新型自走式花生收获机的设计
2018-07-26 02:05陈海需衡耀付
农业科技与装备 2018年3期
陈海需,衡耀付
(黄淮学院 机械与能源工程学院,河南 驻马店 463000)
目前,市面上的花生收获机大致有三类:牵引式、背负式和自走式。这些机械都有自身的局限性:联合花生收获机只能收获花生湿果,而湿果需要大面积场地晾晒后才能保存,否则果实很快霉变腐烂,且后期储存防霉工作繁重;背负式花生收获机利用农家拖拉机作为动力,整体设备质量大,零件多,安装麻烦。牵引式花生收获机械过长,转弯困难,工作安全性差。
结合豫南地区花生收获的特点,借鉴各种花生收获机的设计经验,设计一种自走分段式花生收获机。通过对机械结构设计和优化,提高花生秧果的捡拾率,提升机械性能和安全性。
1 自走式花生收获机设计方案
新型自走式花生收获机主要包括驾驶室、机架、动力传动机构、自动捡拾机构、传送装置、摘果装置、振动筛、吹风机、垂直提升集果装置和残秧收集箱,如图1所示。
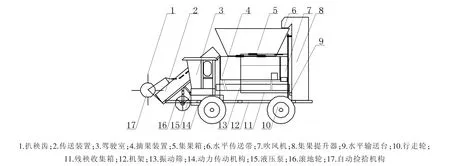
图1 花生收获机结构示意图Figure 1 Structural diagram of peanut harvester
驾驶室设在机架前部;动力传动机构在驾驶室正下方,自动捡拾机构在驾驶室右前方,并与传送装置刚性连接。摘果装置安装在机架中部,与传送装置安装方向一致,且入口与传送装置出口相衔接;振动筛在摘果装置正下方;出风机安装在摘果装置尾部的振动筛上方;垂直提升集果位于安装在机架后方,与振动筛出口相衔接;残秧收集箱与摘果装置排秧口相连。
工作时,花生秧果通过自动捡拾机构进入传送装置,并由其顶端落入摘果装置;花生碎秧通过排秧口进入残秧收集箱,而花生果则落入振动筛中进行清选分离,利用振动筛后部的吹风机二次分离杂物;随后,花生果慢慢通过振动筛出口进入垂直提升输送装置,由其上端出料口传送至集果箱,完成收获工作。
2 自走式花生收获机主要部件设计
2.1 自适应捡拾输送装置
捡拾输送装置是花生收获机的工作入口,主要包括支架、扒秧机构、输送带、滚地轮机构和动力传动机构五部分,如图2所示。
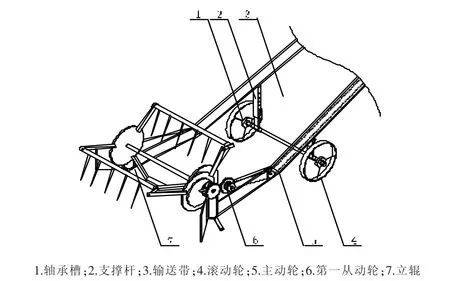
图2 捡拾输送装置结构示意图Figure 2 Structural diagram of collecting conveyor
扒秧机构装置安装在支架前端、输送带入口处;输送带位于支架中间部分;滚地轮机构安装在输送带前半部分,通过支撑杆与支架连接在一起,并用螺旋副固定;支架一端铰接在下级设备入口处,另一端安装扒秧机构;传动机构设置在传送设备的右侧板下端,将机械动力系统的动力传递至扒秧机构。
工作时,动力系统将动力传递至主动轮,主动轮带动第一从动轮旋转,第一从动轮通过齿轮传动带动旁边的第二从动轮转动;第二从动轮与扒秧轴同轴,实现扒秧机构转动扒秧;纵向防缠绕立辊通过驱动轴上的锥齿轮传动,在传送设备入口侧板处给花生秧果以推进力,使传送过程流畅、无遗漏。
滚地轮机构安装在传送带前端下方,宽6 cm;支撑杆上部与支架相连,下侧固定在地轮内侧轴上,为空心方钢结构,可以伸缩;支撑杆下部分嵌套于上部,嵌套部分均布一列圆孔;支撑杆上下圆孔对齐后用铆钉固定,通过调整铆钉位置调节扒秧机构离地间距。
假设机组前进速度为50 m/min,根据设计尺寸及田间试验,取扒秧轴速度为57 m/min,扒秧轴转速为28.4 r/min,花生秧果输送速度与扒秧速度相同。滚地轮不需要动力传动,工作时根据地表松软程度、干湿情况调节高度。依靠捡拾输送装置的自重和机械前进推力,确保扒秧机构有固定的离地间距。花生秧果通过扒秧机构进入传送带,并由传送带提升送至下级机构。机械行走但不作业时,通过液压泵升起整个捡拾输送装置,增加工作安全性。
2.2 垂直提升输送装置
目前,花生果摘果机、收获机的输送提升装置大多是倾斜输送带,用绞龙提升输送,不便于花生果的收集,还易出现花生破果、烂粒等问题,造成摘果机收获质量差。为此,设计一种结构简单、使用方便的花生果垂直提升输送装置。
花生果垂直提升输送装置包括一个垂直提升装置和一个水平输送台,如图3所示。
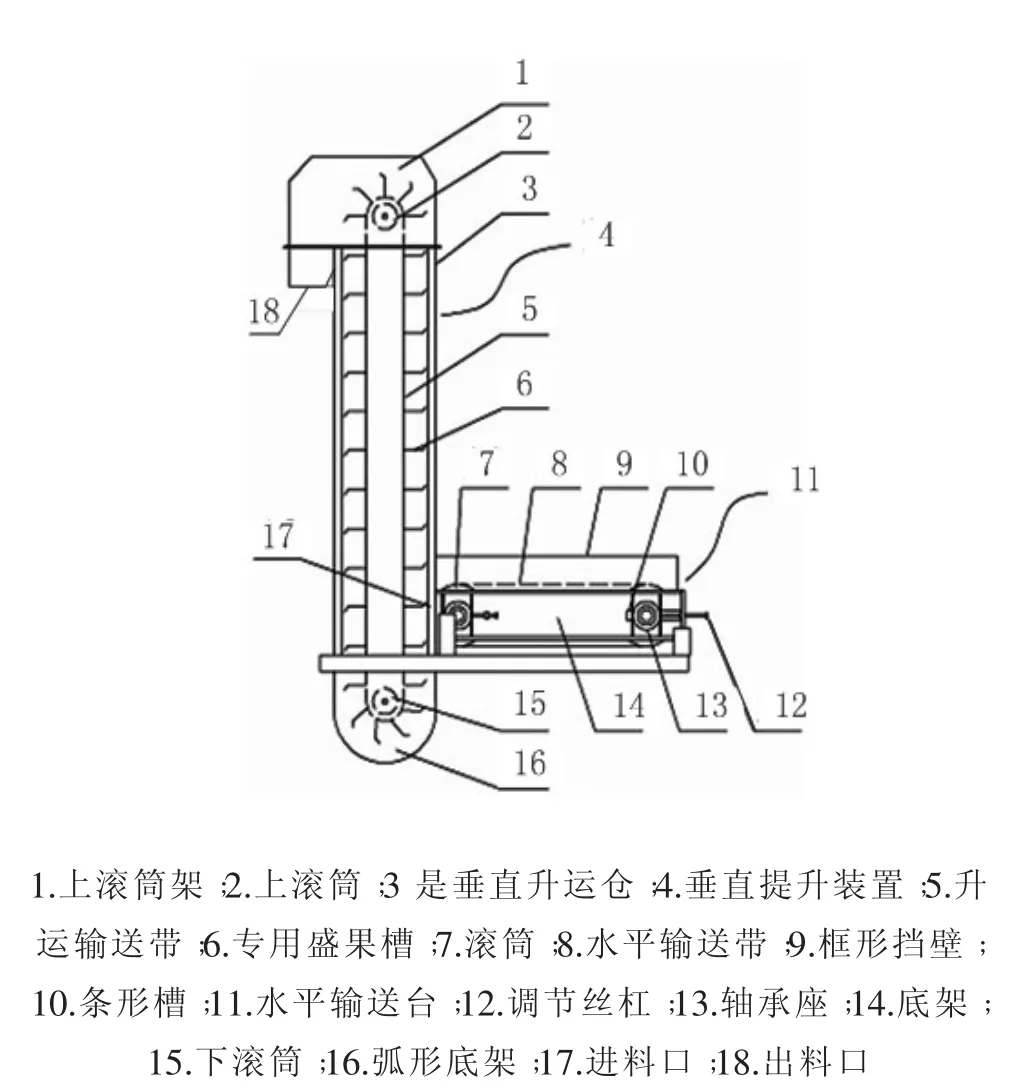
图3 垂直提升输送装置结构示意图Figure 3 Structural diagram of vertical lifting conveyor
垂直提升装置设在水平输送台的端部,依靠垂直升运仓进行集果输送。垂直升运仓内设有上滚筒、下滚筒及连接在上、下滚筒上的升运输送带。升运输送带上均匀安置专用盛果槽。靠近水平输送台端部设有进料口,顶部侧边设有出料口。专用盛果槽包括平行收集部和连接在其外侧的倾斜收集部。垂直升运仓的顶部设有上滚筒架,下部设有弧形底架,下滚筒连接在弧形底架上,前后面设有开口。
水平输送台有前后2个平行的底架,平行底架之间连接2个滚筒,滚筒之间连接水平输送带,水平输送带上设有框形挡壁。底架上均设条形槽,条形槽内滑动连接轴承座。轴承座的一侧有调节丝杠,可以调节轴承座的位置,使水平输送带运行平稳。
工作时,摘果机摘落的花生果经振动筛的出料口进入水平输送台,水平输送台把花生果送至垂直提升装置的进料口,经垂直提升装置升运至一定高度后抛出,并经出料口进入花生果集果箱。升运花生的效率为800~1 000 kg/h,且能有效避免花生破果、烂粒等问题。
2.3 其他部件
摘果装置位于扒秧输送装置后端,摘果对象是半干的花生秧果。其摘果搅龙是安装在与搅龙轴等半径螺旋线上的90°螺旋搅杆,可对干湿程度不同的花生进行摘果,速度为580 r/min。搅龙出口直接与残秧收集箱相连。
清选分离装置装在搅龙装置的正下方,由振动筛、吹风机、残秧收集箱等组成。吹风机安装在振动筛出口位置正上方,速度为850 r/min,吹风朝向残秧收集箱。残秧收集箱上留有进风口。
3 结论
自动捡拾机构离地间距直接关系花生秧果的捡拾效果。以往,驾驶员采用肉眼观察自动捡拾机构与地面的间距,容易造成漏检或机具触地。调节滚地轮可以根据地表松软程度、干湿情况自由调节滚地轮高度,实现捡拾机构离地间距的恒定控制,避免不同地表对机械造成的影响,有效提高工作安全度和工作效率。
垂直输送集果装置极大地缩短了机械的整体长度,作业安全性大大提高。同时,集果箱安装在摘果装置上面,充分利用空间,为拖拉机运输花生秧果提供方便。该机结构简单、合理,生产和安装成本低,适于在花生种植区大面积推广应用。
猜你喜欢
科海故事博览·下旬刊(2022年4期)2022-05-07
橡塑技术与装备(2022年3期)2022-03-17
机械研究与应用(2022年1期)2022-03-14
起重运输机械(2022年2期)2022-03-04
河北科技师范学院学报(2021年1期)2021-05-10
世界有色金属(2020年13期)2020-12-08
科学技术创新(2020年17期)2020-06-30
小天使·二年级语数英综合(2015年5期)2015-05-15
中国新技术新产品(2013年7期)2013-08-15
中国新技术新产品(2012年7期)2012-11-16