
智能模式识别采摘机器人设计
2018-08-10 09:27叶凤华
农机化研究 2018年11期
叶凤华
(广东工业大学,广州 510090)
0 引言
情感计算最早于20世纪80年代末就开始产生了,并且由Yale大学的老教授在分析了相关参数后,开辟性地将情感计算这一全新的领域展现在了人们面前。随着对情感计算的不断深入和延伸,该概念随后被戈尔曼演化成为新一层次的概念,其研究成果公布于世后在全球范围内刮起一股情感计算风,计算机智能方向掀起了学术研究的热潮。采摘机器人是近年来在农业作业过程中开始使用的一种先进的智能化农机设备,由于我国采摘作业设备起步较晚,其智能化功能并不完善,并且使用的数量也较少。为了使机器人具有更加智能的自动化作业能力,且在农业作业中进行推广,可以结合当前先进的情感计算技术,使机器人具有类人的作业能力,从而提高采摘作业的准确率和效率,对于提升农业的作业水平,降低人工作业的强度具有重要的现实意义。
1 情感计算人机交互模型及其在采摘机器人控制系统中的应用
情感计算从某种角度来说,是一类经典的最科学模式进行分析整合识别的过程,采用情感计算推理模式在理论上可以使农机智能作业设备对环境做出反应,使其自主地完成导航行走和作业。但在实际作业过程中,智能设备要想完成自主作业并不简单,其难度在于需要对变化的进行实时的分析,像人类情感一样对信息做出及时和恰如其分的反应,从而实现自主化作业过程。随着计算机和信息技术的不断进步,更加智能化的采摘机器人被应用到了农业作业过程中,如采摘机器人,如图1所示。

图1 智能自主作业采摘机器人Fig.1 Intelligent autonomous operation picking robot
图1所示是美国加州蔬果研究委员会和华盛顿苹果委员会共同研发的一款自主作业的机器人,在采摘过程中,机器人首先通过视觉系统对环境进行扫描,得到一幅关于采摘作业环境的数字化地图;然后利用图像分析系统准确地定位苹果的具体位置,并智能化地判断苹果的成熟程度。该型采摘机器人的研发大大提高了采摘的成功率,提高了采摘的作业效率。
采摘机器人的智能化程度主要依赖于其像人类一样的情感计算能力,在面对实际的采摘作业环境时,可以对环境做出反应,自主判断需要作业的方位,并判断哪些作物需要采摘,哪些作物不需要采摘。
2 采摘机器人智能识别模式模糊聚类算法
采摘机器人在对环境进行智能判断和响应时,可以采用基于情感计算的图像聚类和模糊算法,以提高其对复杂环境数据的处理效率。当前,智能化计算模型大部分采用分布式的计算方法,分布式计算的数据来源并不统一,利用计算机系统得到的情感模块需要借助于机器语言进行表达,并采用编程技术高效的执行机器语言,这是情感计算智能识别模式设计的重点。
AML(Avatar Markup Language)是一种基于XML的多形式脚本语言,该语言的结构简单,易于理解,并且各种软件对该语言的兼容性较好,利用该语言可以成功地实现采摘作业环境因素的情感的表达。
实现采摘机器人的智能化仅仅采用简单的机器语言是远远不够的,还需要借助于智能算法。其中,模糊c均值聚类算法(FCM)便是一种很好的智能算法模型,其步骤也较为简单。该算法可以对数据进行智能化分类,其依据主要是采集数据的隶属度,是对硬c均值聚类(HCM)方法的一种改进,最早由Bezdek提出的。
FCM算法采用模糊分组的方法,将n个向量Xi(i=1,2,…,n)分为c组,并求每组的聚类中心,隶属矩阵u允许有取值在0,1间的元素,通过归一化规定,一个数据集的隶属度的和总等于1,其表达式为

(1)
则可以得到FCM的目标函数为
(2)
其中,ci表示模糊组I的聚类中心;dij=‖ci-xj‖为第I个聚类中心与第J个数据点间的欧几里德距离,且m∈[1,∞)是一个加权指数。通过构造如下新的目标函数,可求得使式(2)达到最小值的必要条件,则
(3)
其中,λj,j=1到n,是式(1)的n个约束式的拉格朗日乘子。对所有输入参量求导,使式(2)达到最小的必要条件为
(4)
(5)
假设采集到的农作物环境分类数据集合为X={x1,x2,…,xN},其中每一个数据集合xk有n个特性指标,设为Xk={x1k,x2k,…,xNk}T,从而把X分成c类进行模式识别。
3 基于聚类和模糊控制的采摘机器人智能模式识别测试
为了验证聚类和模糊控制算法在采摘机器人智能模式识别中的作用,以温室机器人为例,对算法进行了验证,并通过编程的方式将算法嵌入到了机器人控制系统中,如图2所示。

图2 采摘机器人实验过程Fig.3 The experimental process of picking robot
在温室光线较差的环境,利用采摘机器人的智能模式识别方法进行采摘作业试验,在模式识别时,采用了智能聚类算法对果实颜色进行分类,如图3所示。
图3 果实聚类图像模式识别Fig.3 The fruit clustering image pattern recognition
试验中,可以采用聚类算法对农作物的果实进行识别,识别的方式主要可以通过颜色来区别,将绿色枝叶和红色的果实区分开,为采摘机器人目标追踪提供技术支持。
如表1所示,采用智能模式识别算法后,在不同的测试过程中都得到了较高的模式识别准确率,从而验证了算法的可行性,将其使用在农作物颜色识别系统中,会产生非常好的效果。

表1 模式识别准确率测试Table 1 The accuracy test of patterm recognition %
如表2所示,为了验证模糊聚类算法在采摘机器人控制系统中使用的优越性,将其和不同算法表现出来的性能进行对比,由表2对比结果可知:本次选用的聚类模糊算法在算法准确率和计算效率上都具有突出的优势。
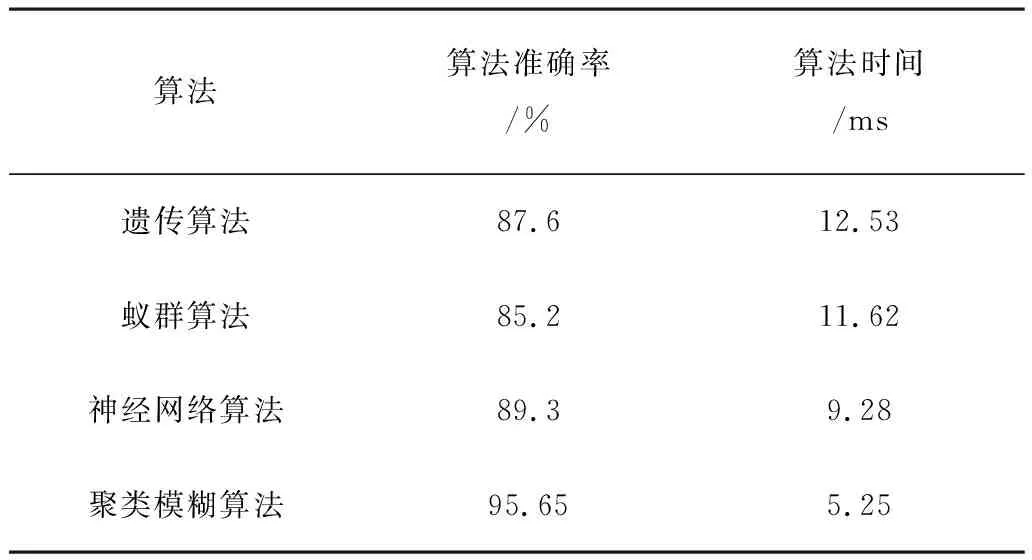
表2 不同智能算法对比Table 2 The comparison of different intelligent algorithms
4 结论
为了提高采摘机器人的智能化程度,结合情感计算原理和方法,将模糊聚类算法嵌入到了机器人智能识别模式中,得到了一种采摘机器人自适应类人作业设计的新方法。利用该方法,采摘机器人的视觉系统和数据处理系统实现了环境信息的采集和模糊聚类,通过聚类可以有效地判断果实的方位和成熟程度,最后决定是否采摘,整个过程实现了无人化操作。最后,对该方法进行了验证,由采摘机器人作物颜色的判断和算法的效率与准确率试验结果表明:该方法可以有效的提高采摘机器人采摘的准确率和效率,对于提高采摘机器人自适应能力和自动化作业水平具有重要的意义。
猜你喜欢
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
铁道通信信号(2019年6期)2019-10-08
中国交通信息化(2018年5期)2018-08-21
中成药(2017年10期)2017-11-16
雷达学报(2017年6期)2017-03-26
互联网天地(2016年1期)2016-05-04
现代计算机(2016年17期)2016-02-28
燕山大学学报(2015年4期)2015-12-25
