新型果园挖穴施肥机的设计研究
2018-08-10 09:22苗维平
农机化研究 2018年10期
苗维平
(沈阳理工大学,沈阳 110159)
0 引言
随着我国果园果树行业规模化、机械化的栽培与种植的发展,为了适应其较高的园艺要求及产能要求,最大限度地发挥肥料效力,相关学者对果园的挖穴施肥机具不断改善与优化,设计出可满足不同地区、不同土壤要求的挖穴施肥机具。为此,笔者从果园挖穴施肥机的机械构件组成入手,优化设计了关键零部件装置,并融入电路自动控制理念,从精准、定量、控制方向展开研究。
1 施肥机总体设计
果园挖穴施肥机整机主要由行走装置、开挖装置、施肥装置及覆土装置4个部分组成,如图1所示。


1.动力装置 2.肥料装置 3.升降装置 4.工具箱 5.连接杆 6.手轮 7.支架 8.排肥轮 9.排肥装置 10.挖穴装置 11.行进机构
工作原理可以简要概述为:在电源及主控系统控制之下,电机驱动传动机构带动行走机构开始行进,同时触发挖穴装置进行挖土作业,核心部件为螺旋钻头;挖穴完成后,刀具上升,施肥装置在预先设定好的程序控制之下,肥料通过施肥通道进行定量施肥作业,之后进行均匀覆土操作。由此挖穴施肥机完成一次自主施肥。
2 关键部件设计
2.1 挖穴与施肥装置
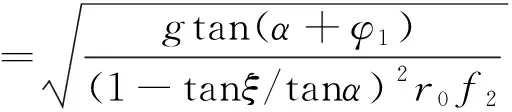
此新型果园挖穴施肥机的核心部件设计在于挖穴部分与施肥部分的高效结合及准确衔接。针对挖穴机构部件,主要根据挖穴钻头与土壤之间的相互作用力,通过构件挖穴理论分析进行设计优化。土壤单元质点在螺旋钻头的匀速运动过程中呈螺旋面上升运动趋势,结合挖穴钻头提升土壤的特征,得出钻头的临界运动速度为
(1)
式中g——重力加速度;
α——螺旋升角;
φ1——作业时摩擦角;
ξ——螺旋刀片处与土壤单元点的牵连速度角;
r0——螺旋刀片半径;
f2——土壤内摩擦因数。
将挖穴机构螺旋钻头进行挖穴作业不被附近土壤卡住的临界值考虑在内,则
进一步对螺旋钻头的长度、螺旋升角、主轴及材质等进行计算和选取,以完成挖穴主要构件的设计,具体参数如表1所示。
表1 挖穴机构拟设计螺旋钻头参数项目列表
Table 1 The proposed designed spiral drill parameter items list of the holes digging mechanism
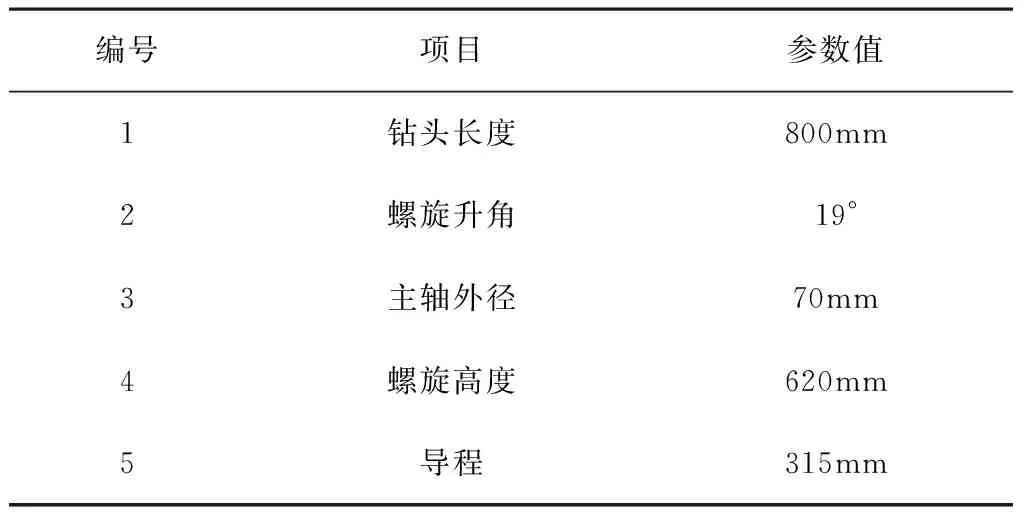
编号项目参数值1钻头长度800mm2螺旋升角19°3主轴外径70mm4螺旋高度620mm5导程315mm
利用力学扭矩关系和刀片切削土壤所需克服的总转矩(公式2),还可得出挖穴机构工作过程中所设计钻头承受的转矩和相对应的消耗功率。通过以上数据得出挖穴机构钻头的外型尺寸及参数,即
T总=T切+T定+T运动
T切=0.5[iqcosψ+k1ssin(δ+φ1)](r02-r12)
T定=10%T总
T运动=T切(1.3~1.8)
(2)
果园挖穴施肥机的升降装置与施肥部件的设计优化:针对升降构件部分的绕线轴,通过利用材料应力分析,获取其主要应力分布及集中区域并进行改进,同时做好连接传动的四杆机构参数尺寸协调跟进,使升降装置工作稳定快速。施肥部件主要控制均匀定量施肥,排肥作业环节的步进电机最佳转速及控制程序的设定为关键,可通过选取不同肥料进行多次试验确定。根据所需求的果园实地土壤条件等设定排肥量,施肥装置采用星型排肥轮,利用如下公式计算,即
(3)
式中d——排肥轮直径(mm);
L——排肥轮有效工作长度(mm);
γ——排肥箱总肥料(g/cm);
n——排肥装置转速(r/min);
α(n)——肥料充满系数;
cn(n)——特性系数;
f——凹槽端面积(cm2);
t——槽节距(cm)。
关键排肥控制装置计算完成后,绘制各关键构件三维图为后续试验提供基础。图2所示为排肥装置核心部件的三维机构建模。
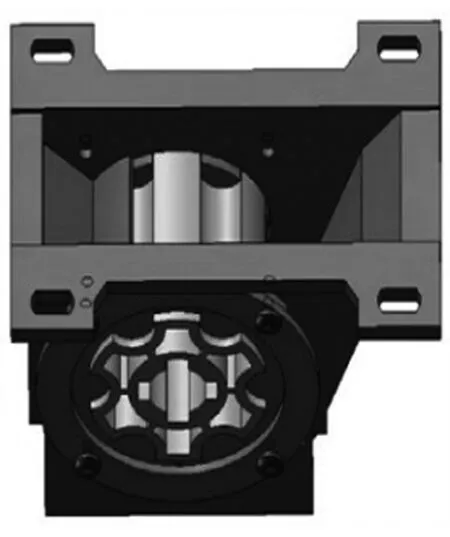
图2 果园挖穴施肥机排肥器三维结构建模
2.2 电控驱动优化
果园挖穴施肥机电控驱动部分通过驱动的各机械组件所承受的负载转矩、惯量及加减速时间进行步进电机型号选取,设计合理的接近开关、键盘电路、液晶显示电路和相关接口电路,从而构成控制有序的驱动装置。图3为果园挖穴施肥机在进行排肥过程中需要根据实时调整的行进机构变速控制简图。
图4为挖穴施肥机电控系统流程简图。由图4可知:通过选取性能优良的单片机AT89S52作为控制中心,通过输入预设排肥量并显示,在步进电机驱动系统控制之下实现定量排肥作业,相对于传动排肥不均匀而言,有较好改进效果。图5表示所需电源的控制电路设计简图,在此电源控制下实现挖穴施肥机稳定连续作业。
3 试验
3.1 前置要求
果园挖穴施肥机整机关键部件设计完成之后进行试验分析,其前置要求为:
1)选取合适的果园作业场地,包括土壤及果树植株密度等;
2)充分考虑土壤坚实度、土壤含水率与挖穴装置钻头工作转速的因素水平关系;
3)表2所列的挖穴是样机进行试验,后续进行不同肥料施肥试验。

图3 果园挖穴施肥机变速系统简图
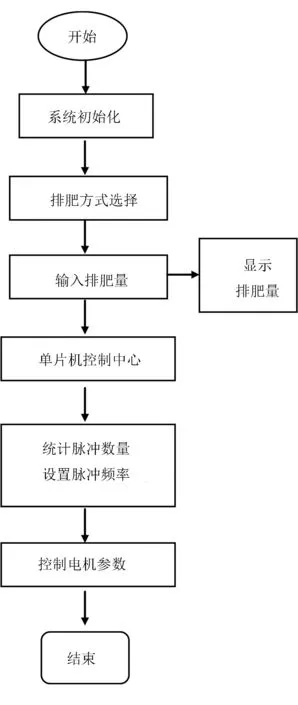
图4 挖穴施肥机电控系统流程简图
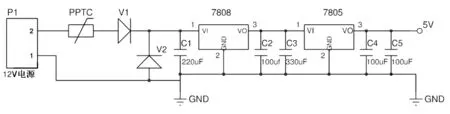
图5 直流电源控制电路设计图

编号参数单位数值1整机尺寸mm2080×850×18002挖穴电机DC60V 1200W3提升动力DC50V 550W4行进电源DC60V 850W5挖穴深度mm300~500

续表2
3.2 试验分析
通过对试验样机进行性能测试,了解挖穴施肥机整机的关键设计指标情况,验证设计样机构件组成选型合理及可行程度。在挖穴方面,改善的螺旋钻头技术参数能够实现高效快速挖穴,达到设计要求参数;传动装置可在控制驱动下实现自由升降,电源配置施肥持续时间有效延长,电控驱动优化在软件程控下运行稳定。
为进一步验证挖穴施肥机在定量施肥的效果,选取多次试验进行施肥量的大小统计。挖穴深度等其他参数控制在同一条件,每次施肥定量为400g(见图6),波动范围不大,误差控制在8%之内,说明了定量排肥机构设计的合理性。
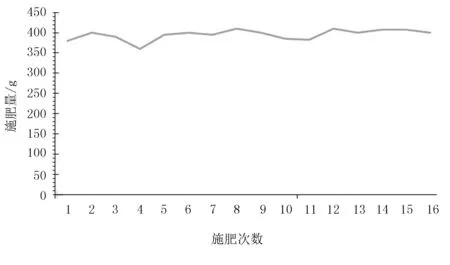
图6 挖穴施肥机定量施肥试验统计曲线
通过改变肥料的物理特性,对比不同肥料试验条件下挖穴施肥机的作业效果进行试验,如图7所示。由图7可知:施肥量与转速之间存在内在联系,该机转速稳定,施肥量在排肥装置的控制下逐渐平衡。此曲线经拟合能为改善精密排肥提供支撑,试验具有可参考性。
4 结论
对新型果园挖穴施肥机的关键部件进行机械结构设计,加入了电控驱动控制与执行装置。挖穴施肥机工作时,驱动挖穴构件进行刚度挖穴,在排肥与覆
土等装置整体配合下,通过模拟试验及统计数据分析,进行定量均匀施肥,达到优化果园高效施肥的目标,为实现果园产品质量与产量提供足够的肥料保证,具有一定的推广意义和价值。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
中国典型病例大全(2022年9期)2022-04-19
农业工程学报(2022年1期)2022-03-25
石油勘探与开发(2021年2期)2021-06-07
装备维修技术(2021年42期)2021-03-15
农业开发与装备(2021年1期)2021-02-08
海洋石油(2020年4期)2021-01-13
中华养生保健(2020年5期)2020-11-16
中国煤层气(2019年4期)2019-11-23
安徽农业科学(2015年34期)2015-10-21