混合直流输电改善动态特性的功率附加控制
2018-07-25 07:31:26周佳宾
山东电力技术 2018年6期
孙 凌,程 剑,宗 超,周佳宾,杨 瑞
(1.山东送变电工程有限公司,山东 济南 250118;2.国网山东省电力公司,山东 济南 250001;3.国网山东省电力公司滨州供电公司,山东 滨州 256600;4.国网山东省电力公司建设公司,山东 济南 250001)
0 引言
随着高压直流输电(HVDC)技术的广泛发展,对建立更加安全的电力系统的需求日趋迫切[1]。传统高压直流输电系统具有成本低,技术成熟,易与可再生能源相结合等优点和换流站需要吸收大量无功以及存在换相失败问题的缺点[2]。为获得更好的经济和技术效益,文献[3]提出了基于电压源型换流器和脉宽调制技术的新型高压直流输电与传统HVDC的新型混合直流输电方式相结合,可充分利用两者各自的优点,有效地扩展常规直流输电系统的功能和适用范围。混合直流输电系统优点为[4-5]:输送功率范围大,安装调试方便;受端VSC对交流系统要求低,可工作在无源逆变方式;VSC不仅不需要交流系统提供无功功率,同时可以对交流母线的无功功率起到动态补偿以稳定交流电压以及易于拓展等优点。但混合直流输电不能实现潮流反转。
针对混合直流输电系统,利用混合直流输电系统特点,理论分析并设计了相应的功率控制器。通过PSCAD/EMTDC对所设计的控制器进行仿真验证,初步仿真结果证明了在不同的故障条件下,该控制器有效地改善了混合直流输电的动态性能,提高了系统遭受大扰动时的稳定性。
1 Hybrid-HVDC系统与控制
混合直流输电系统通常是由3部分组成:送端换流站采用由晶闸管构成、基于自然换相的传统电流源型换流器(Current Source Converter,CSC),受端换流站采用由绝缘双极晶体管(Insulted Gate Bipolar Transistor,IGBT)以及正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)技术构成的电压源型换流器(Voltage Source Converter,VSC)和 HVDC 传输线路组成,文献[6]对混合直流输电系统的结构组成、技术、运行特性进行了全面探讨。图1中,每端交流系统和换流器之间由一个等效电抗连接。

图1 混合直流输电结构图
图1中,us1、us2分别为送端电网和受端电网电压基波分量有效值:ud1、ud2分别为整流侧和逆变侧换流站正、负极直流母线间的电压。
图2为逆变侧VSC换流站传统d-q矢量控制系统结构图[7],图3为Hbrid-HVDC逆变侧VSC换流端等效模型。

图2 VSC换流站传统d-q矢量控制系统结构图
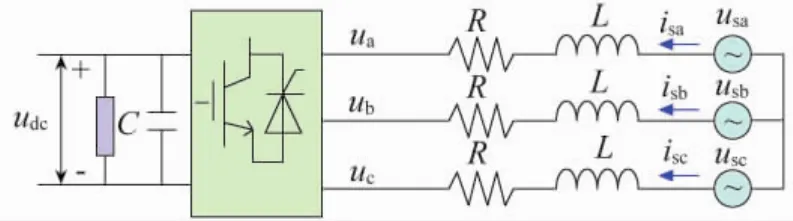
图3 VSC换流端等效模型
由图3可知:

式中:usa、usb、usc分别为系统三相电压;ua、ub、uc分别为换流站出口端三相电压;isa、isb、isc为交流系统和换流站之间的电流。
对式(1)进行坐标变换,可得到VSC在d、q旋转坐标系下的模型描述:

式中:usd、usq、ud、uq分别为电网电压矢量和换流站交流输出电压d、q轴分量;id、iq分别为换流站交流电流矢量的d、q轴分量;w为交流系统的基波角频率。
将式(2)写成矩阵矢量的形式为

在稳态情况下,式(3)可转化为(4),

根据瞬时无功功率理论,在d-q同步旋转坐标系下换流站与交流系统的有功功率Pac和无功功率Qac为

当d轴以电网电压向量定位时,即usq=0,则式(5)、(6)可写为

从交流系统到逆变侧VSC换流站电流为

式中:XL=j wL为VSC换流站与PCC间的换流变压器和电抗器的等效电抗。
直接电流控制是目前大功率换流器,包括混合直流输电系统广泛采用的控制方式。此控制方式主要由内环电流控制器和外环电压控制器两部分组成。
对于外环有功功率、无功功率控制,由式(7)知,可以通过调节id和iq分别控制换流站和交流系统交换的有功功率和无功功率,从而实现有功功率和无功功率的独立调节[8,9]。 同时为了消除稳态误差,有功功率与无功功率指令值的偏差经PI调节后,转换为有功电流的参考量和无功电流的参考量。
为了进一步提高系统的动态特性[10-11],本文在混合直流逆变侧传统d-q矢量控制器的基础上增加了一个功率调节控制器,以补偿系统扰动后功率振荡。有功功率参考值可表示为

若忽略换流电抗器损耗和谐波分量,两端交流电网之间传输的有功功率可表示为

式中:E1和E2分别为两端换流器交流侧的交流电大小;δ为E1和E2之间的相角差;X12为混合输电系统两端换流器之间的电抗。

式中:P0、δ10、δ10是系统初始变量。

为了抑制系统功率振荡,则有功功率补偿参考值为:

式中:ω1、ω2分别为CSC整流站、VSC逆变站交流侧系统角频率;K′为所设计的功率调节控制器。
2 系统仿真
利用仿真软件PSCAD/EMTDC建立了基本结构如图1的西藏电网混合直流系统的仿真模型,其整流侧交流系统为青海简化电网、逆变侧交流系统为西藏详细电网。基本控制方式为整流侧定直流电压,逆变侧定交流电压-有功功率的传统d-q矢量控制,直流电压为,系统功率10MW。分别考察逆变侧靠近交流母线处发生故障且故障持续时间不同情况下,系统的动态性能。
2.1 控制器设计
为了提高系统动态特性,根据式(13)设计并在逆变侧加入一个功率控制器。将两端换流交流侧系统角频率差作为控制器输入信号,控制器输出加在原逆变侧外环有功功率参考信号以补偿系统受到扰动后的功率波动。功率控制器如图4所示。

图4 逆变侧功率附加控制器框图
图4中,w1,w2分别为系统送受端角频率;经过测量环节、信号过滤环节、PI控制环节和一个限幅环节。其中测量环节用一个一阶惯性环节来模拟[12];Pref1与式(9)中定义的P′ref相同。
2.2 仿真结果及分析
假设系统稳态运行5 s时逆变侧近端交流母线发生三相短路接地故障,持续0.1 s后故障切除。图5给出了逆变侧分别采用传统d-q矢量控制器和加入所设计的有功功率调节控制器的情况下系统直流电压、系统传输的有功功率和控制器功率补偿的波形变化。
假设系统稳态运行5 s时逆变侧近端交流母线发生三相短路接地故障,持续0.2 s后故障切除。图6给出了逆变侧分别采用传统d-q矢量控制器和加入所设计的有功功率调节控制器的情况下系统直流电压、整流侧有功功率、功率补偿的变化波形。


图5 逆变侧故障时间0.1 s仿真结果

图6 逆变侧故障时间0.2 s仿真结果
由仿真结果可见,当混合输电系统逆变侧交流母线发生不同故障时间的三相短路故障,故障恢复期间,系统逆变侧定交流电压-定有功功率在传统d-q矢量控制方式下,直流电压以及系统传输功率的振荡幅度较大,波动时间较长。相比较在VSC逆变站加入功率调节附加控制器后,直流电压和系统有功功率在摇摆周期中的摇摆幅度相对减小,最终稳定在额定水平,系统有功功率和直流电压均以较快的速度恢复。所以,设计的功率调节附加控制器较传统d-q矢量控制更好地改善了混合输电系统的动态稳定性。
3 结论
根据混合直流输电系统特点提出了一种提高系统动态稳定性的方法。推导了功率调节控制器模型,PSCAD/EMTDC在系统不同故障仿真结果验证了其能够有效地提高系统稳定性和安全性。同时,由于所提出的功率调节控制器限幅的取值较小,故控制器的有功功率补偿值较混合输电系统中的传输功率值相对较小,其应用到实际工程中时所占的投资比重很小,具有较高的经济性。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
电子制作(2019年11期)2019-07-04 00:34:54
通信电源技术(2018年3期)2018-06-26 08:06:20
现代防御技术(2016年1期)2016-06-01 12:13:28
湖北电力(2016年8期)2016-05-09 09:03:08
湖北电力(2016年8期)2016-05-09 09:03:06
通信电源技术(2016年5期)2016-03-22 01:10:10
新高考·高一物理(2016年1期)2016-03-05 22:47:39
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
机电信息(2015年6期)2015-02-27 15:55:01