
基于S7-200 PLC 对一款鞋子自动刷胶机控制系统的改进
2018-08-06 01:19曾喜娟吴志华
太原师范学院学报(自然科学版) 2018年1期
曾喜娟,吴志华
(1.黎明职业大学 机电工程与自动化学院,福建 泉州 362000;2.黎明职业大学 信息与电子工程学院,福建 泉州 362000)
鞋子自动刷胶机可以给鞋子自动上胶,还可以用在皮革、纸盒、饰品、建材、运动器材等行业中,具有安全设计、防止手被卷入滚轮内,防止工作物被卷入蓄胶糟内.采用步进电机拖动滚轮刷胶,滚轮半径为30 mm,速度可以调节,以达到刷胶需要的工艺,同时胶槽及滚轮均可独立控制温度,使用方便,为制鞋提高了生产效率.因此控制系统的稳定性及准确性对鞋子的生产起到了决定性的作用.
1 鞋子自动刷胶机原有的控制系统

图1 单片机控制的鞋子自动刷胶机控制系统的原理图
原有的鞋子自动刷胶系统是采用单片机控制的,其控制系统如图1所示.
控制系统以单片机为核心,单片机接受现场控制信号,经过处理,控制步进电机的驱动器去驱动步进电机工作,同时向显示模块发出触发信号,显示模块显示当前步进电机的转速.电源模块为各个模块提供电能,通信模块用于与PC机通信.本系统设计简单,价格便宜.但是在使用中由于制鞋环境粉尘多、潮湿以及强电干扰,常常导致控制系统不稳定,刷胶工艺满足不了需求,因此提出一种基于S7-200 PLC对鞋子自动刷胶系统的控制方案.
2 基于S7-200 PLC的鞋子自动刷胶系统的设计
2.1 CPU224XP PLC DC/DC/DC的特点
CPU224XP PLC( DC/DC/DC)是S7-200家族的一员,它需要直流24 V电源供电;直流输入、直流输出;共有14点输入,10点输出;且有两点高速脉冲输出端口分别为Q0.0和Q0.1.这款PLC身形小巧,功能齐全,输入接口电路采用光隔,因此抗干扰能力强,性能稳定,方便安装与使用,而且PLC的脉冲输出编程方便,控制稳定,故选用这款PLC作为本控制系统的核心单元.
2.2 鞋子自动刷胶机控制系统的组成
基于S7-200PLC的鞋子自动刷胶机控制系统的组成如图2所示.
本系统显示模块采用触摸屏显示[1],步进电机采用Microtep 17 HS101两相混合式步进电机进行驱动.步距角为1.8°,输出相电流为1.7 A驱动电压为直流24 V.步进电机驱动器采用SH-2H042Ma型驱动,SH-2H042Ma外形图如图3所示.
该步进电动机驱动器的工作电流输出为1.7 A,工作电压为DC 24 V.驱动器为2/4相混合型步进电机驱动器,集硬件环形脉冲分配器与功率放大器与一体,在驱动器上有一个4位的拨位开关(位于图3中右上角的小窗口中)SW1,SW2,SW3,SW4,通过设置SW1-4的位置(00,01,10)可以得到不同的步距角,分别对应:0.9°,0.45°,0.225°.另外在驱动器上还有1个10位接口的接线端口排(位于图3中左上角的端子排),分别用于与可编程控制器和步进电动机连接[2].

图2 S7⁃200PLC控制的鞋子自动刷胶机控制系统的结构图图3 SH⁃2H042Ma步进电机驱动器外形图
2.3 鞋子自动刷胶机控制系统的原理图
基于S7-200PLC改进后的鞋子自动刷胶机控制系统的电气原理图如图4所示.
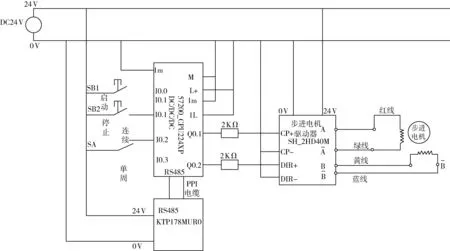
图3 基于S7-200PLC改进后的鞋子自动刷胶机控制系统的电气原理图

这里Q0.0作为脉冲输出端,控制步进电机的运行,Q0.2端口控制步进电机的运行方向.本系统根据刷胶需要设置步进电机驱动器上的拨位开关:SW1为0,SW2为1,SW3和SW4都为1的状态,即每转的细分步数为800步/转.在本系统装置中,步进电机转一圈带滚轮转动一圈,由于滚轮周长是188.4 mm,所以每步滚轮移动的距离为0 mm,假设鞋子底边长度为25 cm,则要设移动250 mm的距离,需要的脉冲数为250/0.24≈1 042个脉冲.

图5 改进后的鞋子自动刷胶机控制系统程序流程图
S7-200PLC内置两个PTO/PWM发生器,它们的输出点分别为Q0.0和Q0.1,平时Q0.0和Q0.1可以作为普通输出使用,但作为PTO/PWM使用时,其他操作均失效.通常在启动PTO或PWM操作之前,用复位指令R将Q0.0或Q0.1清零[5].
2.4 改进后的鞋子自动刷胶机控制系统程序设计[3]
改进后的鞋子自动刷胶机控制系统程序流程图如图5所示.
程序设计时考虑到刷胶不均匀时,可以补胶,因此设置单周期的工作方式,另外步进电机脉冲输出这里选择PTO脉冲输出,所以设置脉冲输出发生器的控制字字节必须设置正确,否则步进电机无法运行[4].
依此流程图编写程序并下载到PLC了,联机调试,系统运行稳定,抗干扰能力得到了提高.
3 结论
本文主要介绍了基于S7-200 PLC 对一款鞋子自动刷胶机控制系统的改进设计方法,同时介绍SH-2H040Ma型步进电机驱动器与S7-200CPU224XP可编程的连接方式,为工程实践提供借鉴.改造后的系统用于环境较差的制鞋场地,系统的稳定性及抗干扰能力得到了大大的提高,刷胶工艺也进一步满足生产的需求.
猜你喜欢
港口装卸(2022年3期)2022-07-06
北华大学学报(自然科学版)(2021年3期)2021-07-13
设备管理与维修(2021年23期)2021-02-10
电脑爱好者(2020年6期)2020-05-26
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
冰雪运动(2019年2期)2019-09-02
北京航空航天大学学报(2017年5期)2017-11-23
阅读(中年级)(2016年11期)2017-01-23
