变时滞耦合不确定复杂网络修正函数投影同步
2018-07-23 05:30:40杜海明郑州轻工业学院电气信息工程学院河南郑州450002
郑州大学学报(工学版) 2018年4期
方 洁, 杜海明, 刘 娜(郑州轻工业学院 电气信息工程学院,河南 郑州 450002)
0 引言
近年来,随着人们对复杂网络研究的深入和对其应用的不断推广,复杂网络研究已经逐渐渗透到各个学科领域,并取得了一系列研究成果.同步现象是一类非常普遍而重要的非线性现象,复杂网络的同步研究是复杂网络研究的一个重要方向[1-4].
函数投影同步和修正函数投影同步是近几年刚刚兴起的新的混沌同步方法,其实现同步的同步尺度因子是一个函数而不是常量,函数尺度因子的不可预测性对提高混沌保密通信的安全性具有非常重要的潜在应用价值,因此对混沌系统的函数投影同步研究具有重要的理论价值和现实意义[5-9].随着复杂网络研究的蓬勃发展,已有学者对复杂网络的函数投影同步问题进行了研究[10-11].
对于很多实际的复杂网络,总是不可避免地存在网络自身的不确定性以及外界干扰和时滞等因素.因此,实现具有不确定参数、外界干扰和时滞的复杂网络的同步更具有实际意义.文献[12]基于Lyapunov稳定性理论和泰勒展开实现了具有不确定参数、外界干扰和常时滞耦合的复杂网络的函数投影同步.考虑到绝对的常时滞耦合在实际网络中可能是不存在的,文献[13]进一步研究了具有变时滞耦合的复杂网络的函数投影同步,但没有考虑不确定参数和外界干扰的影响.文献[14]利用牵制控制方法,分别对节点参数未知和拓扑结构未知的两类复杂网络,设计了自适应控制器,使得两类网络和其孤立节点实现函数投影同步.其目标函数是网络中的一个节点,而且是按固定的函数尺度因子实现同步,而不是一个函数矩阵.此外,该研究虽然分别考虑了参数未知和拓扑结构未知的影响,但没有考虑外界干扰的影响.
基于以上讨论,笔者将基于Lyapunov稳定性理论和不等式变换理论,设计简单的鲁棒自适应控制器,实现具有不确定参数、外界干扰及时变时滞耦合的复杂动态网络的修正函数投影同步.实现同步的目标函数可以是一个平衡点,周期吸引子或者混沌轨道.该方法不仅能对网络中的未知参数进行估计,同时也能有效地克服未知有界干扰和时变时滞的影响.控制器中的反馈控制增益可随自适应律自行调节,不需要人为设定.数值仿真验证了该方法的正确性和有效性.
1 问题描述
具有时变时滞耦合的复杂动态网络模型描述如下:
(i=1,2,…,N).
(1)
其中,xi(t)=(xi1(t),xi2(t),…,xin(t))T∈Rn是第i个节点的状态变量;f:Rn→Rn是向量函数;F:Rn→Rn×m是矩阵函数;θi∈Rm是未知的参数向量;τ(t)≥0 是未知的时变耦合时滞;Δi∈Rn是外界干扰;ui(t)∈Rn是控制输入;c表示耦合强度;Γ1=diag(r1,r2,…,rn) 和Γ2=diag(ζ1,ζ2,…,ζn) 是内耦合矩阵,其中ri=1 和ζi=1 表示第i个状态,意味着两个节点通过第i个状态变量耦合;A=(aij)N×N和B=(bij)N×N是外耦合矩阵,表示网络的拓扑结构,如果节点i和节点j(j≠i)之间有连接,则aij≠0,bij≠0,否则aij=bij=0(j≠i).定义矩阵A,B对角线上的元素满足:
(2)
其中,i=1,2,…,N.
定义1(MFPS):对具有模型不确定、外界干扰和时变时滞耦合的复杂动力系统(1),如果存在连续可微的函数矩阵M(t),使得系统(1)和目标函数s(t)满足式(3),则称系统(1)和目标函数s(t)实现了修正函数投影同步.
i=1,2,…,N.
(3)


假设2:外界干扰Δi(t)是有界的, 即存在正常数di,使得‖Δi‖≤di,i=1,2,…,N.
引理1[15]:对于任意两个向量X、Y∈Rn,存在正定的矩阵Q∈Rn×n,使得以下不等式成立:2XTQY≤XTQQTX+YTY.
2 控制器设计
定理1:对给定的函数尺度因子矩阵M(t)和任意的初始值s(0)、xi(0),如果假设1和假设2成立,则在控制器(4)和自适应律(5)、(6)、(7)的作用下,复杂网络动力系统 (1) 和目标函数s(t)能实现修正函数投影同步.
(4)
自适应律
(5)
(6)
(7)

证明: 定义误差向量
ei(t)=xi(t)-M(t)s(t),(i=1,2,…,N).
(8)
式 (8) 对时间求导可得
(i=1,2,…,N).
(9)
将 (1) 和 (2) 代入 (9)可得

(10)
将式(4) 代入式(10)可得
(11)
选择如下的Lyapunov函数

(12)

对V(t)求导可得
(13)
将控制器 (4) 代入 (13)可得
(14)
将自适应律 (5)~(7)代入上式可得
(15)
定义e(t)=(e1T(t),e2T(t),…,eNT(t))T∈Rn×N,
P=(A⊗Γ1),Q=(B⊗Γ2),其中⊗表示克罗内克积.
(16)
(17)
由引理1可得


(18)
由此,可以通过选取适当的q*,使

(19)


注2:因为控制器(4)中不连续的符号函数signei会产生不期望的抖振,在实际中可用双曲正切函数tanh(ξei),ξ>0代替符号函数来消弱抖振现象.不连续控制器可通过带自动积分限幅功能的控制元件实现.最后的控制输入为:

(i=1,2,…,N).
(20)
3 数值仿真
以Chen混沌系统为目标函数来证明所提方案的有效性.Chen混沌系统描述如下:
其中,s1、s2、s3为状态变量,r1、r2、r3为系统参数.当r1=35,r2=3,r3=28时,该系统处于混沌状态.
复杂动态网络描述如下:

Δi(t)+ui(t).
其中,τ是时变时滞耦合,控制器可依据定理1设计如下:
其中,i=1,2,…,N.
自适应律为:
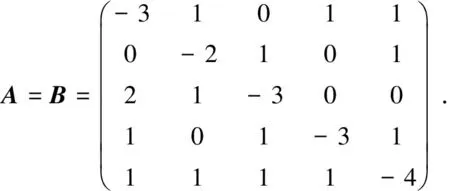
在数值仿真中,设定c=0.1,N=5,Γ1=Γ2=I3×3.外耦合矩阵:
仿真结果如图1~3所示.图1为同步误差曲线图.图2为参数θi1和θi2的估计值.图3为外界干扰界值di和反馈增益qi随时间进化曲线.由仿真结果可知,误差信号经过短时间的震荡后衰减到零,即复杂动态网络和目标函数实现了修正函数投影同步并实现了对未知参数的估计.仿真结果证明了理论分析的正确性.
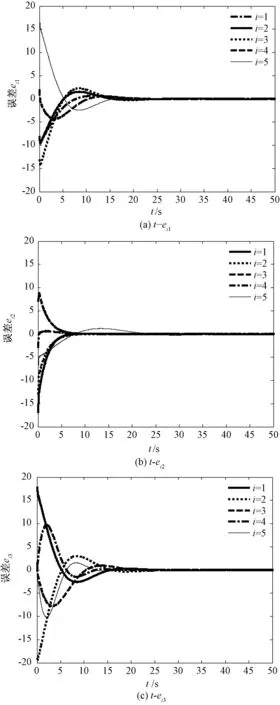
图1 同步误差曲线Fig.1 The time evolution of synchronization errors
4 结论
研究了复杂动态网络的修正函数投影同步问题,考虑了实际网络中不可避免的模型不确定、外界干扰及时变时滞耦合的影响.通过构造合适的Lyapunov函数,证明了同步误差系统的稳定性.该同步控制方法能有效地克服未知有界干扰和时滞耦合的影响,对具有常时滞耦合和时变时滞耦合的复杂动态网络均适用.以Chen混沌系统为目标函数进行数值仿真,仿真结果证明了该方法的有效性.
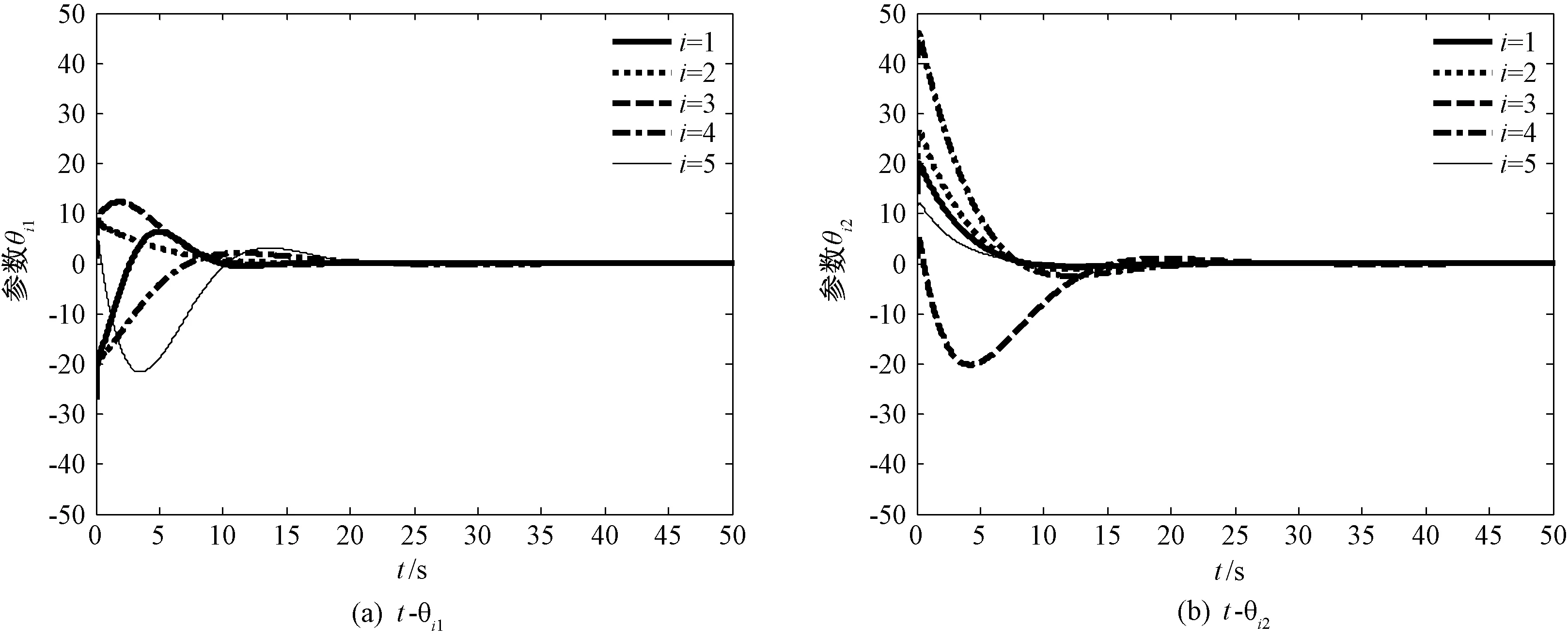
图2 参数θi1和θi2的估计值Fig.2 The estimated parameters θi1 and θi2
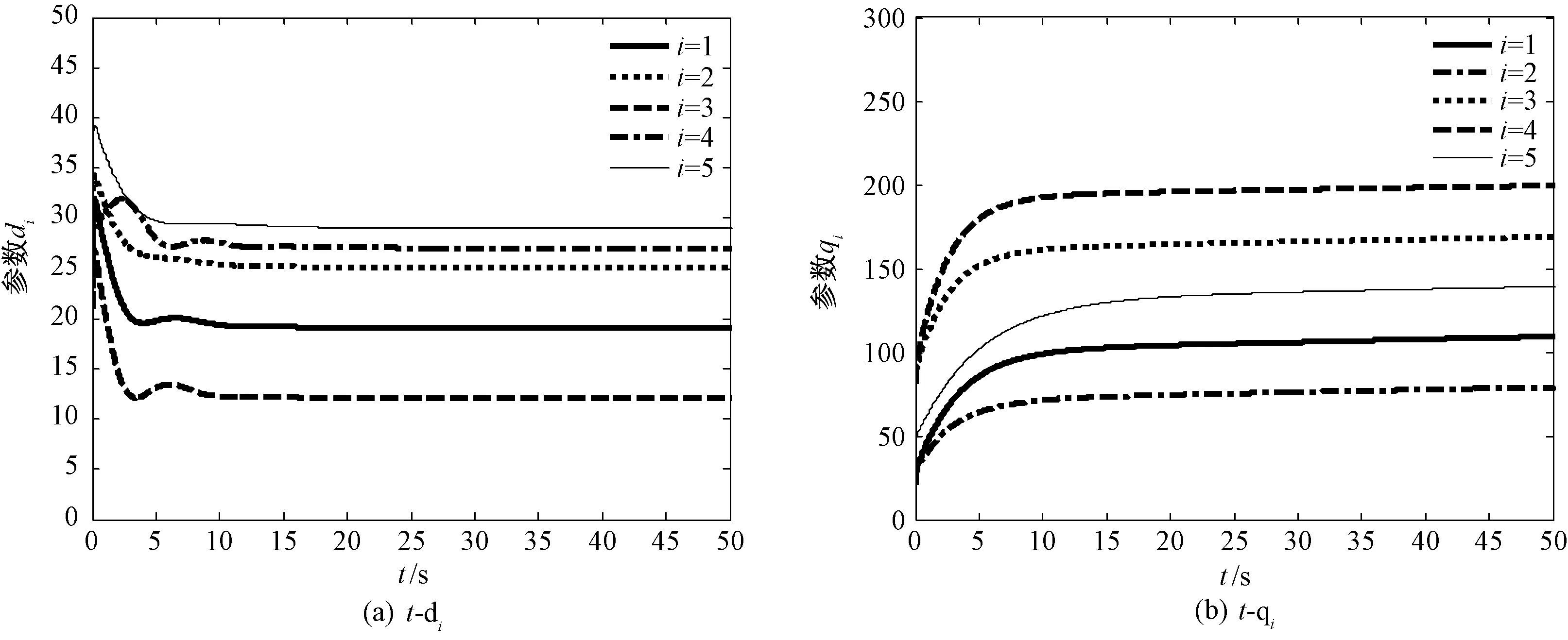
图3 参数di和qi的时间进化曲线Fig.3 The time evolution of parameters di and qi
猜你喜欢
云南画报(2022年4期)2022-05-05 06:00:26
数学物理学报(2020年5期)2020-11-26 06:06:48
中学课程辅导·教学研究(2017年11期)2017-09-23 13:22:33
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
人间(2015年20期)2016-01-04 12:47:20
中国铁道科学(2015年4期)2015-06-21 06:46:08
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:40
应用数学与计算数学学报(2014年3期)2014-09-26 12:03:52
东北石油大学学报(2012年4期)2012-03-20 13:36:35