
基于光伏并网同步逆变器的控制策略研究
2018-07-31 01:34张志涛胡平袁凯
电气自动化 2018年2期
张志涛, 胡平, 袁凯
(1.长安大学 电控学院,陕西 西安 710000;2.陕西工业职业技术学院 电气学院,陕西 咸阳 712000)
0 引 言
进入21世纪,随着煤炭、石油等传统能源的日益枯竭,开发分布式可再生能源已成为全世界能源规划发展的重要方向。随着光伏发电技术的成熟,其装机的规模不断扩大, 对电网而言分布式能源的渗透率不断提高,储能技术的利用能够为整个电网系统提供有效的支撑,增强电网的调节能力[1]。针对太阳能发电的间歇性和波动性问题,可以在光伏发电系统中配置一定规模储能单元,提升电网接纳新能源所发电能的能力,有利于能源的充分利用和电网的稳定[2-3]。目前的分布式电源并网技术中有大量的电力电子器件使用,其响应速度快、几乎没有转动惯量、难以参与电网调节[4],无法为含分布式电源的输配网提供有效的电压和频率支撑,缺乏一种与电网的同步机制[5-6]。荷兰的VYSNC项目中,首先提出了虚拟同步发电机(virtual synchronous generator,VSG)概念,通过先进的控制策略让并网逆变器模拟同步发电机的外部特性[7],以提高电网电能的稳定性,基于此技术的逆变器称为同步逆变器。传统控制方法的种种缺陷已经不满足分布式电源日益增大的装机容量需求,同步发电机具有良好的调压调频特性,惯性比较大,若使并网逆变器模拟出同步发电机的外特性,对含有分布式电源的配电网来说稳定性会得到很大的提高[8]。文献[9-10]利用同步发电机的经典数学方程进行建模,针对逆变器的性能进行调整使其具有同步发电机的调频调功的性能,但模拟出的发电机未充分考虑惯性环节,输出的电能稳定性较差,同步机制受系统中元件影响较大,无法提供精确的同步并网。文献[11-13]在二阶广义积分器的基础上改进完善了PLL的模型,但在电压失衡和发生畸变时受谐波影响动态较差。因此,本文提出了一种新的控制策略,针对现有的预同步算法,在VSG控制策略中引入了积分反馈环节,消除频率静差,增大相角补偿,并进行数字仿真,验证其良好的并离网控制特性。
1 传统光伏并网构成分析
光伏并网结构如图1所示,包括由光伏电池单元、逆变器、储能单元和控制器等[14]。光伏板通过光生伏打效应将太阳能直接转化为电能,通过前级DC/DC将汇聚的电压升高,并在此环节实现最大功率点跟踪(MPPT);后级的DC/AC环节将光伏电池产生的直流电逆变成交流电经过阻抗部分由公共连接点PCC并入电网;控制器是通过采集电网侧电能信息,经过反馈比较调节逆变器的输出,使其特性能够与电网电压相符;能量管理模块维持储能出力与光伏电池出力之间的能量平衡。

图1 光伏并网结构图
光伏并网过程中需要对两个环节进行控制:一是输出波形控制,二是功率点控制。波形控制要求快速,需要在一个电力电子器件的动作周期内实现对目标电流的跟踪。光伏阵列功率会随着外部条件的变化而变化,输出极不稳定。当光照度和温度固定的情况下,光伏阵列有不同等级的输出电压,而光伏阵列的输出功率随着电压等级的变化呈抛物线形变换,在某一点处才能达到输出功率-电压曲线峰值。可根据瞬间电导变化和电导增量的变化来调节控制信号,调整光伏阵列的工作状态,使其保持在最大功率点。储能系统的存在可以使能量双向流动,保障微电网系统的安全运行。
2 同步逆变器的设计分析
虚拟同步发电机技术的本质就是借鉴同步发电机的机械特性和电气运行特性,调节并网逆变器的输出,使得并网逆变器在机理上具有同步发电机的特性[15]。
光伏并网系统的VSG结构框图如图2所示,其中储能电池和光伏出力等效为直流电压源Udc,V1~V6为全控型电力电子器件构成逆变桥,其中桥臂电压ea、eb、ec等同于同步发电机的输出电动势,电感L1的感抗等效于同步电抗,电容C的电压Uca、Ucb、Ucc等效于端电压。L2是线路中连接电感,它可以保证整个线路阻抗呈感性。则由两相静止变换实现有功无功解耦其分别为:
pe=eαiα+eβiβ
(1)
Qe=eβiα-eαiβ
(2)
式中:eα、eβ为并网交流侧桥臂中点电压的αβ分解量;iα、iβ为电感L1电流的αβ分解量。
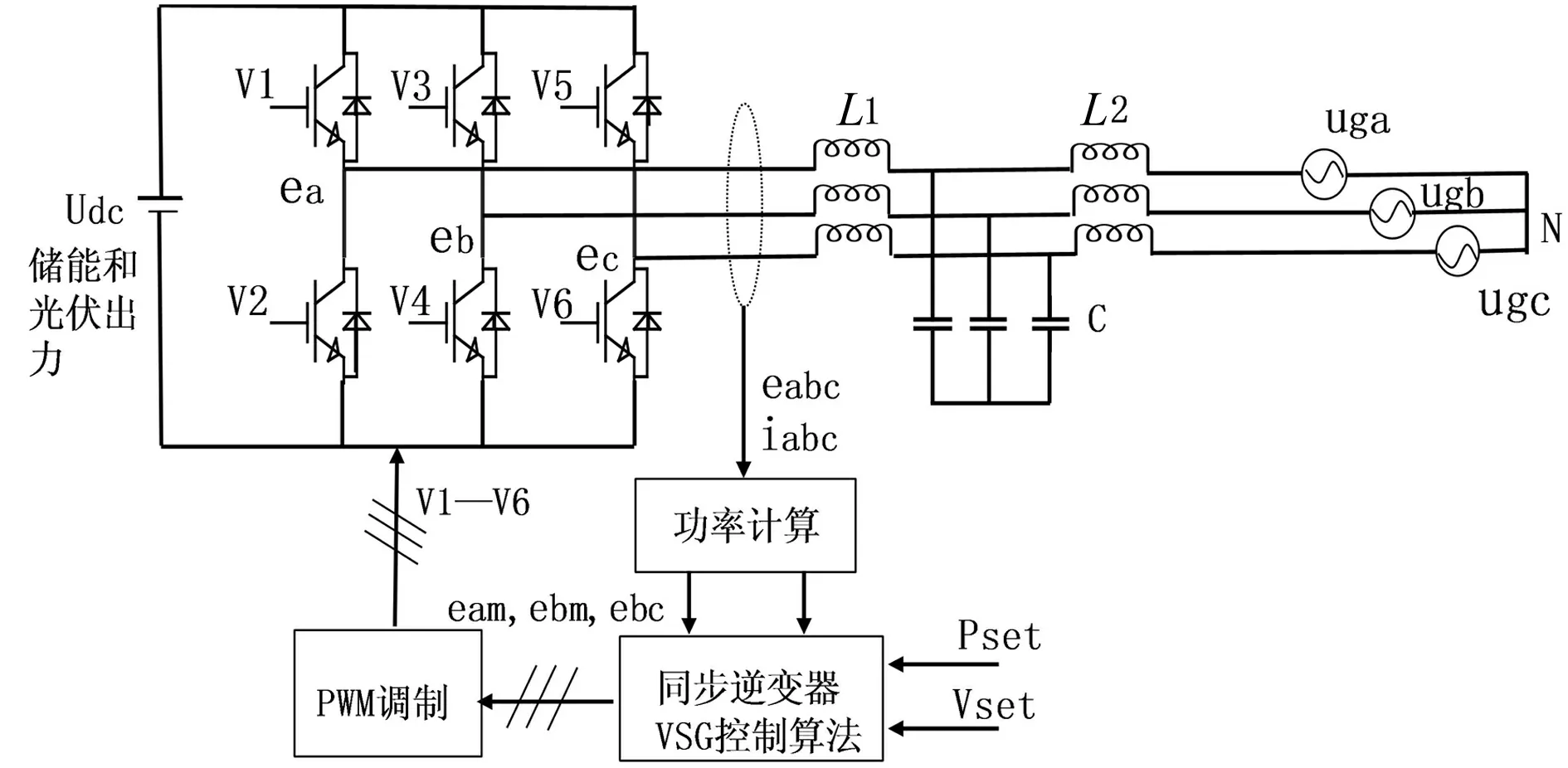
图2 VSG主电路结构图
同步发电机的转子运动方程如下:
(3)
Pset=Tsetω≈TsetωN
(4)
Pe=Teω≈TeωN
(5)
(6)
式中:Tset为转矩给定值;Te为电磁转矩;Pset为功率给定值;Pe为电磁功率;J为转动惯量;Dp为有功阻尼系数;ωN为额定角频率;ω为同步发电机转子角频率,可由转矩公式计算得出;θ为机械角速度,由θ=pθe(p=1时)可得其在数值上等于电动势角度。
同步发电机的定子电气方程如下:
E0=U+IRa+jIXS
(7)
式中:E0为励磁电动势;U为电枢端电压;Ra为电枢电阻;XS为同步电抗;I为电枢电流。
同步发电机中无功功率的变化与端电压密切相关,电压的励磁回路通过改变励磁电流的大小来改变其输出电势,其励磁调节的计算方程为:
(8)
(9)
式中:Em为机端电势有效值;Uref为参考电压有效值;U0为输出电压有效值;UN为额定电压有效值;Qset为无功功率给定值;Qe为同步发电机实际无功功率;Dq为无功阻尼系数;G(s)为励磁控制器的调节器。
为了保证输出电压能够无静差地跟踪参考电压,G(s)中必须含有积分环节,在此选择积分调节器进行分析,那么有G(s)=M/s,其中M为积分系数,励磁回路惯性系数K=Dq/M,将其代入式(7)和式(8)中可得其时域表达式,
(10)
同步发电机的端电压变化引起励磁环节输入参数的改变。综上所述,同步逆变器的有功环和无功环输出在外特性上拥有了和同步发电机接近的性能。根据式(1)~式(9)可以设计出同步逆变器的有功环和无功环调节框图,如图3所示。

图3 预同步控制器框图
在电压幅值的调节环节中,同步逆变器无功环采取的传统控制策略中只有比例调节器Dq,无法实现及时反馈电网电压状况。可在电压调节器中加入积分环节来反馈电压状态,实现逆变器的输出电压幅值追踪电网电压幅值,在一定的条件范围内满足并网要求。
在电压的相位调节环节中,可根据采集的大电网电压的情况,与逆变器交流侧的输出相比较,根据其矢量图模型,及时调节频率调节器的中电压的旋转速度,使两者的电压重合。将公共连接点两侧的电压相角差送入PI调节器中经运算后得到的结果加上频率调节器的实际输出频率,经积分运算求得同步逆变器输出电压相位。若电网电压相位超前,则在PI调节环节使得逆变器的输出电压矢量旋转速度增加,从而可以跟踪上电网电压,若电网电压相位滞后于同步逆变器输出侧的,则反之调节,使两者相位之差为接近零的某一值,则满足并网条件。
由式(7)进行运算可得机端电压,再将其作为参考值进行三相到两相旋转坐标变换,与实际的端电压进行比较后,经过PI调节器的作用输出到脉冲宽度调制器进行输出作为逆变器的调制波。以上可知,基于虚拟同步发电机的预同步调节技术将同步发电的优越性能应用于并网逆变器的调节,将采集的实时电网电压信息传送至控制器,和实际的电压特性经运算后送入PI调节器,将其输出作为控制信号反馈至并网逆变器,实现了并网前同步逆变器的输出特性与电网电压特性的同步,达到了并网的基本条件。
3 仿真与结果分析
利用MATLAB/Simulink仿真平台搭建了基于光伏并网的同步逆变器控制模型来验证该策略的可靠性。仿真系统相关参数如下:光伏电池在光照强度S为1 000 W/m2,温度T为25 ℃的环境下,输出的最大有功功率P=10 kW,无功功率Q=0 var;蓄电池容量为12 kW·h,额定电压为700 V;系统中负荷P=2 kW,Q=0 var;微电网额定频率为50 Hz,额定电压为380 V。滤波电感L1为1.65 mH,滤波电容C1为12 μF,工频fN为50 Hz,额定有功功率PN为10 kW,额定无功功率QN为0 var,定子电枢电阻Ra为1 Ω,电枢电感L2为0.5 mH,运用本文的并网控制方法,在离网到并网过程中仿真结果如下。微电网系统在孤网状态下稳定运行,在2 s时启动并网进程,预同步并网控制环节开始工作,整个并网过程中同步逆变器输出侧的电动势、频率、角频率以及功率变化如图4所示。
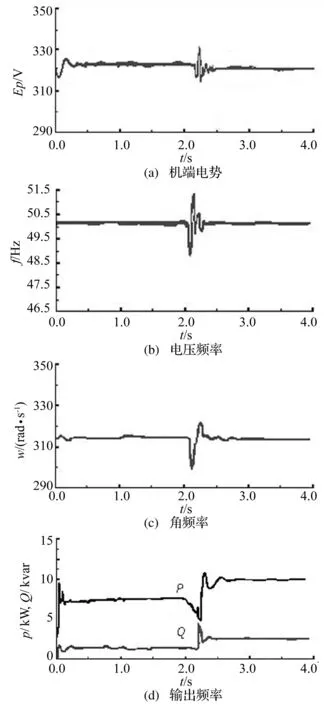
图4 并网运行特性图
由图4(a)可知,在并网过程中电压出现了一定的波动,为了满足并网的要求,同步逆变器根据电网情况调整输出。从图4(b)、图4(c)可以看出,在并网前逆变器交流侧电压相位滞后于电网电压,为了达到并网条件,储能系统的输出功率增大,输出电压矢量旋转速度增加,追踪上电网电压相位,并网后电压频率趋于稳定。从图4(d)输出的有功和无功变化可以看出,在并网过程中VSG算法中的调节器为并网过程提供了很好的阻尼惯性。
由以上仿真结果可知,所研究的并网前实现并网逆变器输出电压特性追踪电网电压,在外加控制器的控制调节下,使并网过程中对大电网产生的冲击电流降低,实现了分布式电源的安全可靠并网。
4 结束语
本文所采用的并网逆变器预先与电网电压特性比较,经调节器作用后改变逆变器的输出特性,以达到同步并网的目的,基本上能够满足电网侧与并网逆变器侧输出的电压特性保持一致。在并网前采集电网电压参数信息,在虚拟同步发电机的功频和励磁控制器的作用下,通过预同步控制器的比较运算对同步逆变器是输出侧的电压特性进行调节,使光伏单元和储能系统的输出满足并网要求。传统的同步发电机在制造工艺上可以完美地进行限制,使其按照预期的工况运行,但同步逆变器中的受元件性各方面的影像因素比较多,系统中主电路参数和控制器参数的设计比较灵活,为使电压特性调节变化更快速、更合理,需要不断地进行参数的优化使整个系统处于比较理想的状态。
猜你喜欢
河北电力技术(2021年2期)2021-07-29
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
通信电源技术(2018年3期)2018-06-26
电子制作(2018年1期)2018-04-04
能源(2017年12期)2018-01-31
大电机技术(2017年3期)2017-06-05
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
