巡检机器人在超特高压变电站的应用
2018-07-25 07:31:38牛志华
山东电力技术 2018年6期
牛志华,石 炎
(1.郑州路桥建设投资集团有限公司,河南 郑州 450000;2.河南工业大学,河南 郑州 450001)
0 引言
作为电力系统供电与传输的枢纽,变电站的安全运行将直接影响国民生产与生活[1-2]。在电力系统运行过程中,很容易发生各种故障如损伤、发热、漏油和异物等,而目前变电站中绝大多还是采用人工排查、检测的方式进行巡检,效率低、劳动强度大、检测结果不准确等缺点给工作人员带来很多不便[3]。
随着技术的发展,利用机器人技术进行巡检的需求日益强烈。通过介绍巡检机器人的整体结构、硬件组成、软件功能及应用情况,表明在变电站中将机器人技术和巡检技术相结合,可以显著提升现有的工作效率,增强工作体验,使变电站的维护、管理变得更加合理、规范,为变电站的运行提供更可靠的保证。
1 巡检机器人组成原理
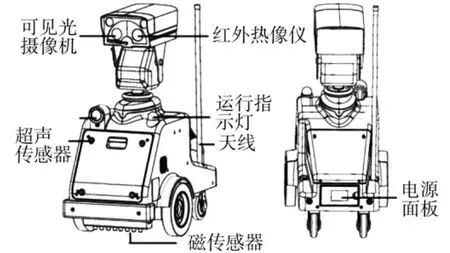
图1 变电站巡检机器人结构
超特高压变电站巡检机器人利用导航定位技术,结合可见光摄像机、红外热像仪、超声传感器、磁传感器等先进传感器实现最优路径规划、自动充电、采集设备图像等功能[4],通过无线传输技术将所有信息与数据发送到控制中心,利用图像处理和模式识别等技术实现对设备热缺陷、短路状态、温度检测等情况的判别;对仪表读数、油位计位置的识别。变电站巡检机器人整体结构如图1所示。
1.1 巡检机器人硬件组成
超特高压变电站巡检机器人系统主要分为主控模块、电源管理模块、运动控制模块以及云台检测模块。其硬件组成如图2所示。
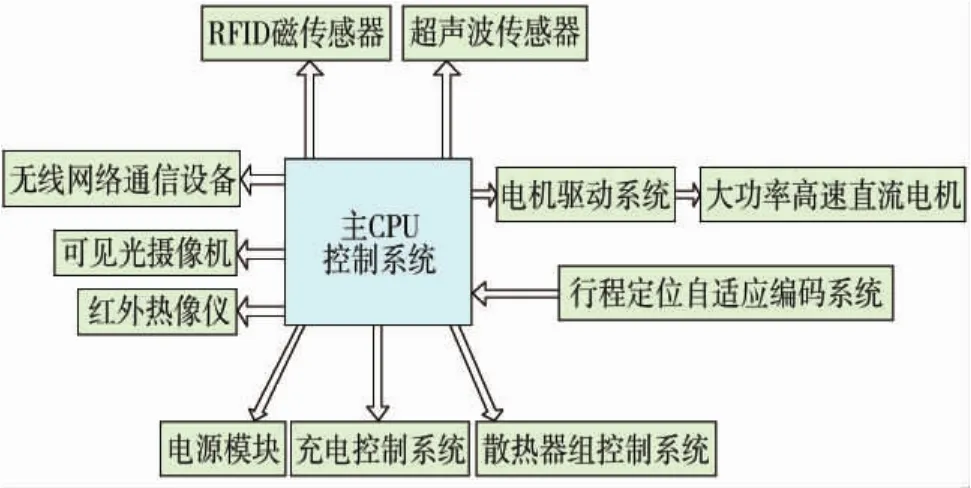
图2 变电站巡检机器人硬件组成
主控模块由主CPU控制系统、继电器控制组和散热器组构成,是机器人中枢神经控制器,控制协调机器人各个系统,实现与上位机交换数据[5]。电源管理模块包括高容量高功率聚合物锂电池组,用来实现电池电压、电流的检测与保护。运动控制模块包括大功率高速直流电机、驱动器、编码器,通过接收控制器指令,驱动电机实现前进、拐弯、加速、停止等功能。云台检测模块包括可见光摄像机和红外热像仪,监测系统采用双通道,其中可见光通道用于监测设备视频的可视化情况,红外通道用于监测发热设备的热温度图像。
1.2 巡检机器人软件介绍
超特高压变电站巡检机器人系统通过无线网络建立起终端层与基站层的联系,终端层负责接收数据和下达命令,基站层负责采集图像与数据。系统包括一键启动功能、休眠功能、任务定制功能、定时器起停功能、设备历史曲线查询功能与巡检数据查询功能等。
一键启动功能。在桌面建立了一键启动快捷方式,如图3所示。每次启动软件只需要双击一键启动快捷方式,而且该步骤增加了守护功能。当软件被误关掉时,软件会自动检测进程,进程没有的会自己启动。
任务定制功能。根据站内寻求,若临时需要在一个周期时间内检测某一间隔设备,不需要创建特定任务。可以通过任务定制的方式,在任务定制的界面里创建需要巡视的设备。针对该任务下发配置,依次打开控制巡检任务界面点击任务定制,即可实现任务定制功能。任务定制功能如图4所示。
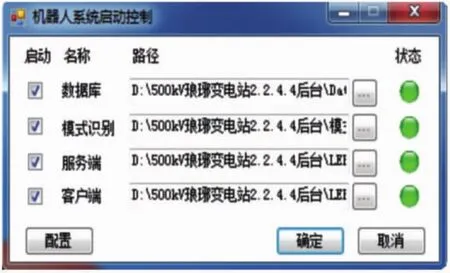
图3 变电站巡检机器人系统启动控制
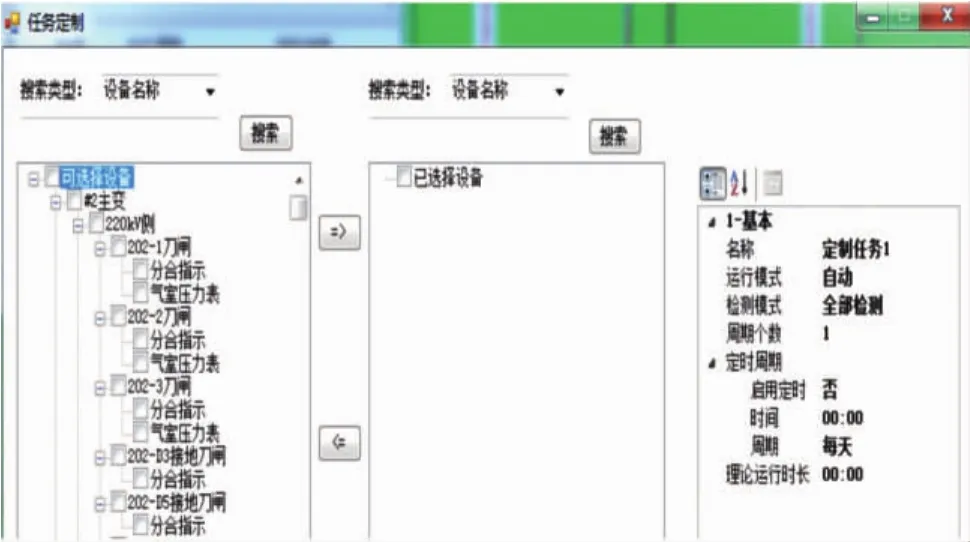
图4 变电站巡检机器人任务定制功能
巡检数据查询与报表查询。数据查询。一键启动软件后,依次点击分析巡检数据选择查找起止时间查询,即可查询到该时间段机器巡检数据。
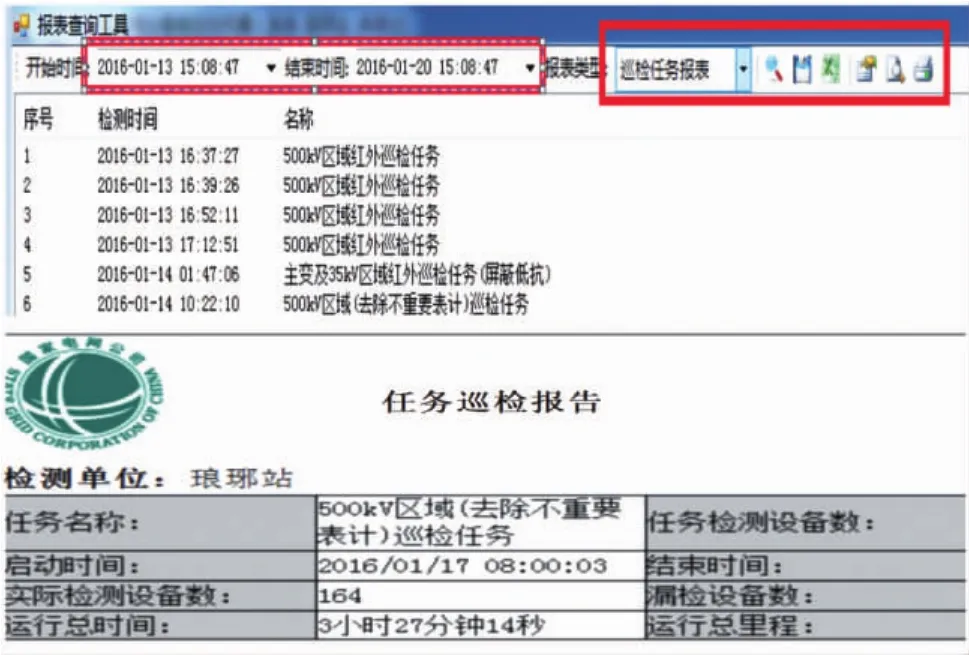
图5 变电站巡检机器人查询功能
报表查询。一键启动软件后,依次点击分析报表查询选择查找起止时间选择查询报表的类型查询,即可查询到该时间段内机器报表数据。任务巡检报表界面如图5所示。
2 机器人在变电站的应用
在电力系统运行的各类设备缺陷中,设备发热缺陷已被定性为影响电网安全运行的重要因素。针对变电站的实际情况,介绍巡检机器人在变电站的两种典型应用场景。
2.1 设备红外测温
基于便捷、使用简单的优点,红外成像仪通常用于检测设备外表温度,主要由光学系统、光电探测器、信号放大及信号处理、显示输出等部分组成。红外成像仪通过将光能转换为电信号,经过线性处理后便可实现对被测目标的温度检测。
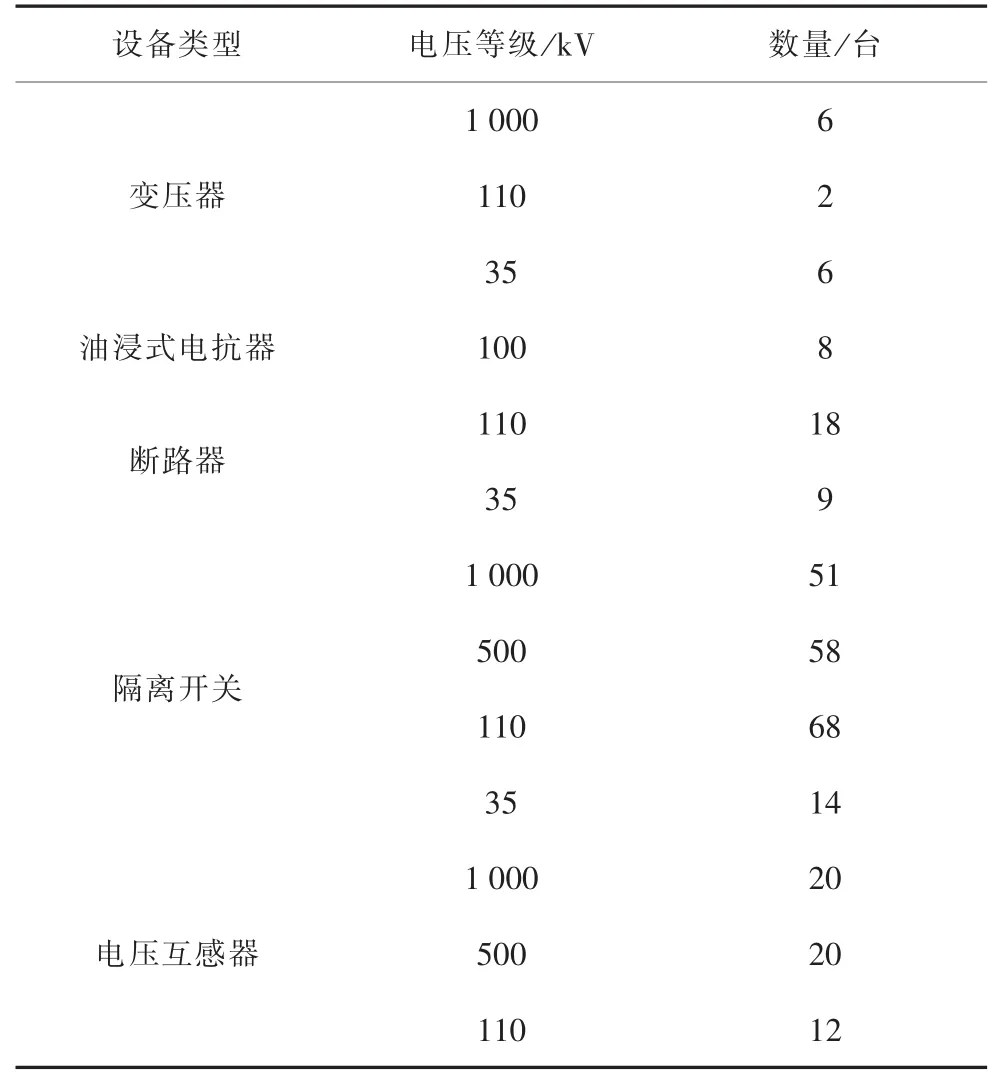
表1 被检设备参数
检测目的。对超特高压变电站高压电气设备进行红外测温,排查主要变电设备隐患,确保变电站安全稳定运行。
检测方法。先用红外成像仪对设备待检测位置进行全面扫描,检测出温度异常部位;然后对异常部位进行准确测温得到当前设备准确温度;最后根据相关标准计算相对温差,进行缺陷判断与处理。特高压变电站的被检设备参数如表1所示。
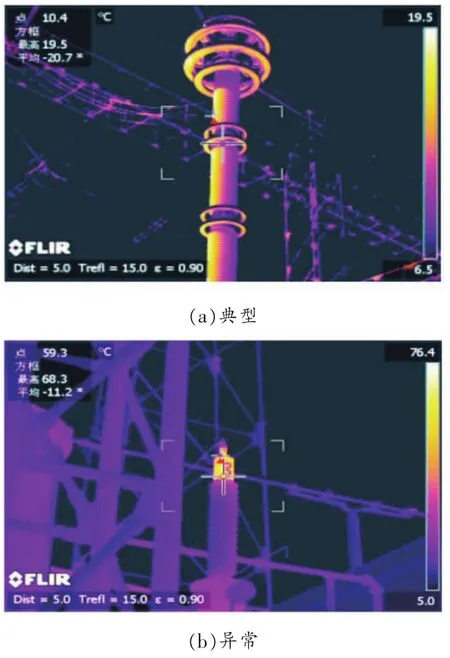
图6 设备红外图谱
检测结果:设备典型红外图谱如图6(a)所示,温度约10℃,湿度约52%;设备异常红外图谱如图6(b)所示,温度超出设备正常发热温度。对超特高压变电站内设备进行全面的红外温度测试,发现并联电抗器A相中性点套管端部异常发热,根据DL/T 664—2008《带电设备红外诊断应用规范》规定,该缺陷为套管柱头处缺陷,本次测试温度为68.3℃(>55℃),属于严重缺陷。
2.2 超声波带电检测
超声波带电检测是将超声波传感器放在设备表面,若是变压器内部存在局部放电,此时电流将以脉冲放电的形式撞击周围介质,形成超声波信号,从而判定设备内部存在局部放电现象[6]。超声波带电检测原理如图7所示。
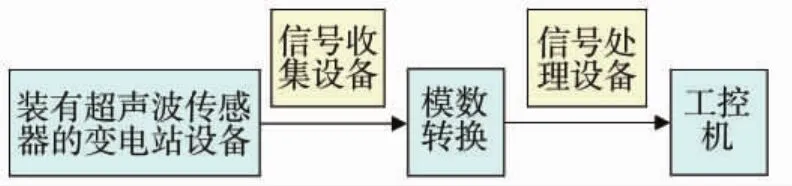
图7 超声波带电检测原理
检测目的。通过对特高压变电站进行超声波局部放电检测,排查站内设备隐患,确保变电站安全稳定运行。被检设备技术参数如表2所示。
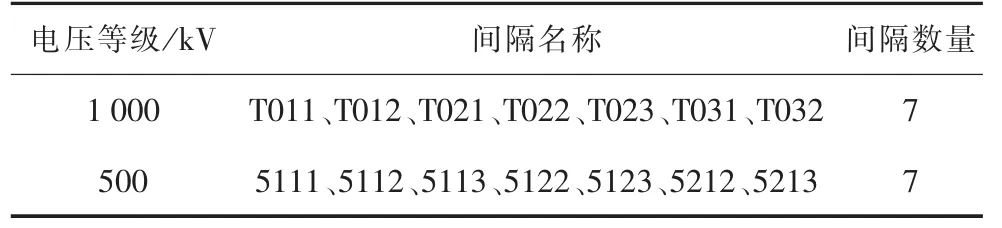
表2 被检设备技术参数
检测方法。首先连接检测仪器与检测探头,仪器开机自检;然后将检测探头放置在设备罐体侧下方进行检测;最后更换检测点,每隔0.5m选取一个测点,对其他部位进行检测。
检测结果。被检设备典型数据如表3所示,经分析比较,特高压变电站未发现异常超声波局放信号。
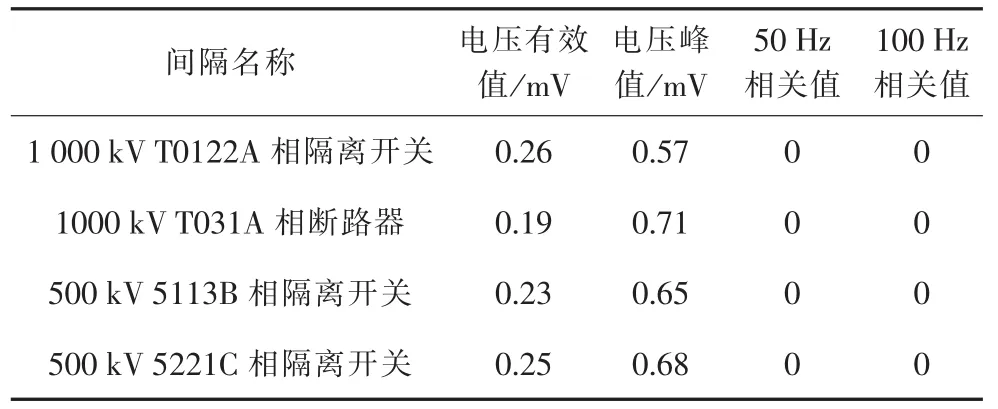
表3 被检设备典型检测数据
3 结语
介绍了变电站巡检机器人在超特高压变电站的应用。包括巡检机器人的硬件组成和软件组成以及机器人的现场应用情况。重点介绍了巡检机器人在特高压变电站内进行设备红外测温和超声波带电检测的应用。在变电站内进行机器人巡检,可辅助或取代变电站工作人员进行日常的设备巡检、红外测温等工作,切实提高了巡检的工作效率和质量,降低变电站运行人员的劳动强度和工作风险,是变电站巡检技术的发展方向,具有广阔的发展空间和应用前景。
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
金桥(2021年4期)2021-05-21 08:19:20
电子制作(2019年7期)2019-04-25 13:17:14
电子制作(2018年17期)2018-09-28 01:56:38
光学精密工程(2016年3期)2016-11-07 09:03:43
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
电子制作(2016年21期)2016-05-17 03:52:47
水利科技与经济(2016年4期)2016-04-22 03:49:32
通信电源技术(2016年3期)2016-03-26 07:13:22
现代企业(2015年6期)2015-02-28 18:51:53