
铁板料垛自动分张机构机械系统设计
2018-07-31 08:10:22任项洋
西部皮革 2018年12期
任项洋
(江苏师范大学,江苏 徐州 221000)
1 引言
在产品的加工生产环境中,自动化设备的使用程度呈上升趋势。增加与提升自动化设备的质量与数量对其发展有着重要意义。它的结构性能的好坏程度在自动化生产中有着重要影响,对其生产有着重要意义。为了充分利用自动化设备的优势,在设计过程中必须使其机械部分具有运动高精度、结构轻量化与高可靠性的特点。同时,自动化装置的其他机构组件都是以它的本体为框架进行设计安装的,不但要实现说设计的系统满足设计的要求,而且对它外形的设计也有着重要的考量,使整个自动化设备的各个单元结构能够合理有效的装置在一起,做到合理布局、操作方便与造型美观[16]。
本章将根据其分张特点,确定铁皮自动分张的整体机械结构形式,并对各个运动组件进行详细设计,包括抓取吸附装置、垂直运动组件、旋转运动组件等部分。
2 机械系统结构设计
在铁板料垛的自动化生产中存在着一些难题,就是如何保证成堆的铁皮实现单张分离。铁皮都是成堆堆放在一起,所以他们之间就会产生黏连,原因之一是铁片在生产过程中之间有少量的油,第二是铁皮由于长时间堆放在那里,由于重量和片料的平整关系,片料之间会产生负压,造成黏连。所以在这里设计该机构,能够更好的实现单张分离,能够适当的减少两张铁皮粘连在一起分离。
2.1 机械系统设计原则
实现自动化分张对油漆刷的生产具有重大意义。本文中研发的油漆刷的铁皮分张自动上料设备是实现整个工厂自动化的最重要的不封,其运行的稳定性与高效率性是最基本的要求[17]。
油漆刷的铁皮分张自动设备的整体要求如下:
(1)能够按照频率周期,准确地完成铁皮上料任务;
(2)整个系统结构合理、传动平稳、可靠性好且噪音小;
(3)支持自动、手动两种模式运行,手动运行时,各部件可以独立运行,方便设备调试以及故障的处理;
(4)合理布局,降低成本;
(5)操作面板简便,且能够几率输送铁板的数量。
2.2 机械结构设计方案
本文中设计的板材自动上料机械系统由三大部分组成:吸附装置、气缸升降装置与旋转装置这三大组成部分。吸附装置为本系统中最核心的部分,负责完成将铁皮逐层抓起的任务。气缸升降装置与旋转装置为辅助部分。其中,气缸升降装置负责通过气缸的伸缩带动真空吸盘上下移动,气缸下降一定的高度吸住铁皮,然后气缸上升带动吸盘,然后旋转装置电机通过plc带动吸住的铁皮旋转到下一道工序的加工位置上。如图所示为机构的整体方案图
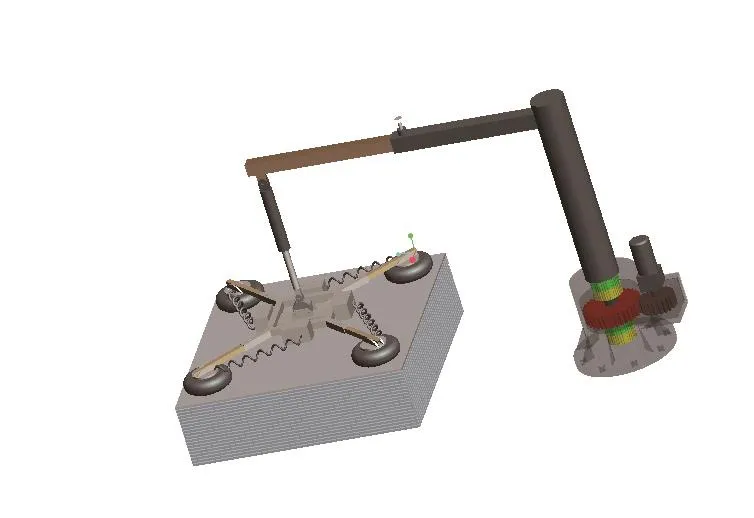
图3-1 铁板料剁自动分张系统三维图
3 吸附装置的设计
在吸附装置的设计中,我们选择真空吸盘来对成垛的铁皮进行分张,通过真空发生器对真空吸盘抽真空,产生负压,吸住铁皮,通过固定在铁皮两侧的齿板以及固定在支架上的鼓吹装置进行辅助分离,由于铁皮长期放置在那里,铁皮与铁皮之间产生粘力,这样设计能够更好地实现单张分离。
3.1 真空吸盘的选定
真空吸盘采用的是真空原理,通过产生的负压“吸附”工件表面以达到抓取工件的目的,把真空吸盘与真空发生装置连接在一起,在真空发生装置启动后,通过该装置将吸盘里面的空气抽走,吸盘形成负压[18]。此时,吸盘内部的空气压力低于大气压力,在外力的作用下,铁皮被吸盘吸住。吸盘的吸附力由吸盘内的真空度决定,真空度越高,吸附力就越大。在对面积较大、重量重的物料,或者是要求快速搬运的场合,为了防止吸吊物脱落,通常使用多个吸盘共同使用进行吸吊。在本设计中,铁皮的面积较大,所以选用4 个直径相等的真空吸盘对铁皮进行抓取。其吸盘直径 D 可按照下式进行选定:
根据设计的要求,我们选择4个吸盘。经计算 D ≥ 58.36 mm。此处选择常用系列的吸盘直径 D = 63 mm,形状选择SMC双层波纹式吸盘,型号为 HB63,由于我们的铁皮面积不是很大,所以均匀的分布四个吸盘即可。
3.2 真空发生器的选型设计
在选定真空吸盘的具体类型后,需要针对所选的真空吸盘选择合理的真空发生装置[19]。真空发生装置有很多,常见的有真空泵和真空发生器两种。其中真空发生器工作的原理是利用喷管高速喷射压缩空气,在喷管出口形成射流,产生气体卷吸流动。在卷吸作用下,使喷管出口周围的空气不断地被抽走,使吸附腔内的气压不断下降,从而形成一定真空度。
由流体力学可知,对于不可压缩的气体的连续性方程为:
按照不可压缩空气的伯努利理想能量方程:
因此当,一定时,的大小和 的大小成反比。当增加时,将持续减小,当P减少到一定值的时候,吸盘就会产生负压。所以通过流速的增加来使压强减小,从而产生较大的吸力。
真空发生器按照最大吸入流量 来选定,其计算公式为:

上文已选定采用 4 个均布的直径为 63mm 的真空吸盘对铁皮进行抓取,由计算可以初步选择型号为 EV-25HS-CK 的真空发生器,实物图如图3-4所示,其喷嘴直径为 2.5mm,极限吸入流量为 80 L/min(ANR)。

图3-4 真空发生器
3.3 吸附支架的设计
如图3-5所示,即是支架的三维简图。吸附支架是整个机构中最重要的部分,在吸附支架上布置的原件也很多,真空吸盘,真空发生装置等都要装置在上面。真空吸盘在支架上的安装位置需要随着铁皮的大小而做出改变,在这里可以选择把吸盘做成可移动的,频繁的移动吸盘,容易是真空吸盘受损,会使它的使用寿命降低。同时,也可以把安装吸盘的支架做出成伸缩杆,通过螺母来固定伸缩杆,需要改变距离时,只需要通过旋转螺母调节它的伸出量,就能改变真空吸盘的位置,这样对真空吸盘的使用寿命也有着大的提升。在铁皮的尺寸改变时,调节螺母,改变伸长率,就能够满足不同尺寸铁皮的分张。而且,在支架上还可以装置鼓吹装置,因为铁皮之间的粘附力的影响,当真空吸盘抽真空吸附的同时带动鼓吹装置也开始运作,即可更好的实现分张。在这里设计的吸盘支架的四个角装吸盘,在中间部位装置真空发生器等装置。
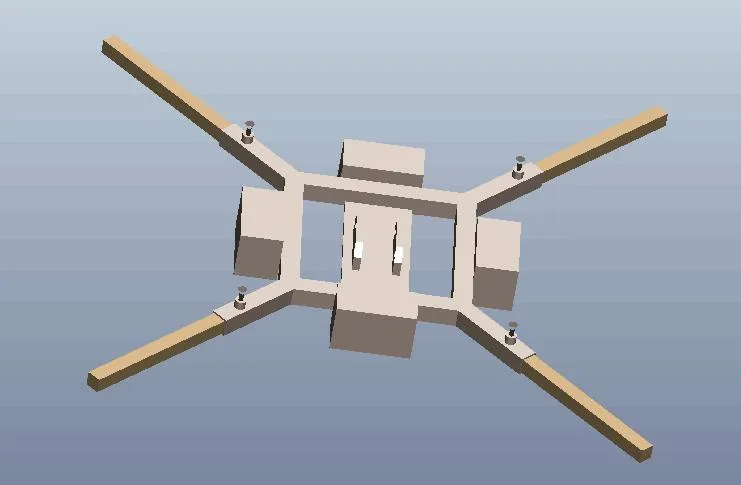
图3-5 支架的三维模型
4 提升装置的设计
提升装置主要靠气缸带动真空吸盘支架上下移动,所以对气缸的选型尤其重要。
在工业气动系统中,使用最频繁、最重要的气动执行元件就是气缸,它将压力能转化为机械能,通过转化用来驱动机械机构运动[20]。根据气缸使用条件的不同,可分成多种类型,如单作用、双作用气缸,活塞式、薄膜式、伸缩式气缸等,不同类型气缸的适用条件、使用要求以及侧重点各不相同,选择合适的气缸至关重要[21]。在本次设计当中即利用气缸的动力来带动吸附支架完成吸盘的提升工作。
根据计算,选择缸径为90mm的气缸就能够满足机构的基本要求。如图3-6所示即为提升装置的三维简图

图3-6 提升装置的三维简图
5 旋转机构的设计
在所涉及的机构中,还需要一种机构,就是旋转机构。旋转机构由两个部分组成,一部分是旋转臂,另一部分是电动机,电动机和旋转通过齿轮相连,在如图3-7所示的三维图中,旋转臂的立柱一侧安置电机,电机的齿和立柱里面的齿轮啮合,从而带动机械臂旋转。
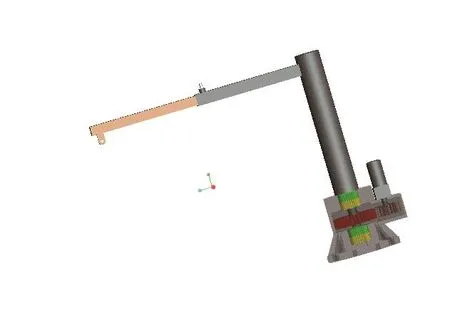
图3-7 旋转机构的三维图
设计旋转机构的目的是为了把分好的铁皮放到下一道工序的工位上,而且所设计的旋转臂需要能够正反转,目的是使铁皮连续分张,提高分张效率。通过PLC控制电机的正反转,从而实现铁皮的自动分张功能,具体流程当铁皮到达下料位置后上料机械手下降,释放物料,上料机械手上升到一定位置,控制电动机反转,到达初始位置,继续分张。该机构中在旋转臂上也设计了伸缩杆,可以调节旋转臂的回转半径,根据现实情况调节它,更好的实现分张。
6 总结
本章中主要介绍了机械系统设计原则以及设计要求,给出了适合本课题整体的设计方案,对吸附装置,提升装置,旋转装置各组件的设计进行了研究分析,并使用三维软件Pro/E对各部分三维建模,并给出了整体方案设计图。
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:55:14
数学大王·中高年级(2020年12期)2020-12-31 07:28:26
趣味(语文)(2020年4期)2020-07-27 01:43:14
模具制造(2019年4期)2019-06-24 03:36:42
现代园艺(2018年2期)2018-03-15 08:00:05
临床医药文献杂志(电子版)(2017年11期)2017-05-17 04:48:02
中国医学装备(2016年6期)2016-12-01 06:44:20
科技创新导报(2016年9期)2016-05-14 09:12:16
自动化博览(2014年6期)2014-02-28 22:32:19
汽车与新动力(2014年4期)2014-02-27 12:10:39
