
基于激光扫描的飞机点云预处理技术∗
2018-07-31 02:06冯上朝
计算机与数字工程 2018年7期
冯上朝 刘 莎
(陕西铁路工程职业技术学院 渭南 714099)
1 引言
按照发达国家对航空隐身技术试验要求,先进飞行器隐身性能试验与测试技术研究主要包括雷达隐身和光学隐身试验技术研究。
某型飞机是现役主战装备之一,在其研制总要求中已明确提出进行飞机的RCS、红外辐射特性的动静态测量。基于该型机的三维数字化模型,利用电磁散射、红外辐射等相关理论,对其目标特性信息进行分析计算,结合实际测量,建立起能服务于工程该型飞机的电磁、红外模型。
本研究课题以上述需求为依托,利用三维激光扫描仪对该型机进行全机三维数字化测量,获取其点云数据模型,然后,利用点云预处理技术,对点云数据作进一步数据处理,经过曲线构造,曲面构型,才能得到满足测试需要的飞机CAD实体模型。点云数据预处理是数字化建模流程的一个重要环节,其结果直接影响到飞机模型的质量,因此需要需要对点云数据预处理技术进行研究,本文对点云预处理的三个阶段,提出了相应的算法,经过试验验证,利用三种算法处理的点云数据效果,完全满足后续模型构建的精度要求。
∗ 收稿日期:2018年1月8日,修回日期:2018年2月24日
基金项目:国家自然科学基金项目“智能Kalman滤波理论及在飞行测试中的应用”(编号:61773147)资助。
作者简介:冯上朝,男,硕士研究生,工程师,研究方向:精密工程测量技术。刘莎,女,硕士研究生,工程师,研究方向:精密工程测量技术。
2 激光点云数据采集
激光点云数据采集是逆向建模工作中重要的一环,数据采集的完整性和质量直接影响后续建模的工作量和建模精度。因此,在点云采集前,做好测试方案。在本课题中,利用德国Z+F三维激光扫描仪对飞机外形轮廓进行数据采集[1],受到该设备视场的限制,需要分层,分区架多个测站才能全方位、无死角采集到所有外形数据。根据飞机大小,将分4个层次进行立体数据采集,如图2所示。为保证扫描全程的全局精度,在扫描前,将激光靶球分4个层次(高度和扫描仪架设高度大致相同)均匀布置,利用高精度三维测量设备测量靶球,建立全局控制场,用于后续各测站的数据融合[2]。

图1 Z+F三维激光扫描仪

图2 测站分布图

图3 激光扫描靶标

图4 高精度三维测量设备
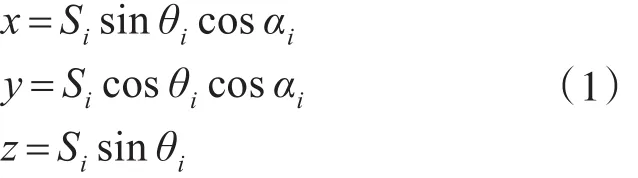
实际工作时,三维激光扫描仪通过内置激光测距仪测得斜距Si,内置编码器测得每个扫描方位角度观测值αi和俯仰扫描角度观测值θi;利用距离值和角度值计算扫描点的三维坐标值,通过如下公式计算出当前测站坐标系坐标值(x,y,z)[3]。
3 点云数据预处理技术
目前,非接触式测量方法在工业界得到越来越广泛的应用,这种测量方法测得的数据非常庞大,并常常带有许多的杂点、噪声点,影响后续的曲线、曲面重构过程[4]。因此,需在曲面重构前,对点云进行一些必要的处理,以获得满意的数据,为曲面重构过程做好准备,即点云预处理[5]。预处理工作流程大致如图5所示。

图5 点云数据处理流程图
3.1 点云曲面特征估算
点云曲面特征估算是点云处理技术的基础。激光扫描点云是紊乱的,孤立的点之间无明显拓扑关系[6],因此需要通过搜寻点云中的每个点的邻域信息,重建拓扑关系,才能估算出点的曲率等曲面特征[7]。
点云曲面特征估算主要包括三个内容:点云的K邻域搜索[8],点云的法向量计算和点云的曲率计算。
1)点云的K邻域搜索
采用基于kd-tree的邻域查找方法进行。
2)点云的法向量计算
通过将点P的K邻域拟合一个微切平面,将微切平面的法向量作为点P的法向量[9]。
3)点云的曲率计算
通过将点P的K邻域拟合一个二次参数曲面[10],估算点P的曲率。
3.2 基于局部离群系数的离群点去噪算法
由于实际测量过程中,一方面存在夹具、固定物等各种明显的误差点,需要手动剔除;另一方面,受到各种人为或随机因素的影响,使得测量结果包含噪声,为了降低或消除噪声对后序建模质量的影响,有必要对测量点云作必要的滤波和光顺处理,以得到精确的模型[11]。
本文采用基于局部离群系数的离群点滤除算法。定义局部离群系数[12]

算法实现:
1)通过对激光扫描点云进行区域增长,选出远离群点,滤除远离群点;
2)计算点云的曲面变化度,并把曲面变化度大的点标记为潜在离群点;
3)计算潜在离群点的局部离群系数,把大于离群系数阈值的标记为近离群点,进行滤除。
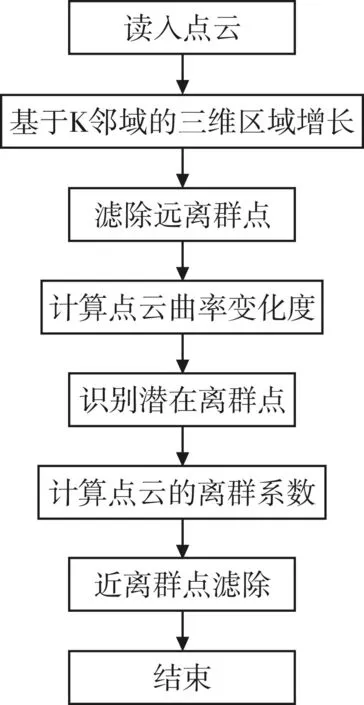
图6 算法流程图
3.3 基于靶球改进的点云对齐算法
在利用三维激光扫描仪对飞机扫描前,需要借助全站仪测量飞机特征点,建立全局机体坐标系;然后,利用全站仪测出布控靶球在机体坐标系下的三维坐标值[13]。
由于三维激光扫描仪每个测站采集的点云坐标基准是设备坐标系,因此,在后续点云处理时,需要借助每个测站测量的布控靶球作为中间桥梁,进行坐标系的统一,使之为全局机体坐标系[14]。

图7 点云对齐流程图
以第一站和第二站为例,将第一测站设备坐标系为基准,第二测站的点云数据通过公共靶球,采用改进的对齐算法,精确对齐到第1测站;最后,将第一测站的空间基准,通过公共靶球,对齐到飞机机体坐标系下。其它测站对齐,同前所述。
基于特征点改进的精确对齐算法:
1)首先,利用公共靶球在两个测站A、B下的设备坐标系坐标值,将B测站的点云数据空间基准对齐到A下,实现粗对齐;
2)在粗配准的基础上,采用ICP(最邻近迭代算法)四元素法计算变换参数R和T,实现精配准。算法内容包括基于KDTree搜索对应点对和矩阵变换参数的计算,分别介绍如下:
(1)基于KDTree搜索对应点对:根据KDTree遍历搜寻最近邻域点集,通过在邻域点集中找距离最小的点与搜寻点构成对应点对;
(2)四元素法计算变换矩阵
算法具体实现:
1)计算两个点集P,Q的重心坐标L1,L2;
2)点云重心化

3)构建N矩阵,其中

4)计算矩阵N的特征值,取其中最大特征值,并计算其对应的特征向量,表示为(W,X,Y,Z);
5)构建旋转矩阵R;

计算平移量T;

3.4 点云精简
为了在点云尤其是海量点云精简的精度、简度和速度之间取得一个较好的平衡点,本文提出了一种改进曲率精简算法,尽可能集合两者的优点并削弱两种的缺点[15]。
原理:
1)首先,采用相邻角阈值法,提取出在精简过程中需要保留的点云边界特征点;
2)然后,根据点云密度设定一个曲率阈值点和曲率极值点,求出点云中每个数据点的对应的精简距离;
3)最后,遍历整个点云,将小于精简距离的K邻域点删除,完成点云精简。
具体算法实现:
1)运用K邻域二次参数曲面拟合法,计算每个点的曲率;
2)提取点云边界特征点,精简过程中保留;
3)对点云的平均曲率进行排序,根据精简比例定曲率阈值;
4)根据曲率阈值与曲率极值对点云分区,归类;
5)计算点的精简距离阈值。
4 工程试验与分析
本次试验,利用德国Z+F三维激光扫描仪对飞机外形轮廓进行数据采集,受到设备视场的限制,需要分4层,分区架12个测站才能全方位、无死角采集到所有外形数据。
试验情况分析:
1)共架测站10站,飞机原始点云数据6400万点;
2)远离群点滤除:区域增长R为0.25,点数<100,且体积<2的点团滤除;
近离群点滤除:离群系数>2.5的点,对其滤除;
3)粗对齐误差2.8mm;精对齐误差0.02mm;

图8 噪声选取

图9 对齐误差分析

图10 精简前6400万点
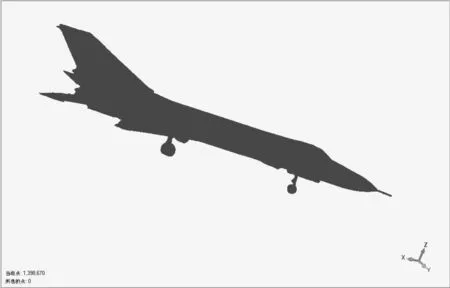
图11 精简后1920万点
4)精简后的飞机点云数据为1920万点,精简了70%;
5)精度检测:“垂尾前沿”长度与真实值作差0.06mm;空速管长度与真实值作差0.01mm;机翼前沿长度与真实值作差0.1mm。
5 结语
经过工程试验验证,本文提出的去噪算法适用性强,滤除效果好;点云对齐算法稳健性强,对齐精度高;点云精简算法在保持边界特征的同时,在曲率大的区域保留较多的点,曲率小的区域保留较少的点,提高了后期的模型处理效率。
猜你喜欢
计算机与现代化(2022年10期)2022-10-18
测绘地理信息(2022年2期)2022-04-02
计算机技术与发展(2021年6期)2021-07-06
家庭影院技术(2020年10期)2020-12-14
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
当代陕西(2018年24期)2019-01-21
诗选刊(2018年7期)2018-07-09
环球市场信息导报(2017年36期)2017-12-24
阅读(中年级)(2016年4期)2016-11-19
