
基于ADAMS的双半转腿式机器人虚拟仿真
2018-08-09 07:39徐学坦汪永明
安徽工业大学学报(自然科学版) 2018年1期
徐学坦,汪永明,韦 强,叶 俊
(安徽工业大学机械工程学院,安徽马鞍山243032)
步行机器人在各种复杂路况下的通过性能对于顺利完成目标任务非常关键。合理的腿结构是步行机器人设计的基础,现有步行机器人的腿结构大多采用多自由度的连杆机构[1-2]或模仿人或动物腿部外观的仿生多关节结构[3-6]。这些结构比较复杂,杆件和自由度数多、机构可变性大,由此造成步行机器人在复杂地形下的步态规划和运动控制变得非常困难,严重制约了步行机器人机动性能的发挥,也是其难以在复杂地形环境中得到推广应用的瓶颈。
虚拟样机技术[7]以计算机技术为依托,综合多学科技术为产品全生命周期的设计和评估提供技术支持,可提高产品质量、缩短开发周期、降低开发成本,具有广阔的应用前景。黄晋英等[8]基于ADAMS虚拟样机技术,对机器人的爬杆过程进行仿真,并分析影响机械手夹持力的主要因素,从而为这类机器人的设计提供参考。宋明辉[9]搭建ADAMS与MATLAB的联合仿真系统,对四足机器人的步态方法进行仿真分析,验证了其规划的步态方法能够有效提升四足机器人的运动稳定性。史耀强等[10],叶仁平等[11]建立ADAMS与MATLAB联合仿真平台,基于虚拟样机仿真分析得出产品或系统的关键参数,为物理样机的制作提供了理论依据。基于二级半转机构[12-13]运动原理,文中提出一种新型的双半转腿式机器人,该机器人通过跨步腿杆的交替着地实现步行运动,且基于ADAMS软件建立机器人的虚拟样机模型,对其平地行走过程进行仿真分析,为进一步的样机设计和优化提供参考。
1 双半转腿式机器人机构原理
双半转腿式机器人主要由车体支架、两条轮腿、轮腿支架、辅助支撑杆和滚动轮等组成,其机构原理如图1。其中,轮腿的设计基于二级半转机构运动原理,其由一级转臂杆、二级转臂杆和前后两个跨步腿杆组成,各腿杆之间通过转动副连接,并由舵机直接驱动。一级转臂杆、二级转臂杆和跨步腿杆以4∶-2∶-1的转速比旋转(负号表示方向相反),两个跨步腿杆交替与地面接触实现步行运动。双半转腿式机器人各跨步腿杆的转速相同,且同侧两跨步腿杆之间的角度始终为90°。轮腿支架上端与车体支架通过转动副连接,通过转向舵机驱动轮腿转动,进而实现机器人的转向控制。辅助支撑杆通过带扭簧的铰链固连于车体支架上,其下端装有滚动轮,可随着机器人的行走而滚动。辅助支撑杆为两段套筒结构,内设减震弹簧,用于缓解机器人行走中的振动。
2 双半转腿式机器人虚拟样机模型
双半转腿式机器人基本设计参数如表1。首先在Solidworks三维软件中完成机器人的三维建模,并对螺钉、舵机等细节进行必要的简化处理,将建好的三维模型保存为x_t格式并导入ADAMS软件中,虚拟样机模型如图2。
图2中,设定车体坐标系O′x′y′z′固连于车体支架中心,其x′轴沿车体支架向右,y′轴指向机器人前进方向,z′轴垂直于x′y′平面向上。初始时刻,车体坐标系x′轴与全局坐标系x轴方向相同,车体坐标系y′轴与全局坐标系z轴方向相反,车体坐标系z′轴与全局坐标系y轴方向相同。在ADAMS中定义各腿杆的运动耦合关系,即一级转臂杆、二级转臂杆和跨步腿杆三者之间的转速比为4∶-2∶ -1,以满足二级半转机构的转动特性;设置减震弹簧、运动驱动等,并合理设置跨步腿杆端部与地面之间的三维碰撞属性。
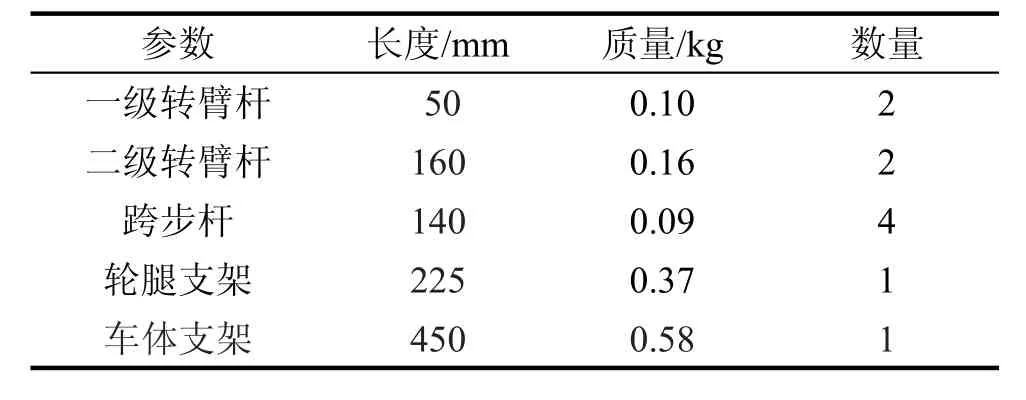
表1 双半转腿式机器人参数_Tab.1_ Parameters of double-half-rotation legged robot
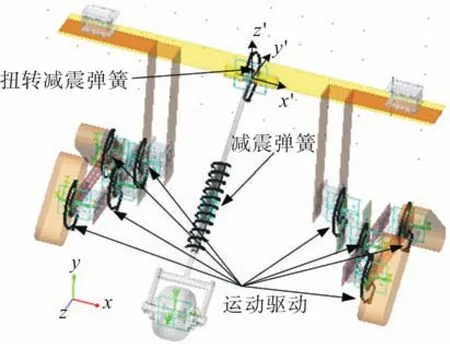
图2 双半转腿式机器人虚拟样机模型Fig.2 Virtual prototype model of double-halfrotation legged-robot
3 平地行走虚拟样机仿真
以双半转腿式机器人在平地直线行走为例,进行动力学仿真分析。设一级转臂杆的驱动舵机转速60°/s,仿真时间为12 s。根据二级半转机构的转动特性,仿真为2个跨步周期。
3.1 车体支架质心位移、速度和加速度仿真分析
通过ADAMS仿真,获得双半转腿式机器人车体支架质心在垂直和水平方向的位移、速度和加速度曲线,如图3。图中dy,dz分别为垂直和水平方向的位移;vy,vz分别表示垂直和水平方向的速度;ay,az分别表示垂直和水平方向的加速度;t表示时间。
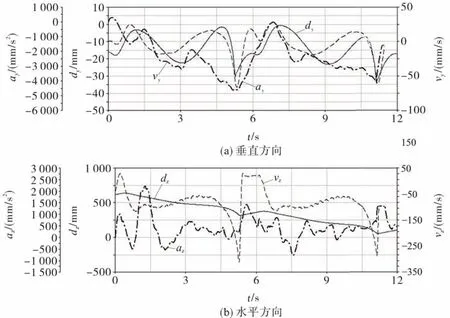
图3 车体支架质心位移、速度和加速度曲线Fig.3 Curves of displacement,velocity and acceleration of the body bracket centroid
该机器人的前进运动通过轮腿的跨步腿杆交替着地实现。由于二级半转机构本身的运动特性,在前进过程中该机器人的车体支架有一定的上下起伏度。根据图3可知:该机器人的车体支架起伏度(垂直方向位移)dy较小,约为33 mm;垂直方向的平均速度vy和平均加速度ay分别为-1.7 mm/s和2.0 m/s2,均较小,有利于搭载仪器;水平方向的平均速度vz为-42.1 mm/s。当跨步腿杆接触地面的瞬间,由于跨步腿杆与地面的冲击作用,y向和z向的加速度均发生突变,但其他时段的加速度均较小。
3.2 跨步腿杆与地面接触力分析
跨步腿杆与地面之间的接触力是腿式机器人受力分析和设计的关键依据。由于该双半转腿式机器人的两条腿相对于车体支架对称分布,其在平地行走两侧的跨步腿杆均交替与地面接触,则其受力相似,接触力的大小也相似。文中以右侧跨步腿杆为研究对象,进行跨步腿杆与地面接触力的分析。设定各跨步腿杆与地面接触碰撞参数,通过动力学仿真分析,得到跨步腿杆与地面接触力曲线,结果如图4。该双半转腿式机器人平地行走时,2条跨步腿杆交替与地面接触,其与地面的接触力(F1,F1)曲线也呈周期性变化。在右1跨步腿杆和右2跨步腿杆交替着地时,由于车体支架和辅助支撑杆的阻尼作用,其与地面的接触力曲线存在部分重叠。
由图4可知:随着跨步腿杆运动,右1跨步腿杆开始受路面的支撑力较大,随着机器人向前运动,右1跨步腿杆受到路面的支撑力逐渐减小,其与地面接触过程中垂直方向接触力F1y的平均值为3.27 N,水平方向接触力F1z平均值为-0.06 N;右2跨步腿杆刚开始被抬起与地面不接触,其所受路面的支撑力为0,随着机器人向前行走,右2跨步腿杆开始与地面接触,所受地面支撑力逐渐增大,其与地面接触过程中垂直方向接触力F2y的平均值为3.10 N,水平方向与地面接触力F2z平均值为-0.03 N。
3.3 辅助支撑杆的减震效果分析
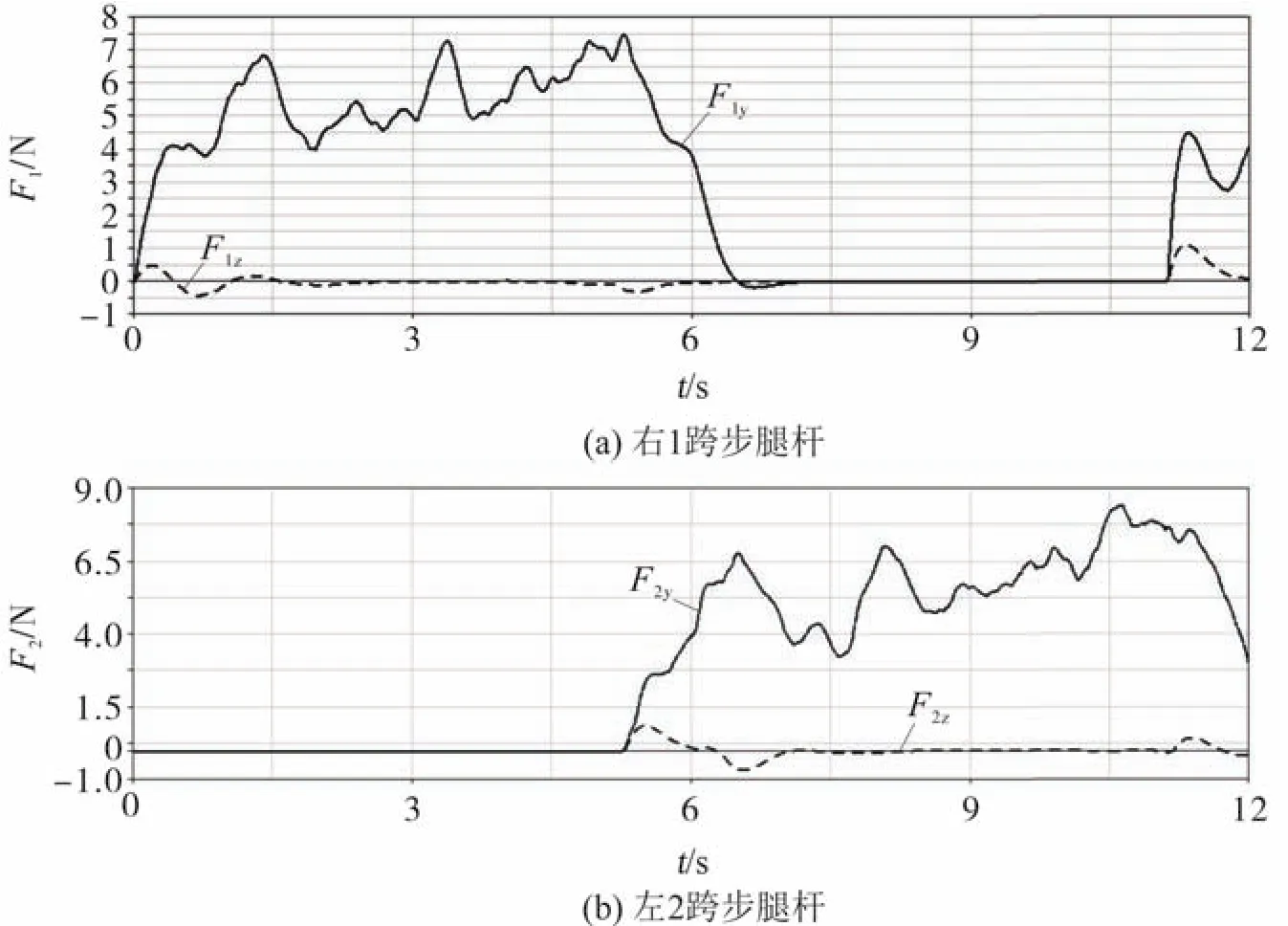
图4 右侧跨步腿杆与地面接触力曲线Fig.4 Curves of contact force between the right side wheel-legs and the ground
该机器人的辅助支撑杆通过带扭簧的铰链固连于车体支架上,其下端装有滚动轮,可随着机器人的行走而滚动。辅助支撑杆为两段套筒结构,内设减震弹簧,用于缓解机器人行走中的振动。辅助支撑杆滚动轮在双半转腿式机器人行走过程中始终与地面接触,其与地面之间的接触力F3始终处在一定范围内波动,如 图5。滚动轮与地面接触过程中y向接触力F3y的平均值为8.30 N,z向与地面接触力F3z的平均值接近于0。在该双半转腿式机器人行走过程中,辅助支撑杆内的减震弹簧受力Fs曲线如图6。该机器人的辅助支撑杆内减震弹簧主要用于缓冲两跨步腿杆交替触地产生的振动。由图6可知,减震弹簧受力Fs平均约为-0.64 N,可以看出该减震弹簧具有一定的减震效果。
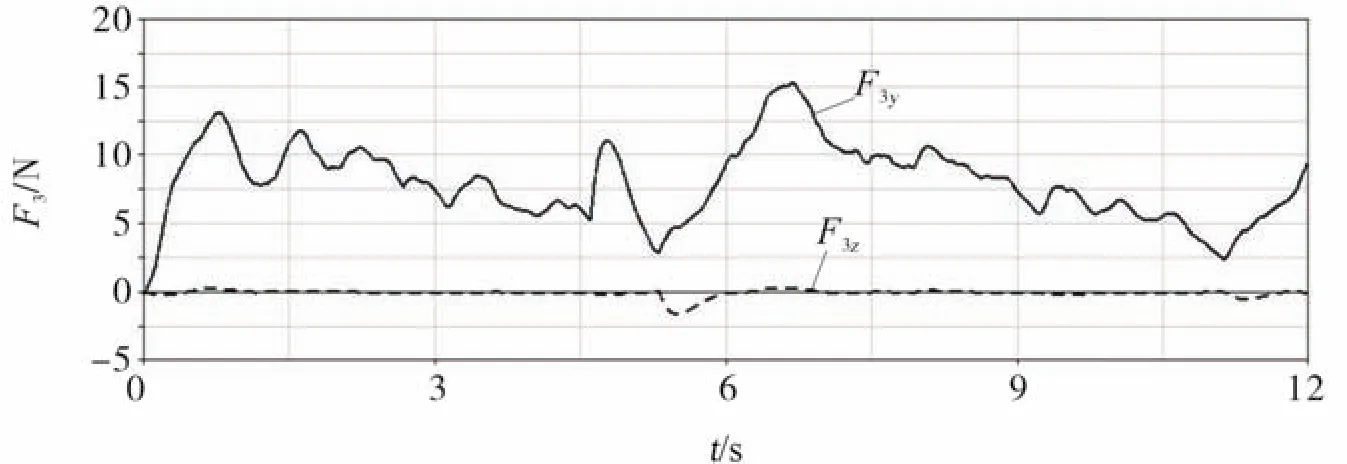
图5 辅助滚动轮与地面接触力曲线Fig.5 Curves of contact force between the auxiliary wheel and the ground
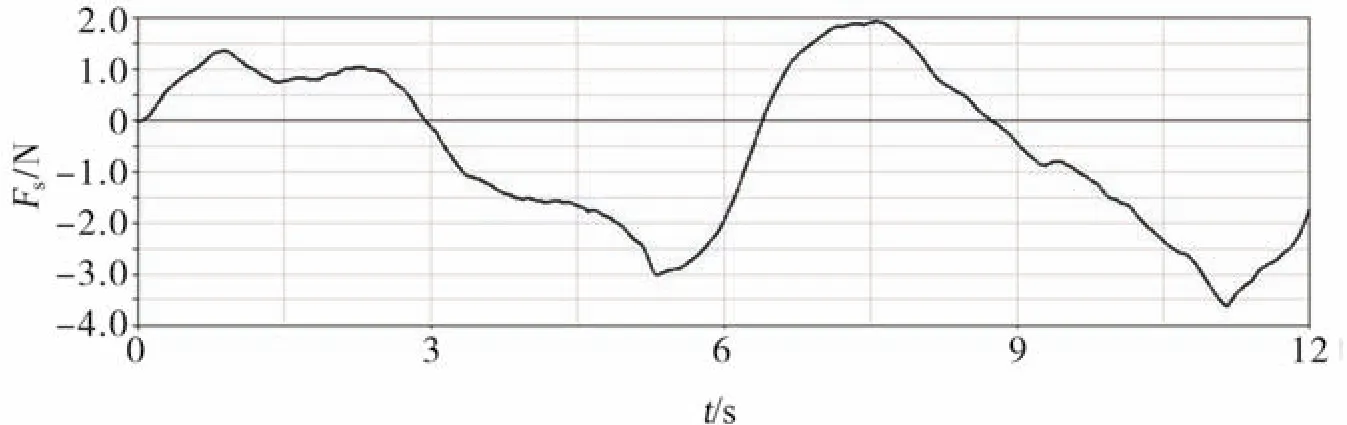
图6 辅助支撑杆内减震弹簧受力曲线Fig.6 Force curve of the damping spring in the auxiliary supporting rod
由于辅助支撑杆通过带扭簧的铰链固连于车体支架上,在机器人行走过程中,辅助支撑杆通过带扭簧的铰链绕车体坐标系x′轴呈规律地转动,图7为转动铰链处扭簧在机器人运动过程中所受的力矩曲线。由图7可知,扭簧所受的力矩随机器人的运动呈周期性变化,一个周期的平均力矩T为-77.72 N·mm。故在辅助支撑杆与车体连接的铰链处设置扭簧可起到一定的减震作用。
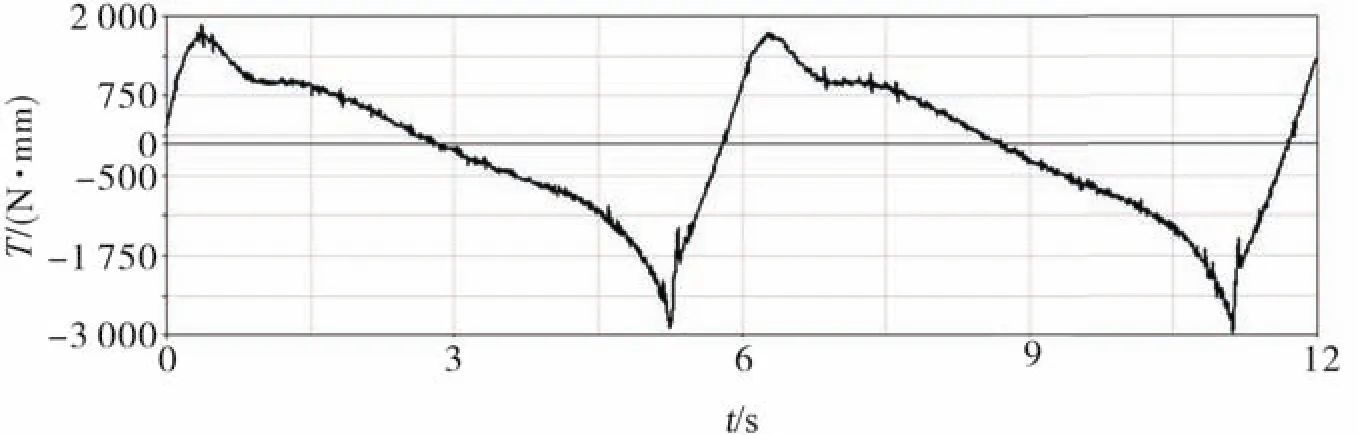
图7 铰链处扭簧受力矩曲线Fig.7 Torque curve of torsional spring at the hinge
4 结 论
1)该双半转腿式机器人在平地行走过程中其车体支架上下起伏度较小,约为33 mm,且在垂直方向车体支架的速度和加速度曲线波动不大,有利于平稳搭载各种科学仪器。
2)该双半转腿式机器人通过两侧的跨步腿杆交替着地实现行走功能,平地行走过程中跨步腿杆与路面接触力基本呈周期性变化。
3)该双半转腿式机器人辅助支撑杆的减震弹簧、扭簧具有一定的减震效果。
猜你喜欢
航空学报(2020年9期)2020-12-02
房地产导刊(2020年6期)2020-07-25
人民调解(2019年1期)2019-03-15
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
发明与创新·中学生(2018年1期)2018-02-02
中国新闻周刊(2017年23期)2017-07-12
青年时代(2016年32期)2017-01-20
科技创新导报(2016年8期)2016-10-21
科技传播(2015年16期)2015-12-28
