基于ELM_AdaBoost强预测器的空战目标威胁评估
2018-07-27 03:09:20徐西蒙杨任农
系统工程与电子技术 2018年8期
徐西蒙, 杨任农, 符 颖, 赵 雨
(空军工程大学空管领航学院, 陕西 西安 710038)
0 引 言
空战目标威胁评估是指在某一空战环境中,根据对当前敌我态势和战场要素的感知推断敌方目标对我方威胁程度的大小[1]。随着空战环境的日益复杂和空空导弹等精确制导武器杀伤性能的不断提升,在空战中对目标机进行准确、快速地威胁评估不仅是空战态势感知的重要任务和迫切需求[2],也是战斗机进行目标分配、武器分配和战术机动决策的前提和基础[3]。
目前主流的目标威胁评估方法可以分为两类[4]:模型化方法和数据化方法。模型化方法通常是对威胁评估的过程进行建模,再设定一些评估指标函数对目标的威胁程度进行量化[5]。常用的有模糊推理、D-S(Dempster-shafer)证据理论、贝叶斯推理和威胁指数法等。例如文献[6]和文献[7]通过构建战斗机威胁评估参数的隶属度函数,提出了一种基于模糊逻辑的目标威胁评估方法;文献[8]针对不确定性条件,提出了一种基于云模型的目标威胁等级评估模型;文献[9]利用贝叶斯推理网络解决了目标威胁评估问题;文献[10]针对目标威胁评估问题,提出了威胁指数法。其中,威胁指数法(又称多属性决策法)最具代表性,使用也最为广泛。这类方法的优点在于评估结果准确可靠,说服力强;而缺陷在于模型比较复杂、计算量大、算法运行时间较长,在实际应用中不容易满足评估的实时性需求。
数据化方法是将目标威胁评估问题等效为非线性多元函数的预测问题[11]。通常是设定一些评估参数作为输入,以目标威胁程度作为输出,然后利用空战数据训练某种机器学习算法,对目标威胁程度值进行预测。例如文献[12-14]提出采用神经网络及其改进算法进行目标威胁评估;文献[15]提出采用回归型支持向量机进行目标威胁评估。这类方法的优点在于不需要对评估过程进行复杂的建模,而且机器学习算法经过训练后可以挖掘出目标威胁程度和评估参数之间的内在关系,使得评估过程的计算得到简化,进而减少评估时间,显著提高了评估的实时性;而缺陷在于所用的空战数据都比较少,导致模型训练不够充分、评估精度不能保证、评估结果说服力不强。
通过研究发现,模型化方法可以保证评估的准确性,但不能保证评估的实时性;而数据化方法可以保证实时性,却不能保证准确性。所以,寻找更好的目标威胁评估方法,使其具备较高准确性的同时又具备良好的实时性,是一个亟待解决的问题。
极限学习机(extreme learning machine,ELM)是一种单隐含层前馈神经网络,与一般前馈型神经网络不同,其用求解线性方程组的方式替代传统参数优化的迭代过程,解得具有最小范数的最小二乘解作为输出层网络权值,使网络训练可一次完成而无需迭代。而且网络输入权值和隐含层阈值随机设定且在训练过程中无需调整,使得ELM算法的参数选择比较简单,可以克服传统反向传播(back propagation, BP)神经网络训练速度慢、容易陷入局部极小值等缺点[16]。本文为了进一步提高算法的预测精度,借鉴了AdaBoost(adaptive Boosting)分类算法的思想,在ELM算法的基础上提出了一种ELM_AdaBoost算法,构造了ELM_AdaBoost强预测器。另外,针对传统数据化方法所用空战数据较少的问题,本文利用了空战训练测量仪(air combat maneuvering instrument, ACMI)中的空战数据,并用威胁指数法构造了目标威胁评估的样本数据。其中,ACMI是一种空战数据记录设备,可以实时采集、传输并保存战斗机的时间、位置、速度和姿态等数据,可为空战问题的研究提供大量客观真实的数据[17]。
基于以上考虑,本文在利用ACMI空战数据和威胁指数法的基础上,提出了一种基于ELM_AdaBoost强预测器的空战目标威胁评估新方法。该方法融合了传统模型化方法和数据化方法的优点,可以准确、快速地进行空战目标威胁评估。
1 ELM算法
(1)
式中,wi=[wi1,wi2,…,win]为输入节点和第i个隐含层节点之间的权值;βi为输出节点和第i个隐含层节点之间的权值;bi为第i个隐含层节点的阈值。

(2)
其矩阵形式可以表示为
Hβ=T
(3)
H(w1,…,wL,b1,…,bL,x1,…,xN)=
(4)
式中,H为隐含层输出矩阵,其第i列对应第i个隐含层节点的输出;β=[β1,β2,…,βL]T;T=[t1,t2,…,tN]T。
通过求解式(5)的最小二乘解来获得输出权值矩阵。
(5)
(6)
式中,H†为H的Moore-Penrose广义逆。
综上所述,ELM算法的基本步骤[19]如下:
步骤2随机设定输入层权值w和隐含层阈值β;
步骤3计算隐含层输出矩阵H;

2 ELM_AdaBoost算法
AdaBoost分类算法是由Freund和Schapire于1995年在改进Boosting算法的基础上提出的,其核心思想是合并多个弱分类器的输出形成强分类器,以实现更加精确的分类[20]。本文为了提高ELM算法的预测精度,在借鉴强分类器设计原理的基础上,将AdaBoost算法用于预测,选用ELM神经网络作为弱预测器,构造了基于ELM_AdaBoost算法的强预测器。
基本方法是设定一个阈值φ,用训练样本对ELM弱预测器进行训练,然后根据预测结果更新训练样本的权值分布,预测误差大于φ的样本增大其权值,预测误差小于φ的样本降低其权值,这样可以增加样本间的区分度,使预测误差较大的样本更加突出,在下一轮迭代中得到更多关注。保持训练样本数量不变,在新的权值分布下再次对ELM弱预测器进行训练,依此类推,训练M轮得到M个弱预测函数,给每个函数赋予一个权值,预测结果越好的对应权值越大,最终的强预测函数由弱预测函数加权得到。ELM_AdaBoost算法的具体步骤如下:
步骤2初始化训练样本的分布权值D0(j)=1/N,j=1,2,…,N,设定初始预测误差阈值φ0和初始预测误差和e0;
步骤3训练ELM弱预测器。训练第1个弱预测器时,用训练样本训练ELM神经网络并预测训练输出,得到预测序列h(1)的预测误差和e1。误差和e1的计算公式为
e1=∑D0(j),j:|h1(xj)-tj|>φ0
(7)
式中,h1(xj)为训练样本xj的预测值;tj为真实值。
步骤4更新训练样本权值。更新第2轮训练样本的权值,更新公式为
(8)
式中,B0是归一化因子,目的是在权值比例不变的情况下使分布权值和为1。
步骤5更新预测误差阈值。根据预测误差和自适应地更新预测误差阈值φ,更新公式为
(9)
这种方法的作用是随着预测误差的增大或减小,阈值φ也相应地增大或减小,使预测误差较大的样本在下一轮训练中可以获得更大的权值,预测器可以更加关注这些样本,进一步提高训练精度。
步骤6构造强预测函数。按照以上流程依次训练M轮,得到M组弱预测函数fi(x)(i=1,2,…,M),进而加权叠加得到强预测函数为
(10)
3 基于ELM_AdaBoost强预测器的目标威胁评估
3.1 威胁评估指标的确定
以一对一空战为例,双机态势如图1所示[21]。选取飞机坐标系OXYZ,以飞机质心为原点O;以机体纵轴为X轴,指向机头方向为正;以机体所在对称面垂直机体纵轴方向为Z轴,竖直向下方向为正;Y轴按照右手定则确定。其中,F和T分别代表我机和目标机,目标线FT是指我机到目标机的连线;R为相对距离;H为相对高度,规定为目标机高度值与我机高度值之差;VF和VT分别代表我机和目标机的速度矢量;φF为我机方位角;qT为目标机进入角;方位角与进入角的方向一致规定右偏为正,左偏为负,取值范围[-180°,180°]。
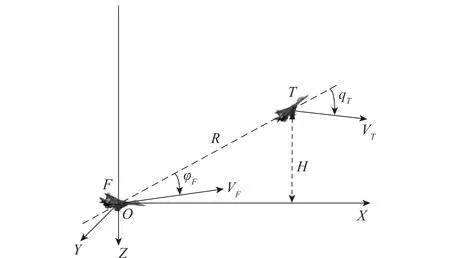
图1 双机空战态势图Fig.1 Dual air combat situation map
在瞬息万变的空战环境中,对目标机进行威胁评估需要考虑多方面的因素,例如天气、战场环境、敌我态势、武器性能、电子干扰等。因此,目标威胁评估是一个复杂的、非线性的多属性决策问题。本文为了将目标机对我机的威胁程度进行量化,选取了空战态势威胁指数和空战能力威胁指数两项指标。其中,空战态势威胁指数又包括角度威胁指数、速度威胁指数、高度威胁指数和距离威胁指数[22]。
(1) 角度威胁指数TA
(11)
(2) 速度威胁指数TV
(12)
(3) 高度威胁指数TH
(13)
(4) 距离威胁指数TR
计算目标机的距离威胁指数时,需要考虑敌我双方的机载雷达探测距离和空空导弹射程。本文用RrF和RrT分别代表我机和目标机的机载雷达最大探测距离,用RmF和RmT分别代表我机和目标机挂载空空导弹的最大射程。然后,分4种情况进行讨论:
①RrT,RrF,RmT>RmF
(14)
②RrF>RrT,RmT>RmF
(15)
③RrT>RrF,RmF>RmT
(16)
④RrF>RrT,RmF>RmT
(17)
(5) 空战能力威胁指数TC
由文献[23]可知,一般情况下战斗机的空战能力参数主要有7个,分别为机动性能、火力性能、探测性能、操纵性能、生存性能、航程系数和电子对抗性能,本文用ε1~ε7分别代表这7个参数。空战能力威胁指数TC可以表示为
TC=[lnε1+ln(∑ε2+1)+ln(∑ε3+1)]ε4ε5ε6ε7
(18)
由威胁指数法可知,目标机的威胁程度值T可以表示为各威胁指数的加权求和,即T=ωATA+ωVTV+ωHTH+ωRTR+ωCTC,其中,ω=(ωA,ωV,ωH,ωR,ωC)为5个威胁指数的权重。
确定了威胁评估指标后,本文采用模糊层次分析法得到各威胁指数的权重为ω=(0.16,0.14,0.17,0.23,0.30),具体计算方法参考文献[24],这里不再详述。
3.2 目标威胁评估样本数据的构造
本文在ACMI中选取了一段一对一空战数据,时长84 s,采样间隔0.25 s,共计336组数据。在惯性坐标系中绘制这一空战过程的双机轨迹,如图2所示,其中,假定蓝机代表我机,红机代表目标机。
这些数据中,每组都包含我机和目标机的机型、姿态、位置、速度和时间等参数。利用这些参数可以计算得到双机的空战态势参数。然后利用式(11)~式(18)可以计算出威胁指数TA,TV,TH,TR和TC,再结合各威胁指数的权重,就可以计算出每组数据中目标机对我机的威胁程度值T。由此,可以得到以空战态势参数R,H,VF,VT,φF和qT为输入,目标威胁程度值T为输出的336组新数据,将这些数据作为目标威胁评估的样本数据。
1.8 蛋白质印迹分析 收集细胞,用含蛋白酶抑制剂的 RIPA 细胞裂解液裂解,提取蛋白并定量。取 40 μL 总蛋白进行十二烷基硫酸钠-聚丙烯酰胺凝胶电泳,转膜后以 5% 脱脂牛奶溶液封闭 1 h,加入一抗于 4 ℃ 下孵育过夜,再加入二抗常温孵育 1 h。用 TBST 洗膜 3 次,每次 10 min。曝光,以内参 β-actin 为标准分析目的蛋白的相对表达量。
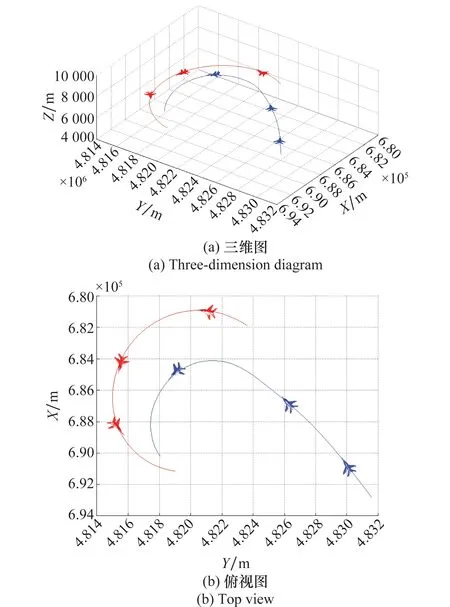
图2 空战数据轨迹图Fig.2 Track chart of air combat data
3.3 目标威胁评估模型
根据样本数据的输入和输出维数,可以确定ELM网络的输入层节点数为6,输出层节点数为1。然后,选取一定的训练样本对ELM弱预测器进行M轮训练,构造ELM_AdaBoost强预测器;再选取一定的测试样本,并利用强预测器进行目标威胁评估的仿真。这一方法的模型如图3所示。
由样本数据的构造过程和目标威胁评估模型可以看出,本文提出的方法是一种建立在威胁指数法基础上的数据化方法,但相比威胁指数法和传统数据化方法有了很大的改进。
威胁指数法作为典型的模型化方法,在进行目标威胁评估时,需要先利用当前获取的态势参数计算相应的威胁指数,再利用威胁指数计算目标机的威胁程度值;而ELM_AdaBoost强预测器经过训练后,可以把当前获取的态势参数作为输入,直接计算输出目标机的威胁程度值。因此,该方法可以简化目标威胁评估的计算过程,减少评估所用时间,进而提高了评估的效率和实时性。
传统数据化方法用于训练算法模型的样本数据数量很少,而且数据中目标的威胁程度值通常是利用一些比较简单的量化方法计算得到的,这样以来样本数据的可信度也不够高,导致模型训练不够充分,预测精度也比较低,评估结果说服力不强。而本文在ACMI中选取空战数据,并利用威胁指数法计算数据中目标的威胁程度值,这样既增加了样本数据的数量,也提高了样本数据的质量,使得算法模型得到很好地训练,保证了评估的准确性。
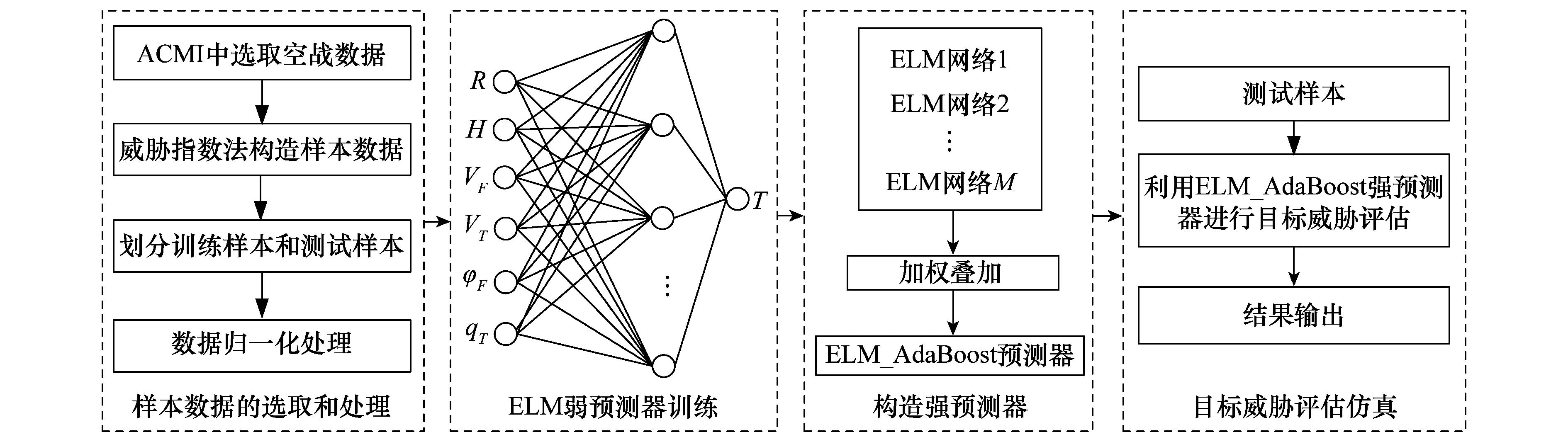
图3 目标威胁评估模型Fig.3 Target threat assessment model
4 仿真实验与分析
4.1 实验设置
根据图3所示模型进行空战目标威胁评估的仿真,将336组样本数据划分为训练样本和测试样本,其中,前236组数据作为训练样本,剩余100组数据作为测试样本。
另外,为了获取预测精度较好的ELM_AdaBoost强预测器,需要对ELM弱预测器的隐含层节点数L和弱预测器个数M进行选择。为此,本文将100组测试样本分为两部分,分别设定为测试样本1和测试样本2,且样本数都为50。测试样本1用于进行测试实验,以确定参数L和M;测试样本2用于对最终获得的强预测器进行测试,以观察其进行目标威胁评估的效果。与图2对应的各部分样本的空战阶段划分情况如图4所示。
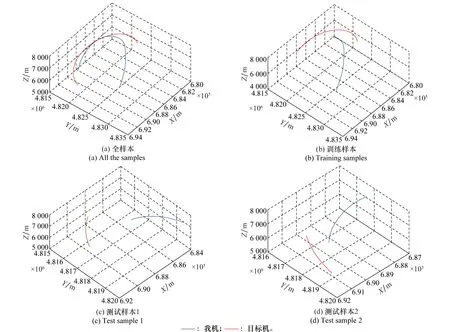
图4 样本空战阶段划分Fig.4 Air combat division of the samples
样本划分后,为了避免各参数取值范围差异较大带来的预测误差,对所有数据进行归一化处理。仿真实验在PC上进行,运行环境为:Intel(R) Core(TM) i5-4590 3.3 GHz处理器,4 GB内存,Win7 32位操作系统,运行平台为Matlab 2010a。为了使实验更具说服力,以下各仿真结果均为30次计算的平均值。
4.2 ELM网络隐含层节点数设定
ELM神经网络的隐含层节点数对网络的预测精度有较大影响。如果隐含层节点数过少,ELM网络不能很好地学习,预测误差较大;如果节点数过多,网络训练时间增加,而且容易出现过拟合的现象[25]。在实际应用中,最佳的隐含层节点数通常用测试实验的方法确定[26]。由Kolmogorov定理可知[27],对于单隐含层神经网络而言,若输入层节点数为,则隐含层节点数至少应设定为。为了兼顾网络的性能与训练成本,本文采用测试实验的方法,利用测试样本1在[13,30]区间内寻找可以使ELM网络预测精度相对较好的隐含层节点数L。
(19)

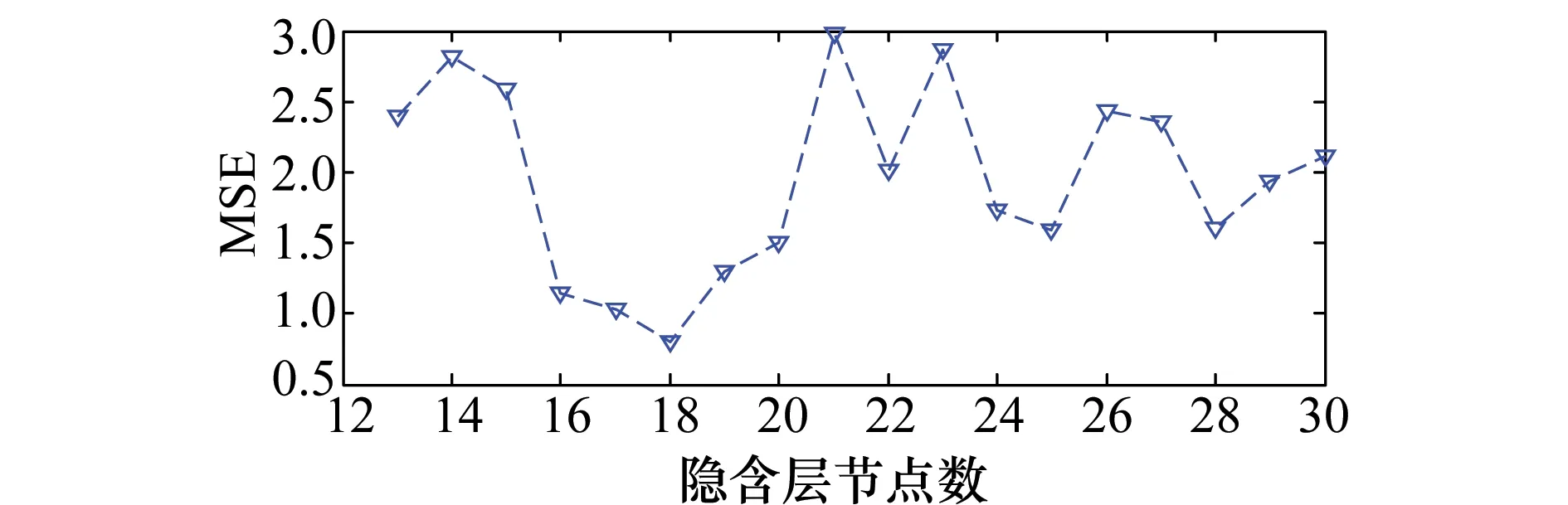
图5 隐含层节点数测试结果Fig.5 Testing results of the hidden layer nodes
由图5可以看出,在该区间内,当隐含层节点数为18时,ELM网络具有相对较好的预测精度。因此,在进行ELM弱预测器的训练时,设定隐含层节点数L=18。
4.3 ELM弱预测器个数设定
ELM_AdaBoost强预测器是由若干个ELM弱预测器叠加而成的,而弱预测器的个数同样对强预测器的预测精度有较大影响。如果弱预测器个数过少,则强预测器的泛化能力不会有明显的提高;如果个数过多,不仅会增加训练成本,也容易出现过拟合的现象。因此,本文为了构造预测精度较好的强预测器,且不耗费过大的训练成本,同样采用测试实验的方法,在[6,20]区间内寻找使ELM_AdaBoost强预测器预测精度相对较好的弱预测器个数M。
测试实验中,ELM弱预测器的参数设定同第4.2节,另外,设定初始预测误差阈值φ0=0.1,初始预测误差和e0=1。然后,在不同的弱预测器个数下,用训练样本训练ELM_AdaBoost强预测器,并对测试样本1进行预测,输出预测MSE。实验结果如图6所示。
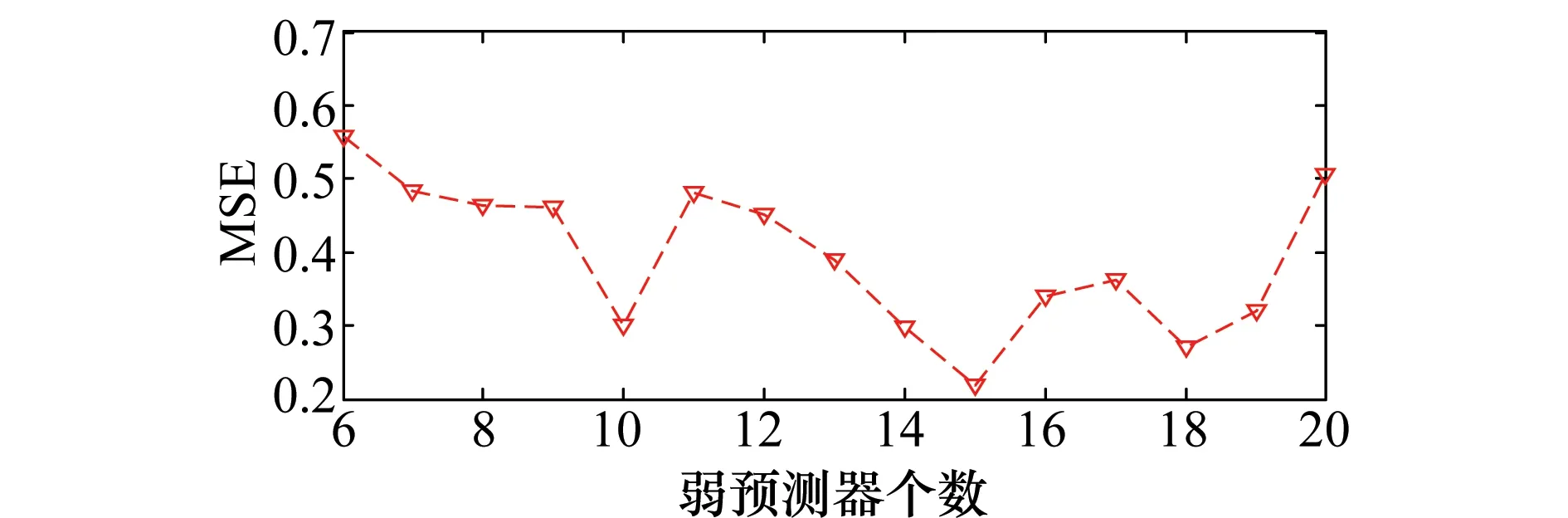
图6 弱预测器个数测试结果Fig.6 Testing results of the weaker predictor numbers
由图6可以看出,在本文实验条件下,ELM_AdaBoost强预测器的预测精度与弱预测器个数并没有直接的线性关系,即并不是弱预测器个数越多,预测精度越好,这与实际情况相符。在该区间内,当弱预测器个数为15时,强预测器具有相对较好的预测精度。因此,在进行ELM_AdaBoost强预测器的训练时,设定ELM弱预测器个数M=15。
4.4 目标威胁评估精度分析
在上述参数设定下,利用测试样本2分别对BP神经网络、ELM弱预测器和ELM_AdaBoost强预测器的评估精度进行测试,其中,BP网络的隐含层节点数也设定为18。实验结果如图7和图8所示。
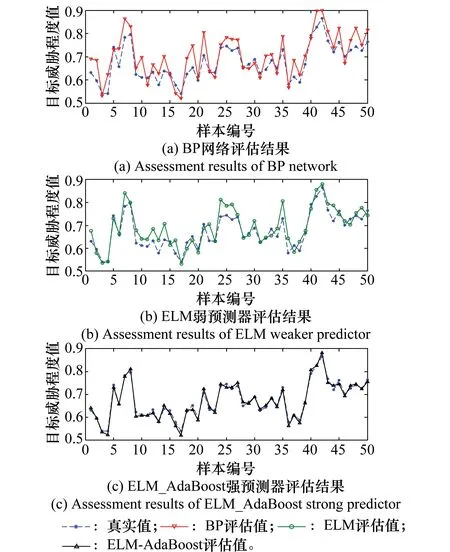
图7 测试样本2评估结果Fig.7 Assessment results of test sample 2
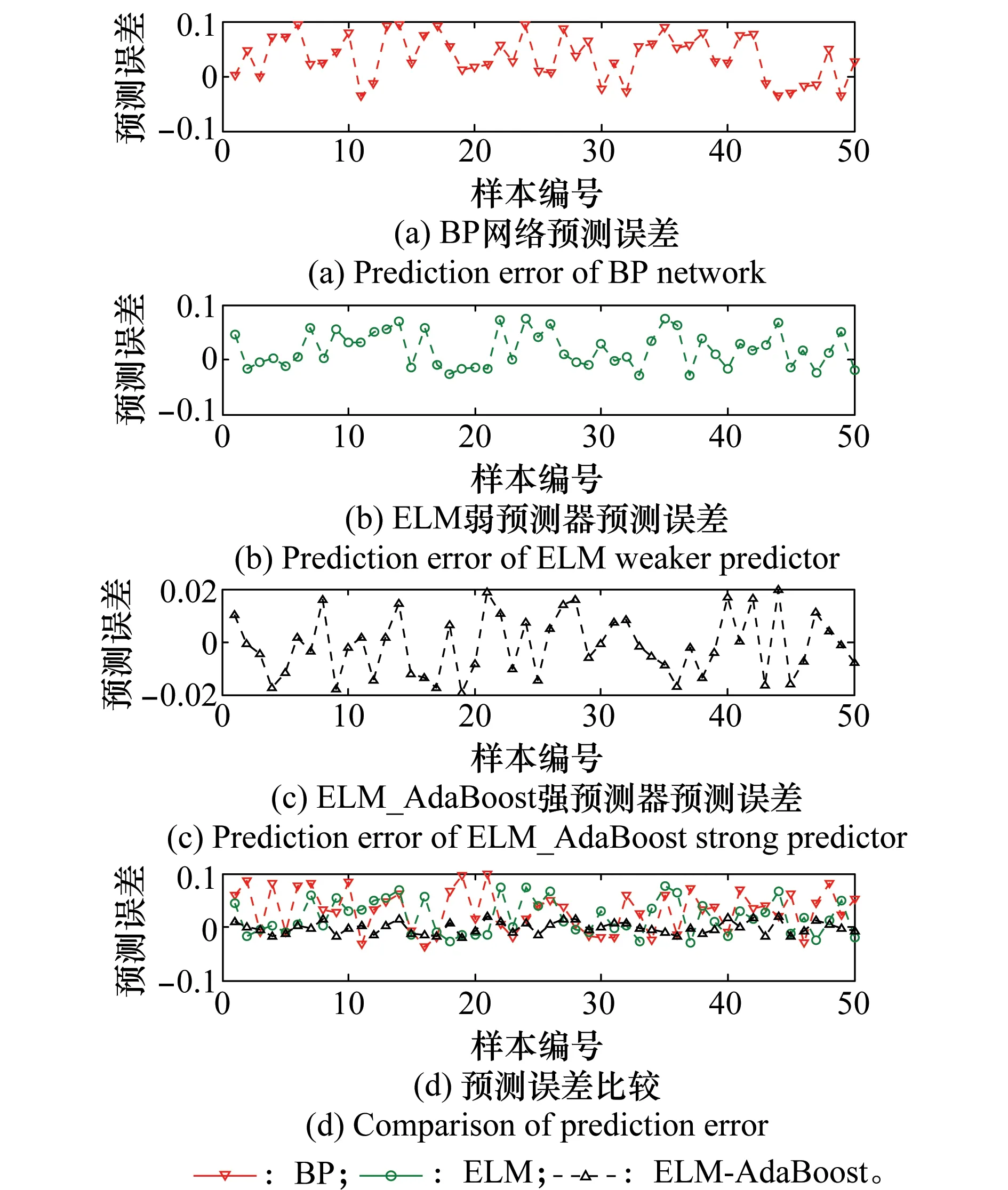
图8 测试样本2预测误差Fig.8 Prediction error of test sample 2
由图7和图8可以看出,在3种算法中,ELM_AdaBoost强预测器的评估效果最好,预测误差最小,不超过0.02,而另外两种算法预测误差相对较大,评估效果不够理想;ELM弱预测器的预测精度相比于BP神经网络并没有明显差别,而构造的ELM_AdaBoost强预测器在预测精度上有明显提升,可以对目标威胁程度值进行准确地评估。
4.5 目标威胁评估实时性分析
利用测试样本2分别计算BP神经网络、ELM弱预测器和ELM_AdaBoost强预测器3种算法在不同评估次数下的运行时间,并与威胁指数法进行比较,实验结果如图9所示。

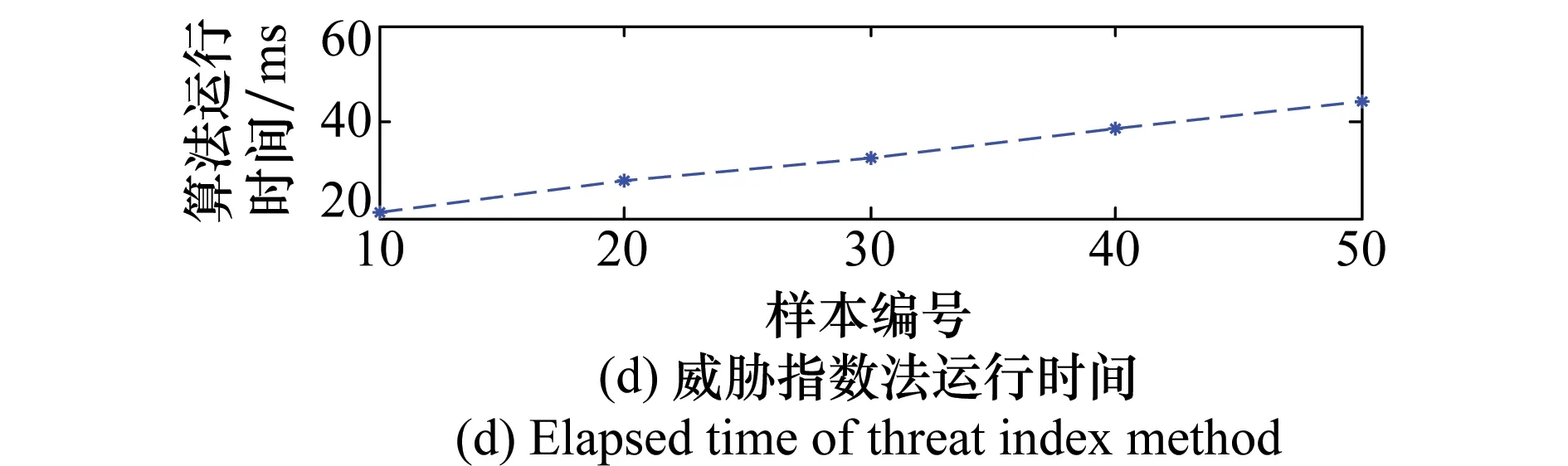
图9 各算法运行时间Fig.9 Elapsed time of the algorithms
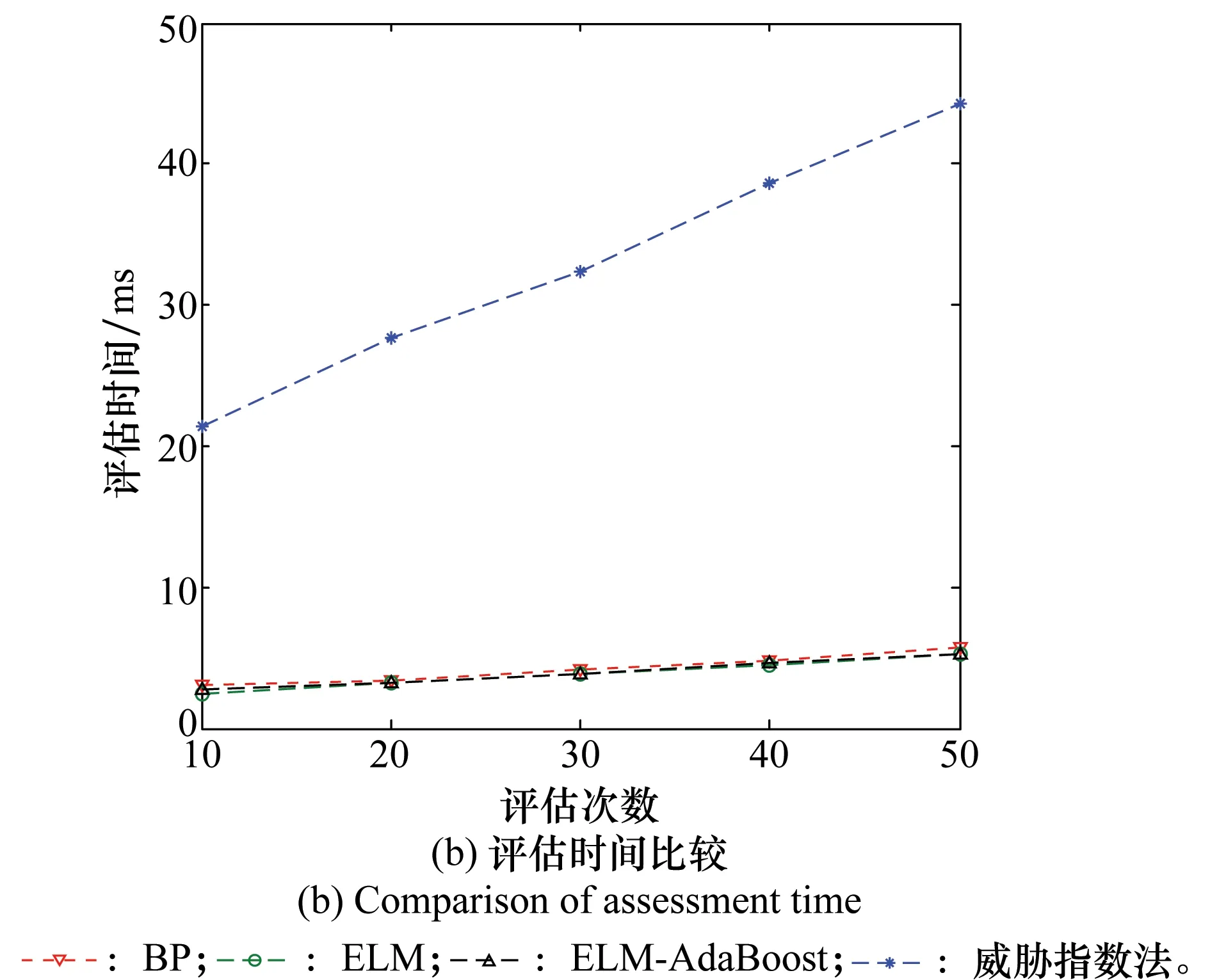
由图9可以看出,在一定评估次数下,各算法运行时间的排序为ELM弱预测器<威胁指数法 对于威胁指数法,模型不需要训练,算法的运行时间就是对样本的评估时间。但是对于3种神经网络而言,算法运行时间中除了对样本的评估时间外,还包含了模型的训练时间,而且由图9可以看出评估次数的变化对运行时间的影响很小,说明模型训练时间在运行时间中的比重很大,评估时间的比重却很小。由于本文所用神经网络算法可以经过离线训练后再使用,所以模型的训练时间长短并不影响后续评估的进行。因此,本文以评估时间为指标比较了BP神经网络、ELM弱预测器和ELM_AdaBoost强预测器进行目标威胁评估的实时性,实验结果如图10所示。 由图10(a)可以看出,随着评估次数的增加, BP神经网络、ELM弱预测器和ELM_AdaBoost强预测器的评估时间都很短且变化不大,这也说明了算法的运行时间中大部分都是模型的训练时间,而用训练好的模型进行评估的时间很短;由图10(b)可以看出,在一定评估次数下,3种神经网络算法的评估时间都明显小于威胁指数法,说明本文所用方法可以显著提高评估的效率和实时性。 图10 各算法评估时间Fig.10 Assessment time of the algorithms 针对传统空战目标威胁评估方法的不足,提出了基于ELM_AdaBoost强预测器的空战目标威胁评估新方法: (1)在ELM算法的基础上进行改进,提出了ELM_AdaBoost算法,通过ELM弱预测器的训练构造了ELM_AdaBoost强预测器,提高了模型的预测精度; (2)选取ACMI中的空战数据并利用威胁指数法构造样本数据,拓展了数据选择的范围和数量也保证了数据的质量,克服了传统数据化目标威胁评估方法样本数据过少、模型训练不充分、评估结果说服力不强的缺陷; (3)进行了目标威胁评估的精度分析和实时性分析,仿真结果表明ELM_AdaBoost强预测器的预测精度较高,且模型训练后进行评估所用的时间很短; (4) 与传统方法相比,本文提出的方法兼具了准确性和实时性的优点,可以准确、快速地进行空战目标威胁评估。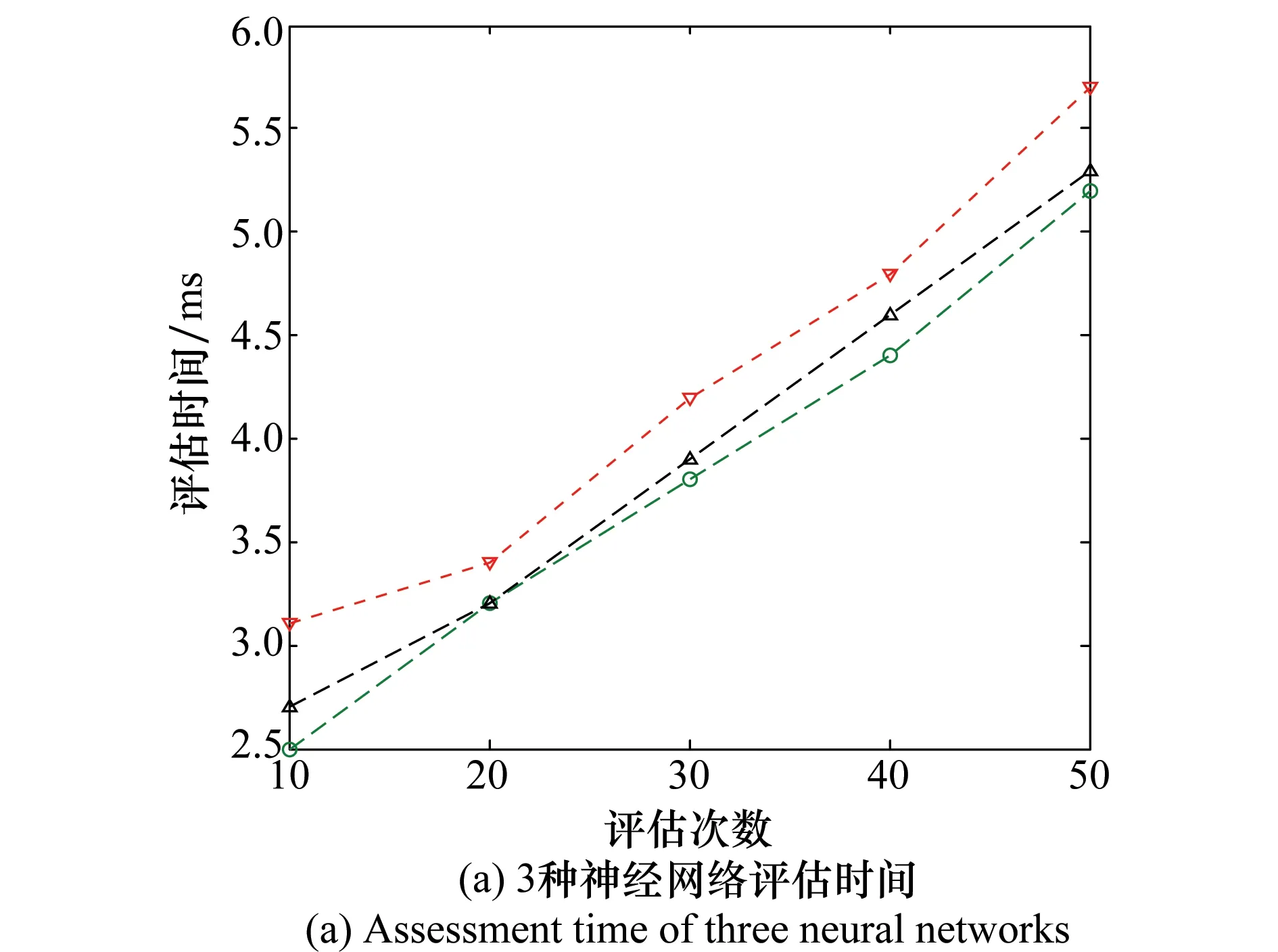
5 结 论
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
河北大学学报(自然科学版)(2022年3期)2022-06-16 01:30:10
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:40
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
辽宁工业大学学报(自然科学版)(2020年1期)2020-01-07 01:09:48
军营文化天地(2017年6期)2017-06-28 11:30:09
自动化学报(2017年7期)2017-04-18 13:41:02
百科探秘·航空航天(2015年10期)2015-11-07 07:05:14
甘肃教育(2012年24期)2012-04-29 00:44:03
西安交通大学学报(2004年7期)2004-04-29 00:44:03