
基于机载LiDAR点云的电力线自动提取
2018-07-27 05:15:58,,2,,,
计算机测量与控制 2018年7期
, ,2, ,,
(1.国网湖北省电力有限公司检修公司,武汉 448000; 2.武汉大学 电气工程学院,武汉 430079)
0 引言
电力工业关系到国计民生,是国家的重要基础性产业。我国的电力系统由发电厂,全国输电网,配电网和电力用户组成。与配电网相比,高压输电线路,即全国的输电网络,可以很容易地利用遥感手段进行测量提取。因为高压电力线位于地面较高的地方,靠近线路的植被通常被人为砍伐掉,对于电力线的提取造成了一定的困难。机载激光扫描(light detection and ranging, LiDAR)技术的出现与快速发展,为电力线测量和巡线提供了新方法,弥补了传统的航空摄影测量在林区环境下,难以识别电力线的缺点。机载激光扫描技术可以对具有有较小直径的物体(如电力线电缆)可以进行密集、快速和准确的测量[1]。自1995年以来,利用LiDAR技术已经绘制了数千公里的电力线路[2]。然而,当前的生产中仍然需要大量的人工操作,亟待全自动化的解决方案。
目前,针对LiDAR数据进行电力线提取的研究尚存在不足,生产中仍然需要大量的人工操作,亟待全自动化的解决方案。近年来,国内外大量学者对此进行了研究。例如,Axelsson(1999)[3]研究了基于霍夫变换方法寻找并行和线性二维结构,并利用二维线方程进行线性提取的方法。 Melzer和Briese(2004)[1]提出了一种通过二维霍夫变换和三维悬链曲线拟合从LiDAR数据中进行电力线提取和建模的方法。McLaughlin(2006)[4]在电力线检测上根据维度特征的不同,提出了一种监督方法对电力线进行自动分类。Kim和Sohn(2011)[5]使用RANSAC,特征提取和随机森林中的最小描述长度和主成分分析作为LiDAR数据的分类技术。Sohn等人(2012)[6]提出使用马尔可夫随机场(MRF)分类器来描绘线性和平面特征的空间上下文,用于电力线和建筑分类的图形模型中。余洁(2011)[7]采用滤波的方法自动滤除地面点,并利用二维霍夫变换分离出各条电力线。陈驰(2015)[8]则充分利用点云维数特征以及方向特征分割出电力线激光点云,然后采用二维霍夫变换和最小二乘拟合的方法提取单电力线点云。
基于以上综述,现有电力线检测方法可以归纳为两种:基于线性的检测方法(如RANSAC和2D霍夫变换[1,3,7,8]和监督分类方法[4-6]。基于线性的检测方法产生相对较高的计算成本,特别是对于大面积的数据集,必须计算每个点来确定它是否属于一条线。而对于监督分类方法,需要大量的训练数据集才能达到预期的结果,不均匀采样也将导致错误分类率的提高。同时由于林区环境中探测电力线的困难性,该方面的研究较少。针对上述问题,本文提出了一种解决森林中电力线分类问题的方法,该方法基于两种不同的技术:基于统计分析的数据预处理和基于图像处理技术的数据分类。统计分析使用一些统计标准(即高度标准,密度标准和直方图分析)来选择电力线候选点,然后剔除大量不相关的点。在获得电力线候选点之后,将这些点转换为二值化图像,并使用图像处理技术去除噪声和提取特征。最后再将二值化电力线图像转换到三维点云,从而提取出电力线点。
1 电力线提取算法
本文的算法主要有两步:①统计分析;②基于图像的处理。统计分析的目的是在密集点云中标识出电力线候选点。定义了电力线候选点选取准则(如高程、密度、直方图阈值)。候选点选取后,电力线两侧的截断边缘就清晰可见了。基于图像的处理,涉及到的是二值图像识别处理技术。在点云密度较低时,针对电力线候选点二值化处理的后的图像像素之间不具备连续性性,利用形态学变换进行图优化,并采用效率较高的渐进概率霍夫变换进行线性分割。图1详细阐述了本文方法的算法流程。
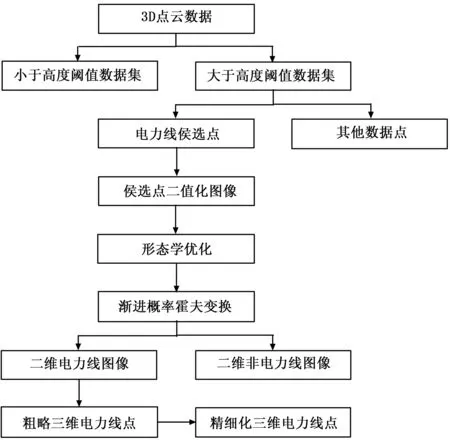
图1 电力线提取流程图
在本文中,数据处理在三个不同层次上进行:(1)整个数据集;(2)格网;(3)网格中的仓。整个数据集可以网格化为m×n个网格,每个网格可以通过使用直方图方法根据其高度在垂直平面上创建等间隔的仓。
1.1 统计分析
统计分析旨在原始机载激光雷达点云数据中标识出电力线候选点。在表1列出了有关电力线路距离地面最小距离标准,可以看出,地面以上电力线的最小高度根据电压而变化。但是,最小高度不能小于5米。考虑到电力线的可能曲率和年限(可能不完全垂直于地面),本文设置了高于地面的高度阈值(Ht=4 m),将数据分成两个数据集。通过在xy平面中对数据进行网格化,并从每个网格中提取高于地面4 m的点分到点集U中。剩下的数据分在点集I中,并从点集U中选择电力线候选点,如图(2)所示,选择标准如下:
1)高程准则:在网格中,如果高度差小于0.5 m,则网格中的所有点都作为候选点, 该高差阈值根据电力线的可能曲率设定。
2)密度分布:在每平方米的网格中,当点的数量小于2倍点密度的平方根时,将网格中所有点选为电力线候选点。
3)直方图分析:如果网格中的高差大于0.5 m,则表示该网格中存在树木点或多个对象,使用直方图来进行高度分析。例如,在高度差为10 m的网格中,可以将每个仓设置为1 m(直方图中的间隔大小)。然后,对于每个网格,如果只有一个仓包含点,则该网格中的所有点作为候选点。或者,对于每个仓,如果高度差小于0.5 m并且点数不少于点密度的平方根,则选择该仓中的所有点作为候选点。
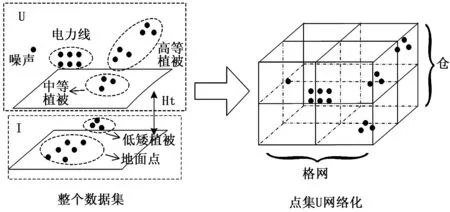
图2 数据统计分析示意图
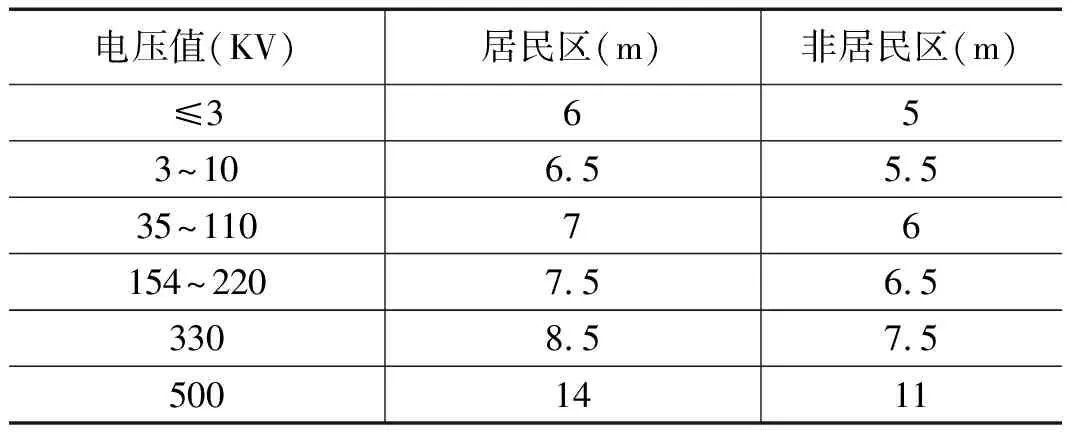
表1 电力线路与地面最小距离标准
1.2 基于图像的处理
选取电力线候选点之后,由于在这些候选点存在一些植被点。因此,需要将选取后的电力线候选点所在网格转成二值化图像,在图像中,植被点呈现出不规则的分布,而电力线则是线性分布。在现有的研究中,在图像中进行线性特征提取常采用经典的霍夫变换[9-10]。
在X-Y平面上,直线通常被定义如公式(1)所示:
y=mx+b
(1)
其中:参数是斜率,为直线在Y轴上的截距。因此,直线也可以被表示如公式(2):
b=-mx+y
(2)
对应参数空间m-b中点(m,b)。由于在二维空间中,直线具有两个自由度,可以用两个参数模型或一个具有两个以上参数和附加约束的模型来表示,因此在标准霍夫变换中,直线采用极坐标形式进行表示,如公式(3)所示:
ρ=xcosθ+ysinθ
(3)
其中,ρ是直线与(0,0)之间的距离,是向量与X轴的夹角,如图3所示。

图3 不同空间下直线表示
标准霍夫变换进行线性检测时需要在整个点集中进行,计算量较大,实时性较差。渐进概率霍夫变换(PPHT)作为标准霍夫变换的一个改进[12],在一定范围内进行霍夫变换,计算单个线段的方向及范围,从而减少计算量。
PPHT的线性检测流程如下:
1)随机获取图像上的前景点,映射到极坐标系中绘制曲线;
2)当极坐标系中交点达到最小投票数,将该点对应的X-Y坐标系中的直线L找出;
3)搜索图像上的前景点,将直线L上点连成线段并在删除该点,同时记录下该线段参数(起始点和终止点),这里的线段需要满足最小线段长度阈值。
本文PPHT算法利用开源计算机视觉库(OpenCV)进行实现[13],表2中是OpenCV中对概率霍夫变换函数的参数说明。
本文实验中,image 为进过形态学变换之后的二值化图像,Method选择CV_HOUGH_PROBABILISTIC,Rho设置为1,Theta设置为0.2,Threshold设置为50,Param1和Param2分别设置为20和110。
利用渐进概率霍夫变换进行线性检测之后,将分割出的电力线图像通过与三维候选点转换到二值图像时相同的设置(如栅格尺寸和XY坐标最大最小值)转换回三维点,并利用区域增长算法对三维电力线点云进行精细化提取。

表2 渐进概率霍夫变换函数参数说明
2 实验与结果分析
本文以Visual Studio 2013为研发平台,集成使用OpenCV图像处理库,实现本文所提出的机载激光点云数据的电力线检测算法。实验数据采用国网湖北省电力公司提供的湖北省境内采集的4块林区环境下输电线路机载LiDAR数据,实验数据详细说明如表3所示,原始点云如图4所示。
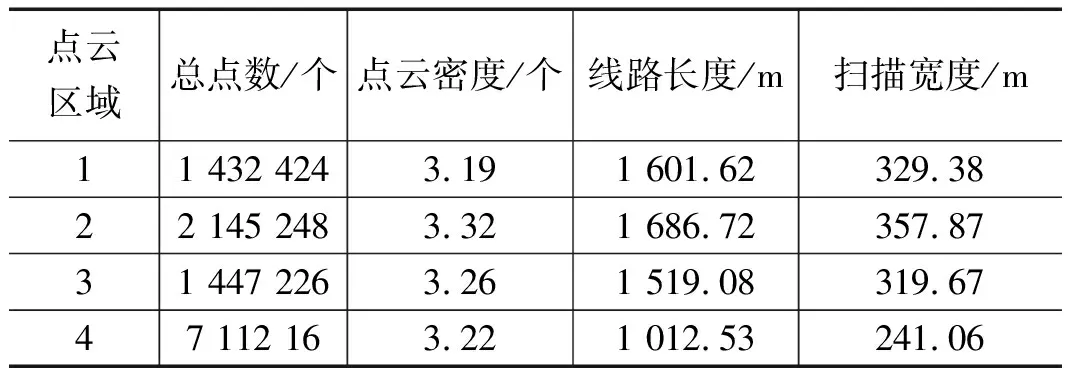
表3 实验数据详细说明
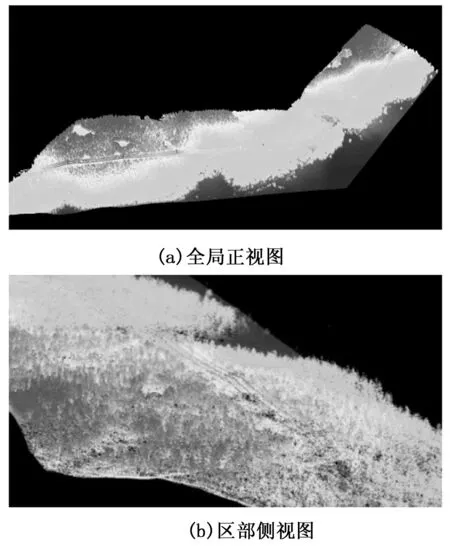
图4 区域1原始点云数据
图5的(a)到(f)详细说明了从原始机载激光雷达数据提取电力线的整个处理流程。图5(a)为采用高度阈值,从原始点云中分离出电力线候选数据集的数据,图5(b)是在图5(a)的基础上,利用设定的选取标准进行点云统计分析后得到的电力线候选点,可以观察到电力线的可见性得到显著提高。此外,由于点数显著减少,后续的处理效率会明显得到提高。图5(c)是从图5(b)转换得到的二值化图像。此时图中的电力线区域由于点密度较低,生成的像素点之间难以具备连续性,因此进行形态学优化,得到如图5(d)。采用渐进概率霍夫变换,对图5(d)进行线性分割得到如图5(e)所示二维电力线图像。通过设置从图5(b)到图5(c)相同的参数,将二维电力线图像转换为三维电力线点云。此时,我们得到了电力线种子点云,利用区域增长进一步提取电力线三维点云得到如图5(f)所示的电力线三维点云。
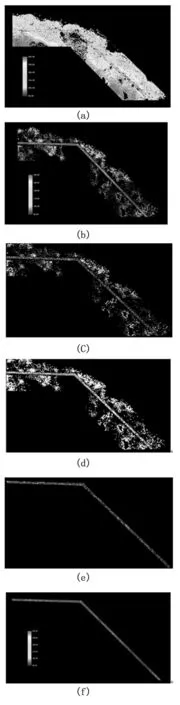
图5 区域1电力线提取流程示意图
图6中显示了,针对不同林区环境和电力线走向所采集到的其他3块试验区域的电力线提取结果,其中(2-a)(3-a)(4-a)分别表示进行高度阈值去除后的点云图,(2-b)(3-b)(4-b)表示电力线提取结果图。

图6 其他区域电力线提取结果图
为了对电力线检测结果进行分析,本文采用的参考数据使用LiDAR_Suite软件进行手工交互处理方式得到。通过分类点数(Cp)、真实点数(Tp)、错分点数(Ep)和漏分点数(Op)对实验数据分类结果进行评估,如表4所示。

表4 实验数据结果评估表
表5直观地表示出本文算法的分类结果,采用百分比来描述错分率(Er),漏分率(Or)以及正确率(Cr),其计算公式如(4)所示:
Er=Ep/Cp
Or=Op/Tp
Cr=Tp/Cp
(4)
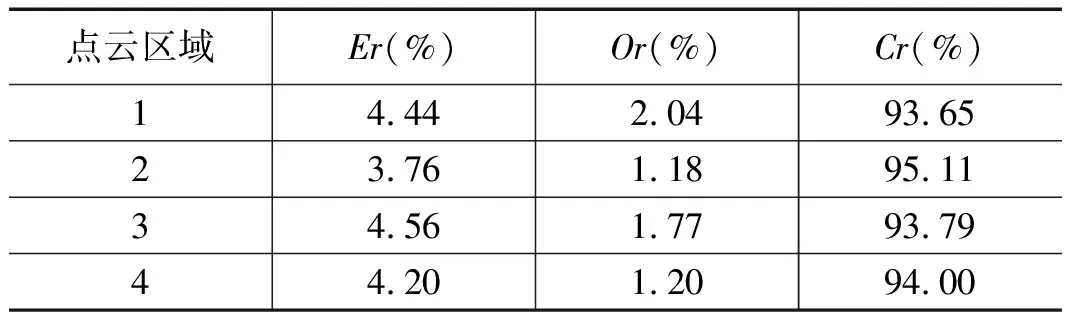
表5 实验数据结果评估表(百分比)
上表的评估结果显示不同实验区域的正确率在93.65%到95.11%之间,达到了94.14%的平均正确率,其分类精度与点云密度和林区植被的密集程度等因素相关。从图7中可以发现,错分来源主要是一些接触或非常靠近电力线的物体,如电力线杆塔。在这种情况下,部分噪声点不能完整地去除。漏分误差主要源于候选点选择过程中。当使用密度准则和直方图分析时,一些阈值会影响候选点选择过程。

图7 电力线错分及漏分示意图
3 结语
本文结合点云统计分析与基于图像的处理技术,提出了一种针对植被环境中电力线的自动化、高效率的电力线检测方法。实验结果表明,该方法能够完整地提取出电力线对象,分类精度较高,分类结果不受电力线走向的影响,对于非林区和城市开阔区域同样具有较高的适用性,对于电力线巡检具有一定的利用价值。随着我国电力线路的不断完善和其他遥感技术的创新和广泛应用,如何基于多源遥感数据进行电力线、杆塔等地物的高精度高效率的提取将是本文的后续研究重心。
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
中外文摘(2022年8期)2022-05-17 09:13:36
中老年保健(2021年4期)2021-08-22 07:10:04
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
电子制作(2017年14期)2017-12-18 07:07:59
电信科学(2016年11期)2016-11-23 05:07:50
计算机工程(2015年8期)2015-07-03 12:20:21
电测与仪表(2015年8期)2015-04-09 11:50:28
电测与仪表(2014年13期)2014-04-04 12:04:08
