
改进雷达图法在舰船动力系统综合评价中的应用
2018-08-04 07:19安士杰汪宏伟
装备制造技术 2018年6期
曹 蒙,安士杰,汪宏伟
(1.海军工程大学 动力工程学院,湖北 武汉430033;2.武汉船舶职业技术学院 动力工程学院,湖北 武汉430050)
0 引言
舰船动力系统的综合评价,作为舰船试验和验收的内容之一,其评价方法的优劣,对全面系统地掌握其功能、性能起着重要作用[1]。目前,对于这类多属性决策问题,有了一定的研究,文献[2]采用了层次分析法,并进行了优化设计,文献[3]利用模糊数中心决策原理展开了分析。在实际运用中,可以发现,层次分析法需要大量数据支持,且计算复杂;模糊分析法中,评价结果受主观因素影响较大。
针对上述问题,本文采用雷达图法进行分析,结合舰船使命任务需求,提出关键评价指标,并在传统雷达图分析的基础上,引入权重思想,形成改进型的雷达图。通过对改进雷达图的特征提取,构建评价函数,实现对评价对象的综合分析。
1 雷达图法
雷达图法是典型的图形评价法,最大的特点是形象直观,既可以通过观察图形进行定性分析,又可以通过对图形的特征提取进行定量分析[4]。
1.1 基本原理
首先,根据评价指标的数量、数值和权重,绘制评价对象的雷达图。此时,可通过雷达图之间的对照比较,进行定性分析。然后,对雷达图进行特征(面积、周长)提取,生成特征向量。其中,面积反映了评价对象的整体优势,周长表征了各指标发展的均衡性,即当面积一定时,周长越小,则雷达图形越近似于圆,各指标的值越趋于相等、平衡。最后,通过构造评价函数,并依据其值的大小进行定量分析,实现对各评价对象优劣的排序。
传统雷达图以数轴长度代表指标值,数轴均匀分布,没有指标权重的考量。在此基础上,改进型雷达图用指标线所在扇形区域的圆周角代表指标权重,突出了指标权重在综合评价中的影响,使得分析更加科学有效。
1.2 雷达图法的分析步骤
1.2.1 数据标准化
通过试验、理论评估、系统仿真等方法获取评价指标值,形成初始评价矩阵X=(xi)jm×n.其中,xij为第i评价对象的第j个指标值,m为评价对象的个数,n为指标数。为消除量纲的影响,需对初始评价矩阵X=(xi)jm×n进行标准化处理,继而得到标准化评价矩阵Z=(zi)jm×n.记初始评价矩阵X中每列的最优值为,采用线性尺度变化法[5]对指标值进行标准化:

1.2.2 绘制改进型雷达图
基本步骤:①以点O为中心,根据评价指标数,画出n条指标线;②根据指标权重,确定指标线所在扇形区域的圆周角 θij.其中,θij= 2πωij,ωij为指标的权重。各指标的权重可通过专家打分法、熵权法、变异系数法等方法获得;指标线与圆周角的角平分线重合;③将指标值标记在对应指标线上,再用线段连接相邻指标线上的标记点,所形成的不规则多边形就是考虑指标权重后的改进型雷达图。
1.2.3 提取特征向量并计算结果
(1)特征提取
取第i个评价对象的雷达图面积为Si,周长为Li,指标数为n,第j项指标的标准值为zij.根据三角函数的正、余弦定理,可得雷达图的面积与周长,即
(2)构造评价向量
评价向量 Vi=[vi1,vi2]定义为:
其中,Sm=max{Si}.向量分量vi1是面积评价值,其大小反映了评价对象的整体水平;vi2是周长评价值,其值为相同周长下的面积比,反映了评价指标的均衡程度。可以发现,评价向量从指标的整体水平和均衡程度两个方面进行了综合考虑。
(3)构造评价函数
考虑到评价向量为二维向量,可采用几何平均数为其评价函数,即

(4)计算评价值,根据其大小对各评价对象进行排序。
2 舰船动力系统的评价指标
舰船动力系统一般由推进系统、功率传递系统和推进器、辅助管路系统和控制和监测系统组成,根据其结构组成及作战使用需求,可将航速适应性、机动性、生命力、隐身性和可靠性作为评价指标。
(1)航速适应性,是指舰船在执行不同任务时,实现与任务需求相适应的航速的能力。可分解为最高航速、全速、巡航航速、低速和倒车航速。其中,最高航速是指主动力装置以最大功率运转时达到的速度;全速是指主动力装置以额定总功率运转时达到的速度;巡航航速是舰船执行日常巡航时的速度,也是续航力实现的特定航速,体现了舰艇的作战半径;低速是指船舵能发挥操纵作用的最低速度。
(2)机动性,对动力系统而言,是指其功率及工况在时间上改变的特性。一般包括:备战备航所需时间,即由静止状态到可航行状态的最短时间;变工况性能,即动力系统从最低工况到最高工况的加速时间;制航性能,代表了舰船由全速航行到停止的时间。
(3)生命力,是指动力系统在战斗破损的情况下,仍能保证舰船航行的能力。根据影响动力系统生命力的主要因素,将动力系统生命力分解为以下几个指标:①独立组的划分和布置,主要体现在主机及控制部位(机旁、集控室、驾驶室)的独立布置及其功能的实现;②机械设备的抗暴性和减震措施,主要反映了动力系统所属设备的防爆抗冲击能力;③机械设备的备用、转换能力,主要体现在推进装置工作的独立性、单轴运行能力等方面。
(4)隐身性,是指动力系统的物理场不被敌方过早发现、跟踪和识别的能力,包括声隐身和红外隐身。声隐身主要通过采用减震措施、噪声小的机械以及优化的降噪设计来实现。红外隐身一般采用红外抑制设计、烟囱和排烟冷却等措施,降低舰船不同区域的温度差,从而降低来袭兵器的识别能力,实现红外隐身效果。
(5)可靠性,是指动力系统在规定是寿命期限内,无故障的持续时间。根据GJB1909.6-94,动力系统的可靠性主要通过任务可靠度、致命性故障间隔任务时间、平均故障间隔时间、使用寿命来表征[6]。
3 仿真示例及分析
3.1 仿真态势设定
下面,以考查三型船舶动力装置的优劣为例,具体性能参数见表1.
表1 动力系统基本性能参数
根据文献[7]上述指标的权重向量为:

则由θij=2πωij可得指标的圆周角向量为:

3.2 仿真示例
(1)获取评价矩阵
在上述指标中,最高航速、生命力、平均故障时间间隔属于效益型指标,变工况时间、声隐身性属于成本型指标。根据公式(1)、(2),产生评价矩阵:
(2)绘制雷达图(如图 1)
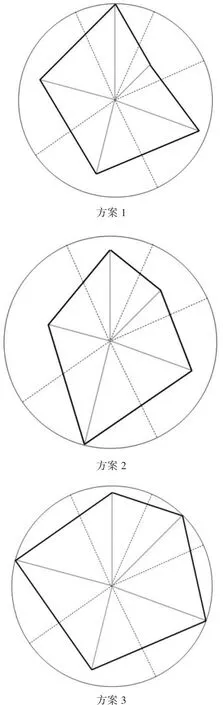
图1 各动力方案的改进型雷达图
由图1观察,可进行定性分析:
1)方案3雷达图面积最大,且各指标相对均衡,说明方案3的整体优势最大;
2)方案1最高航速指标突出,但变工况性能较弱;
3)方案2声隐身优势明显,其它指标一般。
总的来说,方案3总体优势好于方案1和方案2,但综合排序还需要进一步的定量分析。
(3)提取特征向量,计算评价函数(如表2)。
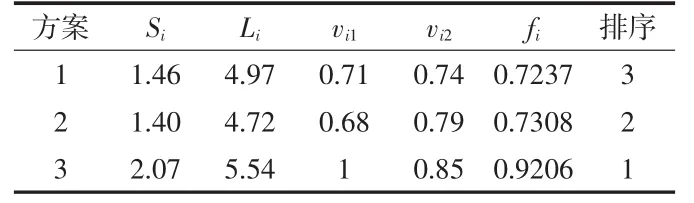
表2 3种动力系统特征值和排序
由评价计算结果可知:
1)从整体优势指标vi1来看,方案3>方案1>方案2;
2)从均衡度指标vi2来看,方案3>方案2>方案1;
3)从综合评价指标fi来看,方案3最优,方案2次之,方案1相对较弱。
4 结束语
本文将权重思想引入雷达图分析中,增强了其综合分析的科学性。结合舰船作战需求,重点关注了指标,运用改进雷达图法进行了定性定量分析,并进行了综合排序,为动力方案选型提供了参考依据。可以看到,雷达图法形象直观,操作简单,既可以对不同对象做横向比较,也可以对同一对象做不同时期的纵向比价,有很好的适用性[8]。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
水上消防(2022年1期)2022-06-16
中国现代医生(2022年6期)2022-04-23
中国药学药品知识仓库(2022年5期)2022-04-11
初中生世界·九年级(2021年11期)2021-12-28
舰船科学技术(2021年12期)2021-03-29
海洋开发与管理(2020年2期)2020-09-10
舰船科学技术(2018年7期)2018-07-25
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2016年1期)2016-02-27
