉机进行犁耕作业时最大设定速度作为确定额定功率的依据,计算牵引电机机功率PT,即
(3)
其中,PT为牵引电机额定功率(kW);V1为犁耕作业的最大速度(km/h);ηt为牵引效率。
根据相应功率段传统拖拉机进行犁耕作业时对应挡位下柴油机最高转速确定增程式电动拖拉机牵引电机额定转速ne。本文以东方红1804拖拉机为实例,采用其III挡或IV挡以最大速度进行犁耕作业时的柴油机最大转速确定牵引电机额定转速,即
(4)
(5)
其中,ne3为柴油机在拖拉机处于III挡时的转速(rad/s);ig3为东方红1804拖拉机变速器III挡传动比;i0为东方红1804拖拉机主减速器传动比;iL为东方红1804拖拉机轮边减速器传动比;rq为东方红1804拖拉机驱动轮半径。ne4为柴油机在拖拉机处于IV挡时的转速(rad/s);ig4为东方红1804拖拉机变速器IV挡传动比。
牵引电机的额定转矩Te为
(6)
采用前期研究中提出的电动拖拉机变速器设计方法计算增程式电动拖拉机各挡传动比[4]。根据拖拉机工作特点将其分为作业模式和行驶模式:作业模式应根据电动机低速大转矩的特点来进行设定变速器速比,这里按其负荷率来确定,设置3个档位,负荷率分别为100%(重载)、85%(中载)、70%(轻载);行驶模式应工作在电动机的高转速恒功率区,设定其负荷率为55%,重载时,牵引电机应有较高的效率,故在进行变速器速比选择时,应使电动机工作在额定转速附近。增程式电动拖拉机变速器传动比为
(7)
in=ζni1
(8)
其中,i1为Ⅰ 挡传动比;in为各挡传动比;ζn代表各挡负荷率,分别取ζ2=0.85,ζ3=0.7;ζ4=0.55。
3 能量系统设计
动力电池作为REET的主能量源,既要保证车辆的动力性,又要提供一定的纯电动续驶里程。需满足
(9)
其中,Cp为由功率确定的动力电池容量(A·h);h为最大放电率(h-1);Um为动力系统直流母线电压(V);ηmc为牵引电机效率与控制器效率的乘积;PA为拖拉机附件消耗功率(kW)。
动力电池要保证REET以V1匀速行驶的纯电动续驶里程d1,需满足
(10)
其中,CE为由能量要求确定动力电池容量(A·h);DOD为动力电池的放电深度;ηc为拖拉机总传动效率;ηb为动力电池放电效率;ηa为拖拉机附件能量消耗比例系数;δ为驱动轮滑转率;d1为拖拉机纯电续驶里程(km)。
根据式(9)、式(10)制定动力电池容量取值规则为
C=min{max[Cp(h),CE(h)]}
(11)
其中,h为放电率(h-1);C为动力电池容量(A·h)。
柴油机和发电机组成的增程系统应在动力电池出现故障不能工作时,保证拖拉机以一较低速度进行犁耕作业。增程系统的标定输出功率为
(12)
其中,PRE为增程器的标定功率(kW);vmin为犁耕工况行驶速度的下限。
4 结构参数计算
最大使用重力应满足拖拉机工作在所属工况时,在滑转率不超过规定值的情况下能够发挥出额定牵引力,即
(13)
其中,Mmax为拖拉机最大使用质量(kg);φσ为滑转率为规定值时的土壤附着系数;λqN为驱动轮的载荷系数;f为滚动阻力系数。
重心位置即重心到驱动轮轴的水平距离为
a=0.2L+0.4hT+0.01Rf+0.04Rr
(14)
其中,L为ERET轴距(m);hT为挂钩高度(m);Rf为前轮半径(m);Rr为后轮半径(m)。
基于以上理论,参照实例机型,设计增程式电动拖拉机的主要技术参数如表1所示。

表1 ERET主要技术参数Table 1 Main parameters of ERET
5 仿真分析
设置仿真工况如图3所示。其中,0~447s为犁耕工况,447~650s为行驶工况。

图3 仿真工况Fig.3 Work condition used in the simulation
为验证所设计的拖拉机的动力性,基于前期开发的增程式电动拖拉机仿真平台[6],对ERET的动力性、经济性和牵引特性进行仿真验证,并与传统拖拉机进行对照分析。
图4为增程式电动拖拉机爬坡性能;图5为主要作业挡位下东方红132.3kW拖拉机爬坡性能。对比可知:ERET最大爬坡度为39.69%,传统机型最大爬坡度为37.4%,其动力性有所提升。

图4 增程式电动拖拉机爬坡性能Fig.4 Climbing performance curves of ERET

图5 东方红180马力拖拉机爬坡性能Fig.5 Climbing performance curves of YTO-180hp tractor
图6为增程式电动拖拉机不同档位牵引特性曲线;图7为东方红180马力拖拉机主要作业挡位牵引特性曲线。对比可知:ERET的最大牵引力为60.9kN,东方红1804的最大牵引力为58.4kN,其最大牵引力提高了4.3%。

图6 增程式电动拖拉机牵引特性Fig.6 Traction performance of ERET

图7 东方红180马力拖拉机牵引特性Fig.7 Traction performance of YTO-180hp tractor
为了验证拖拉机的燃油经济性,采用发动机启停+定点能量管理策略对增程式电动拖拉机的燃油消耗率进行仿真验证。其中,发动机启停控制为:当蓄电池SOC低于蓄电池的下限SOCL时,发动机启动;当蓄电池SOC高于蓄电池的上阈SOCH时,发动机关闭;当动力SOC介于蓄电池上阈与下阈之间时,发动机保持原来的状态。发动机启停控制策略如图8所示。
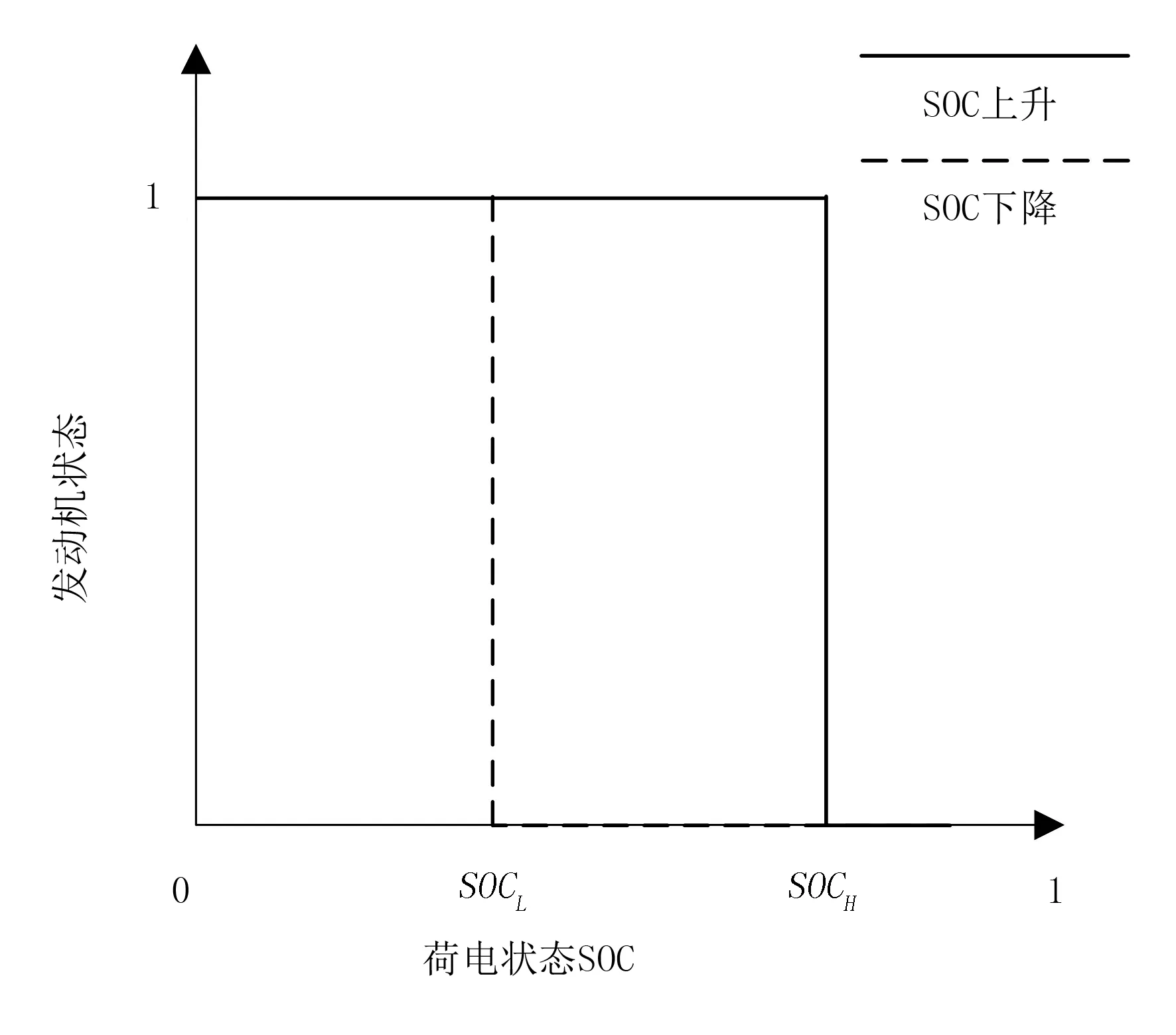
图8 发动机启停控制策略Fig.8 Engine start-stop control strategy
定点能量管理策略为:当发动机启动时,发动机以恒功率工作。仿真结果如图9所示。

图9 燃油消耗率对比情况Fig.9 Comparison of the fuel consumption rate
由图9可知:在图3设定工况下,增程式电动拖拉机的综合油耗为2.99L/km,东方红1804拖拉机的综合油耗为3.16L/km,其经济性可提升5.37%。
6 结论
1)制定了增程式电动拖拉机驱动系统方案,提出了驱动系统主要部件参数的设计方法。
2)以东方红1804为实例,通过计算其整机参数、牵引电动机参数、增程式能量系统参数、结构参数及传动系统参数,设计了增程式电动拖拉机驱动系统。
3)基于AVL CRUISE平台,采用定点能量管理策略,对照传统机型,分析了增程式电动拖拉机主要性能。其中,最大爬坡度提高6.12%,最大牵引力提高4.3%,经济性提高了5.37%。
猜你喜欢
卫星应用(2022年4期)2022-05-27
汽车工程师(2021年11期)2021-12-21
军民两用技术与产品(2021年10期)2021-11-25
北京第二外国语学院学报(2021年2期)2021-08-13
防爆电机(2021年1期)2021-03-29
军民两用技术与产品(2021年10期)2021-03-16
汽车零部件(2020年7期)2020-08-03
大众科学(2020年4期)2020-07-24
汽车实用技术(2019年9期)2019-05-15
汽车实用技术(2018年15期)2018-08-29
