
2BMJ-3A型基于机采棉的智能精量播种机设计与试验
2018-08-10 09:27张爱民李明军陈长林
农机化研究 2018年11期
张爱民,李明军,谢 庆,李 伟,陈长林
(1.滨州市农业机械化科学研究所,山东 滨州 256600;2.农业部南京农业机械化研究所,南京 210014)
0 引言
全程机械化是棉花生产的根本出路[1],在棉花生产全程机械化的过程中,最基本的要求就是能够实现棉花的机械化采摘[2]。在我国,三行采棉机既可以在田块面积较大的新疆地区使用,又可以在田块面积相对较小、种植密度大的黄淮海地区使用;同时三行采棉机的工作效率要远高于两行采棉机,而价格要低于五行、六行采棉机[3],因此三行采棉机在我国的应用十分广泛。机采棉对于行距的要求十分严格,需要76cm等行距种植[4],而棉花一膜三行等行距种植模式符合机采棉对于行距的要求,是一种高产、轻简的种植方式[5]。
在棉花生产全程机械化的配套机械中,棉花播种机的研发是重点。在棉花播种机的研发过程中,首先,要坚持农机农艺充分融合;其次,研发机具必须利于抢农时,也就是能同时完成多个工序,尽量减少机具进地次数,起到保墒效果;最后,棉花对播种质量的要求比较高,播深必须控制在1~3cm,过深过浅都不利于棉花的发芽出苗,种床要求下实上虚,也就是棉种要播在实地上[6]。
根据上述棉花的播种要求,结合国内采棉机的使用现状及棉花一膜三行等行距种植模式的优点,项目组研发了2BMJ-3A型基于机采棉的智能精量播种机。该播种机针对三行采棉机进行设计,经生产试验考核,其各项技术参数、性能指标,均达到了设计要求。
1 总体结构及工作原理
1.1 总体结构
2BMJ-3A型基于机采棉的智能精量播种机主要由机架、划行器、平行四连杆仿形机构、肥箱、种箱、施肥开沟器、播种开沟器、指夹式排种器、平地限深轮、镇压轮、展膜滚子、覆土滚筒、覆土圆盘,以及开沟圆盘等部件组成,如图1所示。

1.机架 2.肥箱 3.种箱 4.平行四连杆仿形机构 5.覆土滚筒 6.覆土圆盘 7.边膜覆土圆盘 8.开沟圆盘 9.指夹式排种器 10.播种开沟器 11.划行器 12.施肥开沟器 13.平地限深轮图1 智能精量播种机结构简图Fig.1 Structure diagram of intelligent precision seeder
1.2 工作原理
播种机工作时,采用三点悬挂方式与拖拉机连接,通过拖拉机牵引进行播种作业。机组前进时,平地限深轮将地表压平,以方便覆膜作业;施肥开沟器、播种开沟器开沟,排肥器由电机带动,排种器由镇压轮带动,分别实现播种机的施肥和播种功能;镇压轮进行种床镇压;开沟圆盘开沟,地膜两侧由压膜轮压入由开沟圆盘开好的沟内,覆土圆盘将一部分土翻入地膜沟中,经膜上镇压轮压实,另一部分土翻入覆土滚筒内,覆土滚筒内的导土板将土输送到滚筒的漏土口,使土覆在地膜上。播种机配备的智能监控系统对播种、施肥进行实时监控,自动分析下种、下肥情况,出现问题能够及时报警,避免重播(施)、漏播(施),实现了精准播种、施肥,达到了节种、节肥目的。
2 关键部件的设计
2.1 施肥开沟器的设计
施肥开沟器通过U形卡安装在播种机机架前下横梁上,为了更好地进行施肥,避免出现施肥开沟器开沟犁头磨损太快、开沟阻力大、开沟开出的土过早回落、易被杂草、残膜缠绕等问题[7],项目组设计的施肥开沟器如图2所示。
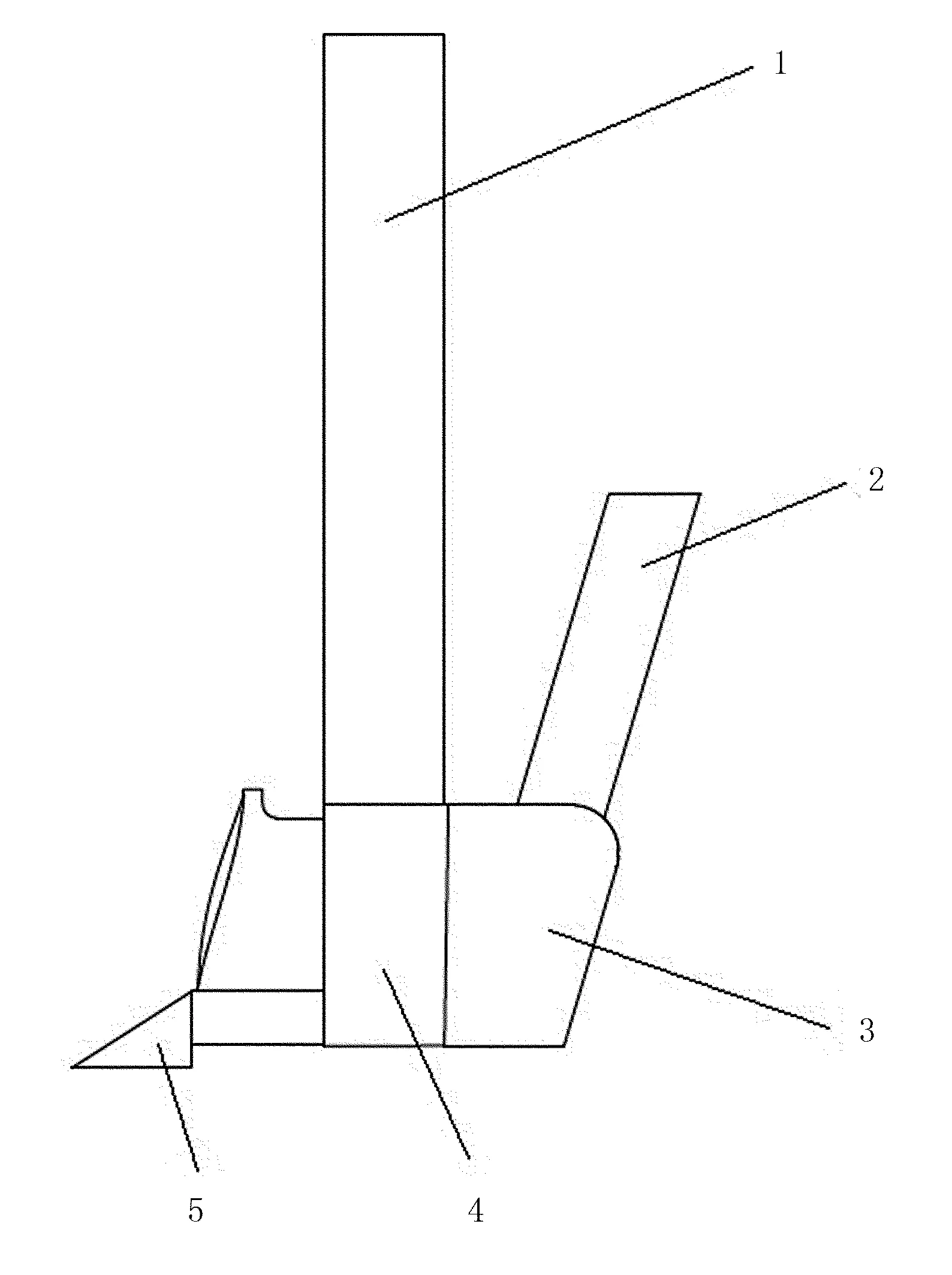
1.矩形管 2.圆形导肥管 3.开沟器大侧板 4.开沟器小侧板 5.开沟犁头图2 施肥开沟器结构简图Fig.2 Structure diagram of fertilizer opener
施肥开沟器开沟犁头由耐磨材料加工而成,可单独拆卸,方便更换;开沟器侧板能有效防止开出的土壤过早地滑落到肥沟内,其结构简单、经济可靠,能够满足棉花施肥的要求。
2.2 棉花精量播种装置的设计
本装置是一种具有单体仿形、一级传动、智能报警及播种镇压功能的棉花单粒精播机构,与播种机机架的前横梁紧固联接,构成整机。该机构主要由弧形四连杆部件、智能报警指夹式排种器部件及同心圆一级传动系统组成,解决了在不平地面上作业时深浅不一致的问题,达到各行播种一致性的技术要求。该机构利用同心圆理论,实现了一级传动,作业时该机构调整播种深度时链条长度不变,对排种器的传动更为可靠,提高了播种深度一致性、穴距一致性及单粒率等各项性能指标。其结构示意图如图3所示。
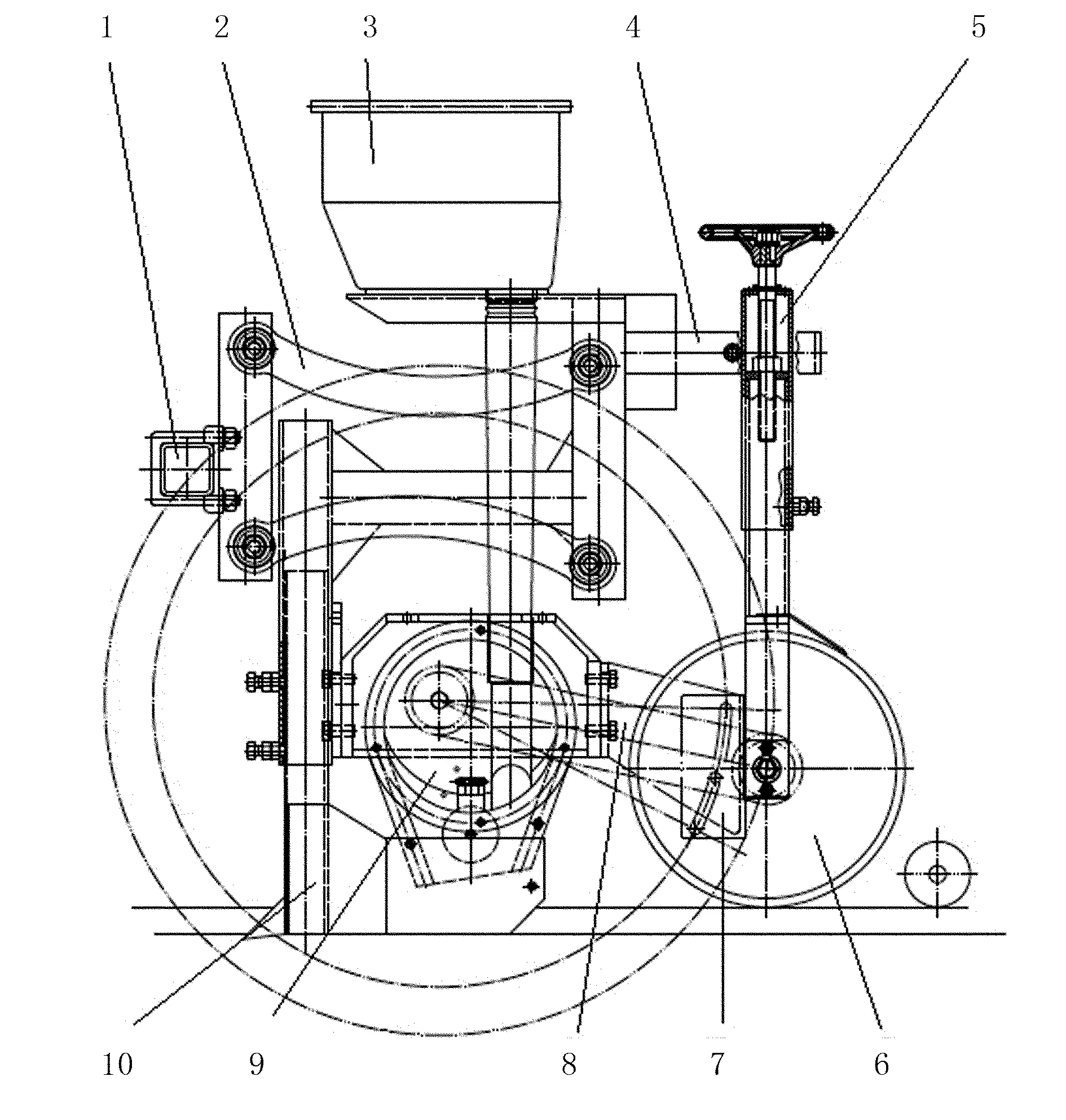
1.机架前横梁 2.平行四连杆机构 3.种箱 4.镇压轮总成连接板 5.镇压轮总成 6.镇压轮 7.同心圆轨道板 8.轨道板连接板 9.指夹式排种器 10.播种开沟器图3 棉花精量播种装置示意图Fig.3 Structure diagram of cotton precision seeding device
根据同心圆理论,在镇压轮两轮叉前下方设计有同心圆轨道板,同心圆轨道板上设计有同心圆弧形槽,固定支架上有两个控制弧形槽上下调整运动轴销,镇压轮总成上端有一个铰链销轴;在上、下调整改变播深时,由于同心圆弧槽在定位控制销的约束下,使地轮与排种器轴距离不变,传动链条长度也不变,因此传动更为可靠。
2.3 播种开沟器的设计
播种机采用的播种开沟器是改进型尖角式开沟器,主要由开沟犁头、开沟器侧板及矩形管等组成,如图4所示。该开沟器开沟犁头由耐磨材料加工而成,可单独拆卸,方便更换,有较好的入土能力,开沟阻力小,且能切断土壤中的残根,开沟动土量小,沟底平整,播幅较窄。经大田试验验证,其播深一致性好,出苗均匀。开沟器侧板不仅能有效防止开出的土壤过早地滑落到种沟,而且还能增强该播种机在大风环境下的作业效果,使得土层不混乱,下层可保证为湿土,与平行四连杆仿形机构配合使用开出的种沟深度一致,能够满足棉花播种的要求。

1.开沟犁头 2.开沟侧板 3.矩形管图4 播种开沟器结构简图Fig.4 Structure diagram of furrow opener
2.4 长度伸缩可调划行器的设计
播种机配备了北斗导航自动驾驶系统,保证行驶的直线性,同时保证76cm等行距。
由于北斗导航系统价格较高,现阶段推广较为困难,为解决这一问题,项目组设计了长度伸缩可调的划行器,配备了划行器之后,驾驶员可以根据划印来驾驶拖拉机,保证棉花为76cm等行距播种。
机采棉播种采用梭行行走法,需要左右各安装一个划行器,以驾驶员右前轮对行时计算为例,计算划行器臂长[8]。驾驶员以拖拉机右前轮对行时,划行器的左臂长L左、右臂长L右,计算公式为

(1)

(2)
式中L左—划行器左臂长;
L右—划行器右臂长;
x—播种机两处外开沟器的距离;
y—拖拉机前轮中心线间距;
a—行距。
已知该播种机两处外开沟器的距离x=1.52m,约翰迪尔5-850拖拉机前轮中心线间距y=1.63m,行距a=0.76m,将上述数值分别带入式(1)、式(2)中,经计算得:L左=2.335m ,L右=0.705m。
当以中心对行时,左右臂长相等,则
通过使用划行器,行距的一致性能够得以保证。
3 相关参数计算
3.1 动力配置验算
使用测功设备对机组行走消耗功率进行实测并与播种、镇压的估算消耗功率相加得N1=14kW,考虑到会出现意外的超负荷现象,机组必须有一定的动力储备,动力储备功率为N2=5kW,所以播种机的消耗功率为N=N1+N2=19kW。
该播种机的动力由约翰迪尔5-850拖拉机提供,动力输出功率为53.69kW,满足播种机作业功率的需求,且具有充足的功率储备。
3.2 机具的重心位置分析
机组在工作位置时,经测量,有关参数如图5所示。

G1.化肥质量;G2.种子质量;G3.机架及平地限深轮质量; G4.散件质量;G5.展膜滚子质量;G6.覆土滚筒质量图5 机具重心位置示意图Fig.5 Structure diagram of the center of gravity of the machine
机具的重心位置可用式(3)进行计算,即
(3)
由实际测量可得,G1=100kg,G2=10kg,G3=170kg,G4=75kg,G5=25kg,G6=105kg,将上述数值带入式(3)中,得机具的重心位置X=898.7mm。
3.3 纵向稳定性的校核
悬挂机组对拖拉机稳定性的影响程度,可用稳定储备系数λ来判断[9],λ可由式(4)计算得出。机组稳定性校核示意图如图6所示。
(4)
式中G使—机具使用质量;
b—机具重心与拖拉机后轮的水平距离;
W—拖拉机质量;
a—拖拉机重心与后轮的水平距离。
其中,拖拉机重心与后轮的水平距离a为
(5)
式中L—拖拉机轴距;
N1—前轮质量分配;
W—拖拉机重量。
约翰迪尔5-850拖拉机轴距L=2 200mm,前轮质量分配N1=1 700kg,加配重约翰迪尔5-850拖拉机质量W=3 050kg,将上述数值带入式(5)中,得拖拉机重心与后轮的水平距离a=1 226mm;
机具使用质量G使=485kg,机具重心与拖拉机后轮的水平距离b=1 220mm,加配重约翰迪尔5-850拖拉机质量W=3 050kg,拖拉机重心与后轮的水平距离a=1 226mm,将上述数值带入式(4),得λ=0.16。为使机具能够稳定工作,λ的范围为λ≤0.4,故该拖拉机机组稳定性安全可靠。

图6 机组稳定性校核示意图Fig.6 Structure diagram of unit stability check
3.4 机具所需提升力分析
1)已知约翰迪尔5-850拖拉机下悬挂点后610mm处可提供最大提升力为16.8kN[10]。
2)由图5可知,机具总质量约为3.75kN,下悬挂点至机具重心距离X=898.7mm。
3)根据以上参数可知,3.75kN×898.7mm<16.8kN×610mm,故提升力安全可靠。
3.5 排种器悬挂梁的校核
根据排种器悬挂梁的情况,画出受力图[11],如图7所示。

图7 悬挂梁受力图Fig.7 Structure diagram of the force of the suspension beam
其中,排种器单体重力:G=600N。
由平衡条件可知,约束反力为FO1=FO2=(G+G+G)/2=3G/2=900N。
下面开始求弯矩,由于O1、O2对称,所以只求O1、A、B点即可。
A点的弯矩为MA=3G/2×O1A=166.5N·m;B点的弯矩为MB=3G/2×O1B-G×AB=394.5N·m。
根据计算,得出排种器悬挂梁几个重要点的弯矩图,如图8所示。
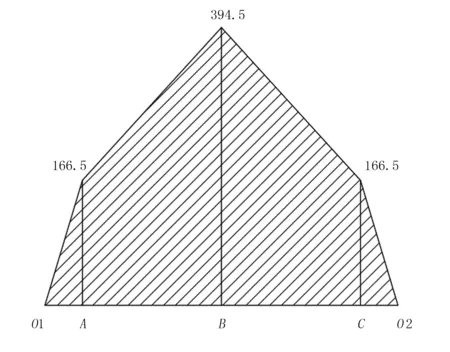
图8 梁上各点弯矩图Fig.8 Structure diagram of the bending moment of each point on the beam
总转矩:T=TO1+TA+TB+TC+TO2=0
排种器单体升起90°后对梁产生弯矩,则TA=TB=TC=600N×300mm=180N·m。
端点转矩:TO1=TO2=270N·m,TO1与TO2大小相等,方向相同;TO1A=TO1=270N·m;TAB=TO1-TA=270-180=90N·m。
BC段的扭矩与AB段相同,只是正负号相反;CO2段的扭矩与O1A段相同,只是正负号相反。扭矩图如图9所示。

由于M2>M1,所以B点处截面为危险截面。




图9 梁上各点扭矩图Fig.9 Structure diagram of torque at each point on the beam
4 机具检验
2016年4月,项目组在无棣县西小王乡对2BMJ-3A型基于机采棉的智能精量播种机进行了作业试验,试验情况如图9和图10所示。试验结果表明:播种机作业顺畅,播深一致性好,覆膜平整,实现了单粒精播,出苗率高。

图10 2BMJ-3A型基于机采棉的智能精量播种机大田作业Fig.10 2BMJ-3A type intelligent precision seeding machine based on technology of harvesting cotton by cotton-picker is working in the field

图11 棉花播后出苗及棉苗生长情况Fig.11 Seedling emergence and growth of cotton seedlings after sowing
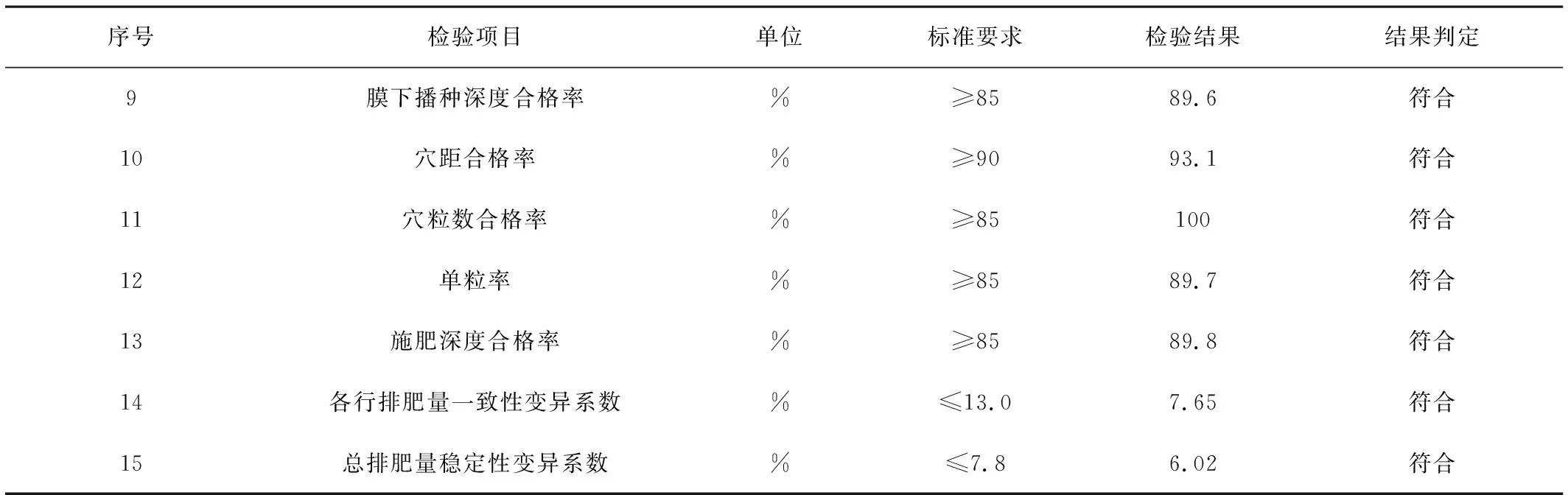
2016年5月,山东省农业机械产品质量监督检验站在滨州市滨城区秦皇台乡王家村对2BMJ-3A型基于机采棉的智能精量播种机进行了检验,检验结果如表1所示。

表1 2BMJ-3A型基于机采棉的智能精量播种机检验结果Table 1 Inspection result of 2BMJ-3A type intelligent precision seeding machine based on technology of harvesting cotton by cotton-picker
续表1
数据出自山东省农业机械产品质量监督检验站检验报告W201605097。
5 结论
1)2BMJ-3A型基于机采棉的智能精量播种机针对三行采棉机进行设计,采用一膜三行等行距种植模式,一次进地可完成种床碎土、侧深施肥、种床镇压、精量播种、覆土镇压、宽幅覆膜及膜后覆土等工序,减少了机具的进地次数,工作效率高,与单项作业相比,减少了棉农的生产成本。
2)对播种机关键部件进行了设计:施肥开沟器的设计,避免了开沟犁头磨损太快、开沟阻力大、土过早回落到沟内、易被杂草及残膜缠绕等问题;棉花精量播种装置的设计,利用同心圆理论,实现了一级传动,解决了在不平地面上作业时深浅不一致的问题;播种开沟器的设计,有较好的入土能力,开沟阻力小,能切断土壤中的残根;长度伸缩可调划行器的设计,保证播种行距的一致性。
3)田间试验表明:该播种机显著提高播种质量,各项指标均达到设计要求。
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
农业工程学报(2022年6期)2022-06-27
农业工程学报(2022年6期)2022-06-27
新疆农机化(2022年1期)2022-03-02
农机质量与监督(2021年9期)2021-12-27
农机科技推广(2021年3期)2021-08-02
果农之友(2021年4期)2021-06-29
天津农林科技(2020年5期)2020-10-21
农机化研究(2019年1期)2019-12-21
农机化研究(2018年8期)2018-07-10
