一种倾转旋翼无人机螺旋桨的设计及性能分析
2018-07-30 02:39刘远强佟胜喜
沈阳航空航天大学学报 2018年3期
吴 江,刘远强,高 峰,佟胜喜
(沈阳航空航天大学 辽宁省通用航空重点实验室,沈阳 110136)
目前,针对倾转旋翼无人机的研究多集中在飞行控制和气动特性分析方面。许长春[1]以倾转旋翼无人机为研究对象,通过建立无人机飞行力学模型研究其飞行动力学特性,进行了控制系统的设计和数学仿真。齐赞强[2]设计了一种新构型的倾转四旋翼无人机,基于计算流体力学的数值计算方法计算和分析了该无人机气动特性和干扰规律。薛立鹏等[3]基于自由尾迹分析方法建立了倾转旋翼的气动特性分析模型,提出了倾转旋翼气动多目标协同优化策略,对桨叶气动外形进行了优化设计。招启军等[4]针对倾转旋翼工作模式特点,将CFD方法与优化方法相结合,建立了一套倾转旋翼/螺旋桨气动外形综合优化设计方法。
针对适用于倾转旋翼无人机的螺旋桨的研究尚不多见。现有的实用的螺旋桨设计方法基于的理论基础可以分为两种,一种是基于叶素力矩理论,一种是基于涡流理论。基于以上理论,在20世纪70年代至90年代许多学者进行了航空螺旋桨设计与分析方法的研究[5-10]。近些年,随着通用飞机和无人机研究的发展,螺旋桨的研究重新引起了国内外学者的重视。项松等[11]基于叶素力矩理论,提出了一种高效螺旋桨设计方法,在给定工况的前提下,获得了弦长和桨距角沿着桨叶径向的分布,完成了一款高效率螺旋桨的设计。Hepperle M[12]提出了一种给定弦长分布的螺旋桨的逆向设计方法。Traub L W[13]基于涡流理论,提出了一种考虑失速影响的螺旋桨设计、分析方法,该方法适合于螺旋桨的概念设计和初步设计。Wisniewski C F等[14]通过试验的方法研究了翼型、桨尖几何形状、雷诺数、弦长分布等对小型螺旋桨性能和噪声的影响。Dorfling J,Rokhsaz K[15]提出了一种通过变分法进行螺旋桨优化的方法,并给出了基于欧拉拉格朗日方程对约束及非约束条件下螺旋桨桨叶扭转进行优化的流程。
现有螺旋桨设计方法多针对固定翼油动飞机,对螺旋桨效率要求不高,且一般仅考虑一个工况,很难满足倾转旋翼无人机对于多个工况的需求。本文基于涡流理论,提出了一种螺旋桨设计流程,使用该流程能准确地得到满足巡航及起降状态拉力需求且巡航效率高的螺旋桨特征参数,非常适合于倾转旋翼无人机的螺旋桨设计。利用该设计流程针对某型倾转旋翼无人机的技术要求,设计了一款15英寸的固定桨距螺旋桨,经计算分析该螺旋桨能满足倾转旋翼无人机巡航工作效率高和起降、悬停状态拉力大的需要。
1 螺旋桨设计理论
1.1 理论基础
螺旋桨桨叶沿展向任意位置r处,气流速度与攻角之间的几何关系,以及涡流速度与攻角之间的关系,如图1所示。
基于Goldstein涡流理论和儒可夫斯基的螺旋桨涡流理论,可以得到公式(1)
α(r)]=0
(1)
公式(1)中,B为螺旋桨桨叶数,r为沿桨叶展向的圆周站位位置,对应桨叶r站位位置c(r)为局部的弦长,cl(r)为局部升力系数,αi(r)为局部诱导攻角,α∞(r)为来流攻角,F(r)为翼尖损失系数。
F(r) 如公式(2)所示
(2)

图1 局部速度分量与攻角的关系
公式(2)中,βtip为桨尖处的桨距角,可由公式(3)计算得到
(3)
公式(3)中,P为螺旋桨桨距。
由图1中上下两图,分别求解诱导速度轴向分量Vix,可以得出局部诱导攻角αi(r)的计算公式(4)
(4)
公式(4)中,ω0为尾流位移速度,ω为螺旋桨转速。
不考虑诱导速度的影响,来流攻角可由公式(5)计算
(5)
桨叶r站位位置的局部雷诺数Re(r)可由公式(6)计算得到
(6)
桨叶r站位位置的桨距角可由公式(7)计算
βch(r)=αi(r)+α(r)+α(r)+αzl
(7)
公式(7)中,α(r)为局部的几何攻角,αzl为局部翼型的零升攻角。
螺旋桨的拉力可由公式(8)计算得到
(8)
公式(8)中,hub为桨毂位置计算截止面,cD(r)为局部翼型的阻力系数。
螺旋桨的扭矩可由公式(9)计算得到
(9)
螺旋桨效率可由公式(10)计算得到
(10)
公式(10)中,前进比J可由公式(11)计算得到,拉力系数CT可由公式(12)计算得到,扭矩系数CQ可由公式(13)计算得到
(11)
(12)
(13)
公式(11)、(12)、(13)中的n为转速,单位为转每秒,D为螺旋桨直径。
1.2 螺旋桨设计流程
(1)给定工况需求,包括螺旋桨的工作转速ω、来流速度V∞、拉力需求T0等;
(2)确定桨叶半径R、桨距P、桨叶数B、桨毂位置计算截止面hub、沿桨叶展向的选定截面站位分布及翼型;
(3)给定ω0初始值;
(4)选取一定的弦长分布策略,确定弦长分布c(r);
(5)由公式(3)确定βtip、由公式(5)确定α∞(r)、由公式(4)确定αi(r);
(6)依据选取的截面站位分布,从桨根某一起始位置至桨尖,由公式(1)计算对应截面位置的cl(r);
(7)由公式(6)求得站位截面的局部雷诺数,利用XFOIL软件计算,确定对应截面的α(r)、αzl、cD(r);
(8)利用公式(8)求得螺旋桨的拉力T;
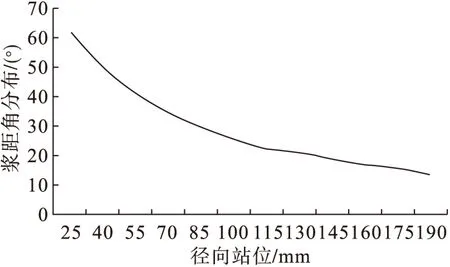
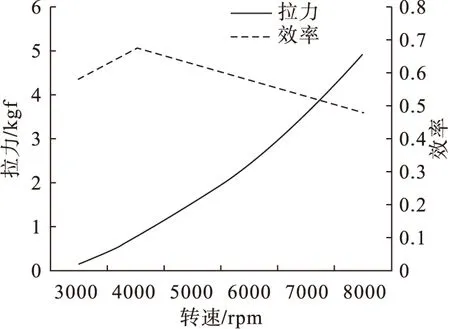
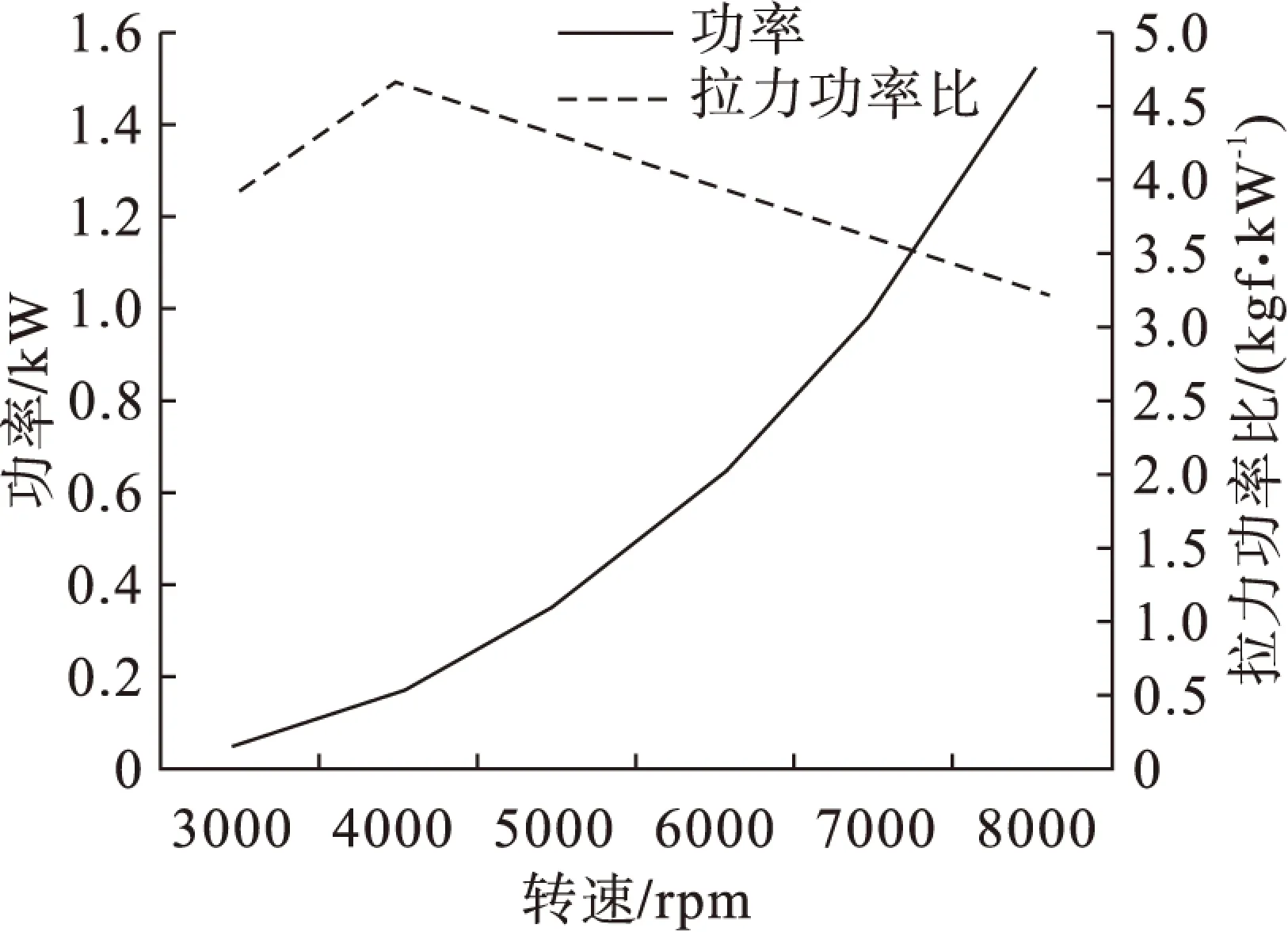
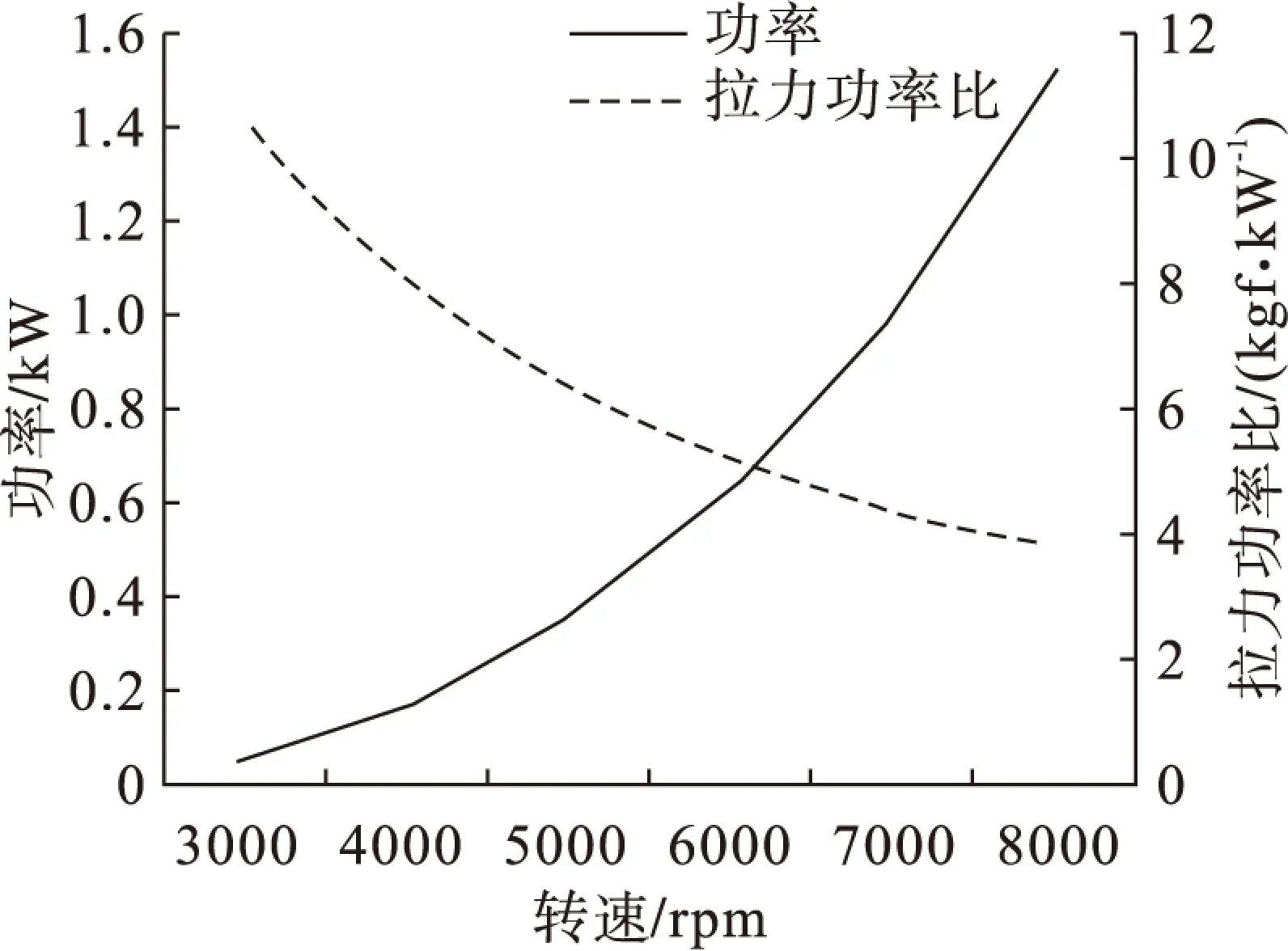
(9)如果拉力不能满足需求,即T (10)由弦长分布策略得到最终的弦长分布c(r)、由公式(7)得到最终的桨距角分布βch(r)。 该款无人机最大起飞重量12 kg,巡航速度15 m/s,起降阶段为4旋翼模式,平飞阶段2个旋翼进行倾转拉动飞机前飞,起降阶段预计飞行时长2 min至3 min,平飞续航能力预计为1.5 h。依据气动计算,整机的升阻比约为10至15,现有电机工作转速范围为3 000~8 000 rpm。 从飞机的设计技术要求分析,飞机有两个主要工况。工况一是垂直起降阶段,4旋翼工作,来流速度接近0,单个螺旋桨的拉力需求为3 kgf;工况二是平飞巡航阶段,2个螺旋桨工作,来流速度为15 m/s,单个螺旋桨的拉力需求为0.6 kgf。 依据工况一进行设计,螺旋桨桨距角偏小,爬升阶段效率高,巡航阶段效率偏低;依据工况二进行设计,螺旋桨桨距角较大,巡航阶段效率高,爬升阶段效率低。由于飞机的主要工况是平飞(平飞时长与爬升时长比约为30至45),因此螺旋桨设计以工况二为主,同时要兼顾工况一下的拉力需求。因此,给定工况定义为工作转速4 000 rpm,来流速度15 m/s,拉力需求0.6 kgf,同时保证工作转速为7 000 rmp,来流速度为0 m/s时,拉力不小于3 kgf。 第一步,选定螺旋桨相关参数,根据飞机布局要求螺旋桨直径选为381 mm,桨叶数为2,考虑电机安装座的要求,桨叶径向站位截止面位置hub不小于25 mm。 第二步,进行翼型的选取,依据设计经验,截面翼型选择E214翼型,其平面形状如图2所示。 图2E214翼型 第三步,依据弦长分布策略,调整得到最终弦长分布,如图3所示。 图3 弦长分布 第四步,计算得到桨距角分布,如图4所示。 图4 桨距角分布 最终,依据选定的翼型,结合弦长及桨距角分布,考虑螺旋桨的强度要求及几何光顺性,利用CATIA软件建立螺旋桨的三维模型。螺旋桨模型如图5所示。 图5螺旋桨模型 利用CFD软件对于螺旋桨滑流的三维流场进行了数值模拟。计算模型采用非结构网格进行划分。网格数量为200万,网格如图6所示。 图6 螺旋桨表面网格 静止的流场域采用结构网格进行模拟,网格数量为168万,网格如图7所示。 图7 静止的流场域网格 两个流场域的交界面采用流体与流体耦合的形式进行计算。采用有限体积法对控制方程进行离散化。经计算,对应工况二的螺旋桨拉力及效率分布如图8所示,功率及拉力功率比分布如图9所示。 由于对应工况一来流速度为0,不考虑效率;对应工况一的拉力分布情况如图10所示,功率及拉力功率比分布如图11所示。 从分析结果(详见图8、图10)可以看到,所设计的螺旋桨在巡航状态下(即对应工作转速4 000 rpm,来流速度15 m/s),产生的拉力为0.65 kgf(大于0.6 kgf),此状态工作效率最高(约为0.68);在起降及悬停状态(对应工作转速7 000 rpm,来流速度0 m/s)的拉力为3.5 kgf(大于3 kgf)。螺旋桨性能可以满足设计要求。 图8 工况二拉力及效率分布 图9 工况二功率及拉力功率比分布 图10 工况一拉力分布 图11 工况一功率及拉力功率比分布 本文设计了一款用于某型倾转旋翼机的15英寸固定桨距螺旋桨,建立了该螺旋桨的三维CATIA模型,利用CFD软件进行了其性能的计算分析,分析结果显示该螺旋桨的性能可以满足设计要求。 设计实例表明本文提出的螺旋桨设计流程适用于倾转旋翼无人机对多工况工作的需求,对多工况固定桨距螺旋桨的设计进行了有益探索。2 某型倾转旋翼无人机用固定桨距螺旋桨的设计
2.1 工况分析
2.2 螺旋桨设计



3 螺旋桨性能分析



4 结论
猜你喜欢
科学技术创新(2022年23期)2022-07-25
今日农业(2021年8期)2021-11-28
水上消防(2021年3期)2021-08-21
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
人大建设(2019年5期)2019-10-08
人大建设(2019年3期)2019-07-13
固体火箭技术(2018年6期)2019-01-18
固体火箭技术(2014年3期)2014-03-15