
一种全天候多谱探测预警技术的研究
2018-07-26 09:39
武汉船舶职业技术学院学报 2018年2期
(1.武汉船舶职业技术学院,湖北武汉 430050;2.海军工程大学电气与信息工程学院,湖北武汉 430033)
在港口、码头等重要监控区域,船舶航行及停泊时的安全问题日益突出。水面运动目标的有效视频探测依赖于各种摄像机,可见光、微光、红外等探测技术均有其局限性。多谱探测是将各种探测手段进行有效的融合,充分发挥各种方式自身的优势,最终形成全天候目标探测系统。全天候多谱探测系统需要能够实时对接近目标进行预警和跟踪,预警监控要求为:
(1)能够有效地监视船舶所在邻近海面和低空,实时掌控范围内的目标活动态势,并对运动目标进行识别。
(2)能够在监控场景中设置各种警戒事件规则,发出报警的同时自动记录并显示报警的时间地点数据。
(3)实施报警时的监控图片抓拍,并对监控场景中的运动目标进行实时跟踪,并绘制运动轨迹。
(4)支持系统自动选定目标进行跟踪、人工指定目标进行跟踪、手动跟踪三种模式;收到报警信息后联动短信发送功能,使值班人员能够及时获取安全警报信息,以进行快速的响应。
1 系统总体设计
预警跟踪系统根据实际预警范围的需要,对以船舶全景及船桥为中心的警戒范围进行了定义:①有效警戒范围(可见光区设备),半径为5Km范围海域;②有效警戒范围(微光夜视设备)半径为3Km范围海域;③有效警戒范围(红外设备)半径为2Km范围海域。
预警系统在船舶上布防的范围如图1,摄像机通过适当布置可以形成一个环形的布防区域。如图1,通过8台不同角度的摄像机就能够实现对船舶周边的环形区域进行覆盖。
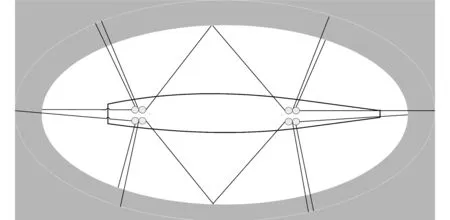
图1 船舶防控区域
2 系统硬件设计
2.1 摄像机
摄像机的选择和配置可根据具体环境采用可见光摄像机、红外摄像机、微光摄像机进行综合配置。
2.2 预警一体机
预警一体机的外部接口包括:(1)五路模拟视频输入,可同时对四路视频进行处理,另一路接跟踪摄像机图像;(2)一路跟踪云台控制串口;(3)两路报警设备USB口;(4)8路网络接口,用于系统扩展以及网络视频图像的接入,见图2。
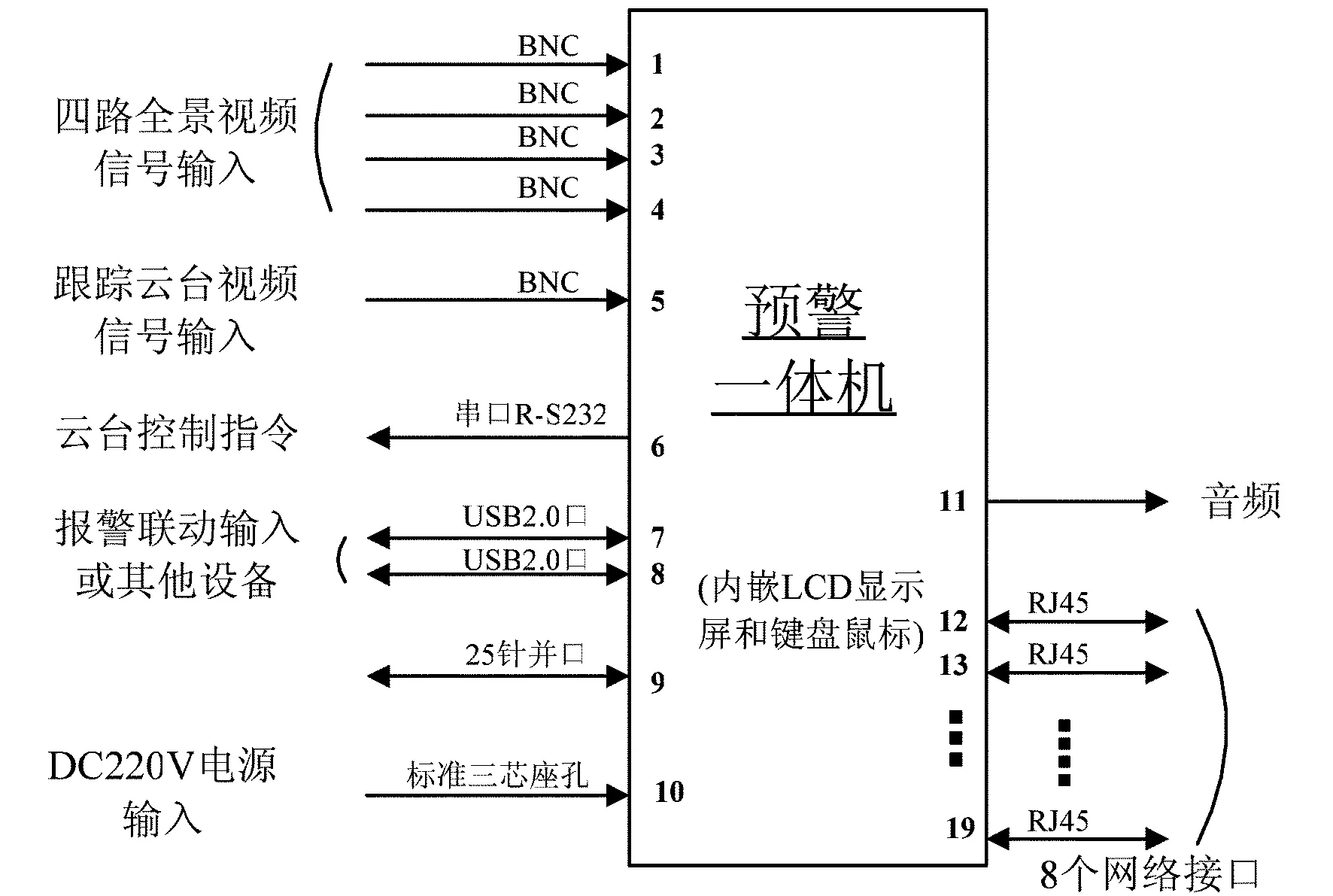
图2 预警一体机设计
其中,云台控制串口用于将控制指令发送至跟踪摄像机云台,当目标检测算法检测到运动目标时,将会依据目标的坐标对跟踪摄像机进行控制,使得跟踪摄像机始终对准运动的目标,并拉近画面来显示目标的细节。两路报警设备USB接口可以用来接入警灯等报警设备,将预警信息发布出来。网络接口用于支持网络视频图像的接入,使得预警系统能够对图像接入更加灵活。
预警一体机的硬件结构如图3,内部包括图像编解码卡和交换机,主要支持图像的输入输出。图像采集卡用于支持模拟图像的输入,视频服务器(DVS)用于支持网络图像的输入,将全景摄像机的图像采集到内存之后,使用前述的目标检测算法进行目标检测。
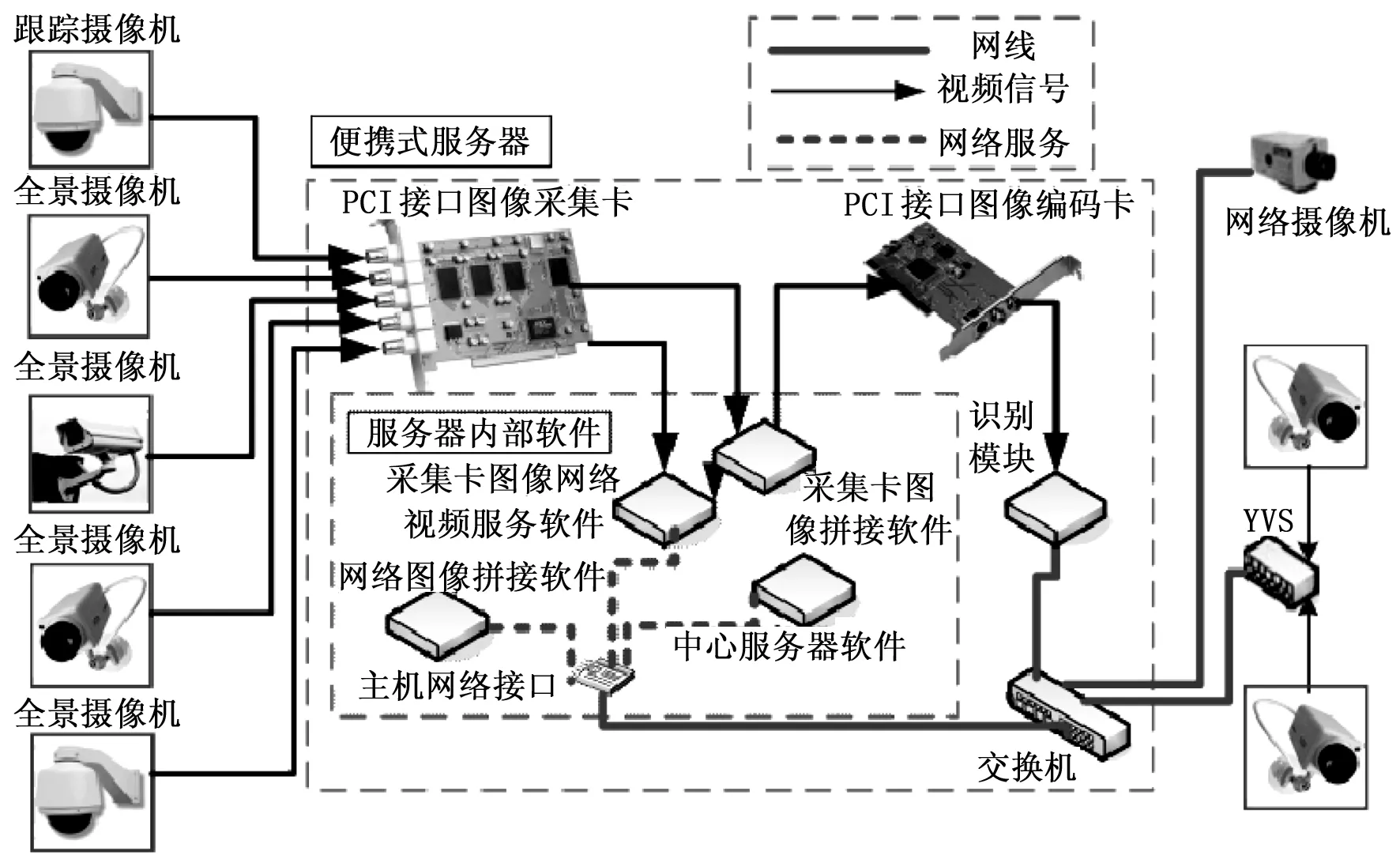
图3 预警一体机硬件结构
3 系统软件设计
依据信息流向进行设计,首先用前端探测器获取视频信息,用目标检测算法处理图像并输出目标信息和预警信息,再结合目标的特征信息[1]依据处置方案进行处理。
传统监控系统主要采用摄像机加硬盘录像机的结构,需要值班人员目视查看,本系统设计时兼容了传统监视系统,可直接将原有的视频图像接入系统,进而使用目标检测跟踪算法[2]。通过对目标运动的检测,结合预先设定的警戒规则,得出目标活动信息和预警信息。然后将预警信息和目标活动信息传递给报警联动部分,根据预先设定的联动处置预案方法来进行相应的处置,并发出控制信息,使跟踪摄像机随动跟踪目标。系统信息流程如图4所示。
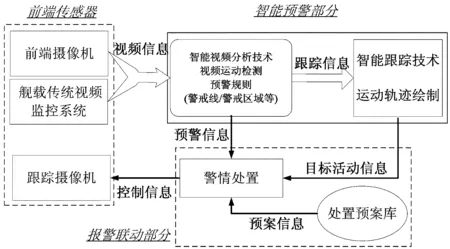
图4 预警一体机信息流程
系统软件结构如图5,视频信号经图像编解码单元后,由拼接模块将多路图像拼成四画面显示,同时图像进入智能分析单元。此模块包含了图像去噪算法[3]的实现和目标检测算法的实现,之后进入中心管理服务模块。管理模块将目标信息进行分发,报警服务组件就能够启动报警联动装置,目标服务组件也将进行目标跟踪的控制以及为实时轨迹的显示提供目标信息。
对于图5当中的目标服务组件以及目标跟踪模块,图6给出了其更详细的逻辑结构。在设计过程中,将目标获取部分、坐标变换部分和实际的云台控制驱动部分的设计进行分块,实现不同的功能模块,以利于逻辑结构的清晰。
对于图5当中的轨迹显示,根据监控图像根据目标检测算法所提供的目标坐标在电子地图画面窗口进行实时绘制,俯视图根据投影变换[4]实现。
4 系统实现设计
船舶周边环形带的有效范围可以通过探测器焦距、架设高度和角度计算出来。以成像之后目标在图像中占由100像素点为例,根据摄像机的焦距、需要探测的距离,可以换算出所能捕获的目标最小尺寸。小目标则占有像素在10个以内,也可以物体尺寸换算出系统所能够预警的距离,见表1。
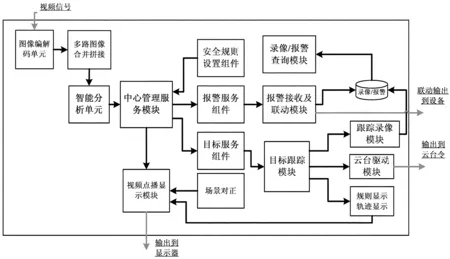
图5 预警一体机软件结构
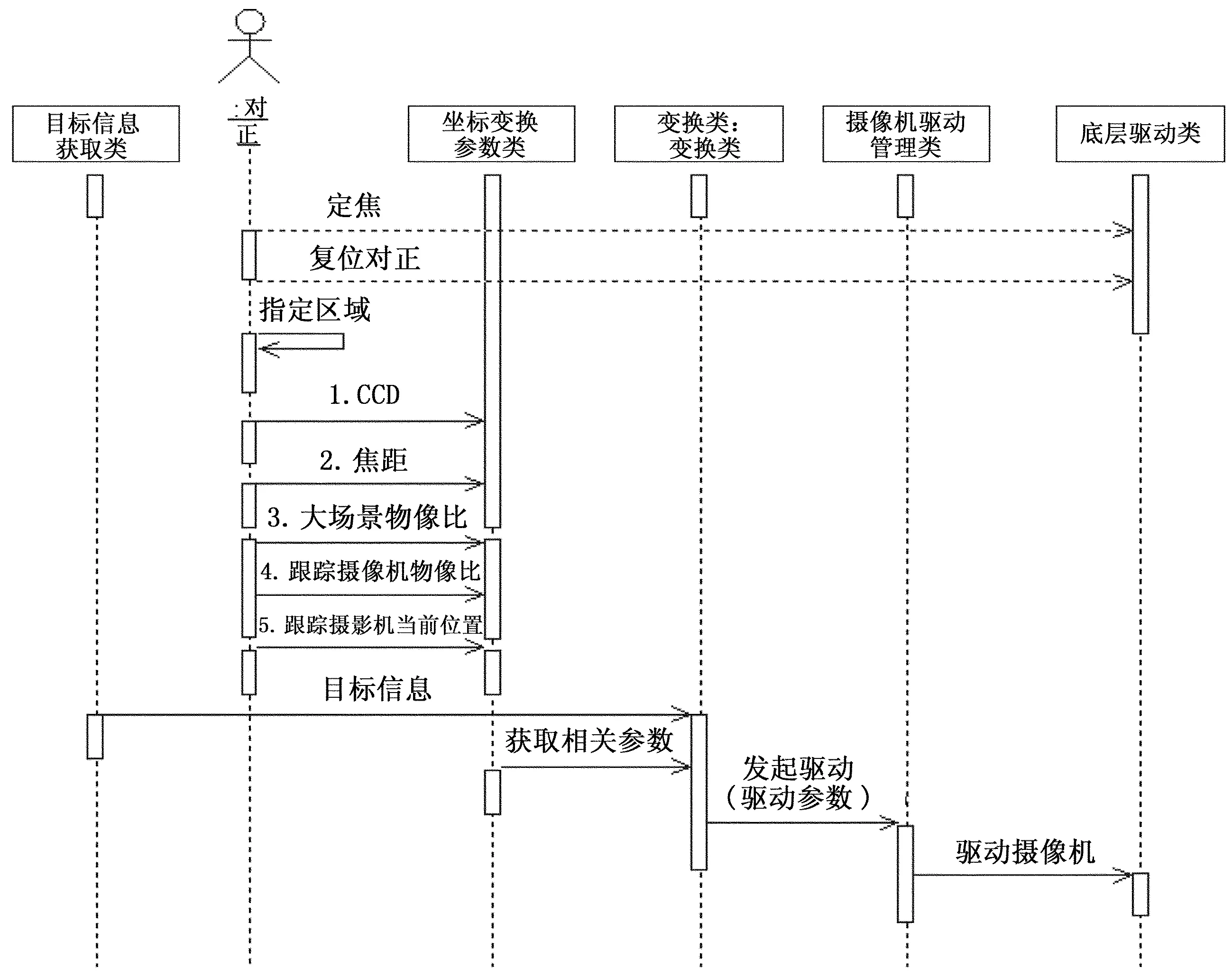
图6 跟踪模块结构设计
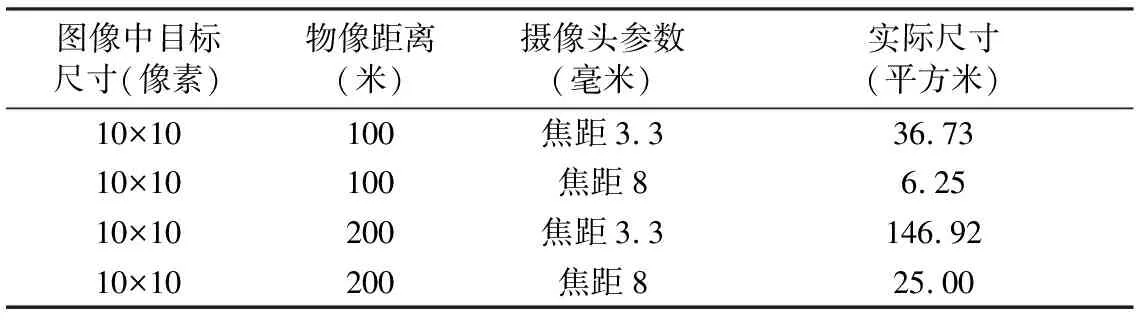
图像中目标尺寸(像素)物像距离(米)摄像头参数(毫米)实际尺寸(平方米)10×10100焦距3.336.7310×10100焦距86.2510×10200焦距3.3146.9210×10200焦距825.00
依据布防的规模可以进行探测器类型的选择和安装密度的控制。在实验样机测试中,可采用船舶单侧的布防,此方法可实现对系统的性能测试。
在完成摄像机设置后,可以使用目标检测算法进行实验。主要预警对象的设计如下:
(1)防范快艇靠近
对快速接近船舶进行监控首先要对其测速,可以用双线的方式来对船只进行测速,划定二条警戒线,在规定时间内穿越则报警,并启动联动跟踪。
(2)防范渔船靠近
速度慢的渔船在穿越双警戒线的时候就不会产生报警,则在以镜头为圆心,300米为半径的扇形警戒区域,只要有船只进入该区域就报警并进行跟踪。
(3)码头行人
码头行人采用逗留规则,在码头入口处划定警戒区域,人员在这一区域内逗留超过一定时间就报警,并通知值班人员前往查看。
(4)游泳人员
防止游泳人员攀爬上船,需在舰舷周围设立警戒区域,有人出现即报警。
5 结 语
全天侯多谱探测预警系统中包含的系统信号处理流程、视频信号处理方法及系统中环形带有效范围内设备参数,本设计方案能在各种复杂环境下对进入场景中的目标进行预警跟踪,并满足实时性需要。
猜你喜欢
小哥白尼(军事科学)(2018年9期)2018-12-08
小哥白尼(军事科学)(2018年8期)2018-09-12
小哥白尼(军事科学)(2018年6期)2018-09-10
铁道通信信号(2018年5期)2018-06-28
小哥白尼(军事科学)(2018年1期)2018-05-25
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
汽车维护与修理(2016年10期)2016-07-10
小学生·多元智能大王(2015年3期)2015-05-25
新闻前哨(2015年2期)2015-03-11
