面向先进装备制造业的室内空间测量定位系统
2018-07-19 06:47:44邾继贵郭思阳史慎东林嘉睿杨凌辉任永杰
计测技术 2018年3期
邾继贵,郭思阳,史慎东,林嘉睿,杨凌辉,任永杰
(天津大学 精密测试技术及仪器国家重点实验室,天津 300072)
0 引言
制造业是国民经济的重要支柱和基础[1],以飞机、火箭、船舶、卫星等为代表的大型先进装备制造业更是国家工业水平和科技实力的集中体现。精密测量技术一直以来都是作为制造工艺环节的一项关键质量控制手段而存在,高性能的大空间精密测量已经成为航空、航天、航海等大型装备数字化制造不可或缺的支撑环节。
在以大型飞机、运载火箭为典型代表的先进航空航天装备制造业中,由于产品整体尺寸较大,国内外纷纷采取前期分段制造、后期总装对接的工艺手段[2]。美国波音公司布置多台激光跟踪仪,进行飞机构件的测量,以实现大尺寸工件的装配与检测,保证对接装配与位姿调整的精度[3-4];在以船舶为代表的造船业中,日韩等造船强国已经搭载全站仪,准确地分析出所测量的零件、分段、总段的三维立体数据,再对船体结构实施模拟搭载,有效压缩建造周期[6-7]。
现代工业的进一步发展向大空间精密测量提出了新的要求与挑战[8]:①更大的测量空间:随着先进装备制造技术的进步与发展,超大型装备制造的发展趋势使得精密测量的研究对象尺度大幅度扩展[9]。近年来国家先后启动了大型飞机重大科技专项和超大型船舶制造等一系列重大工程,正推动着装备制造业快速发展,这些范围一般在百米以上的大尺寸测量也在向高精度、精细化的方向发展。目前的先进制造业中,精密测量需要同时兼顾工程测量的大尺度与传统精密测量的高精度,面临着严峻的挑战。②更高的测量效率:随着航天型号数量和产能需求不断增加,航天装备制造呈现出研制周期短、任务多、质量与可靠性要求高等特点,现阶段持续高密度发射的型号需求与“多研制,少生产”任务形势下建立起来的传统的生产模式不相适应,其中,低效率的测量制约着整体生产建设的速度[10]。同样,船舶行业曾是典型的劳动力密集型产业,要提高生产效率,必须推进高效率数字化测量的新方法[11]。
面对这些越来越苛刻的测量需求,传统单站式测量系统(例如激光跟踪仪、全站仪)的局限性逐渐暴露出来。单站式测量系统量程有限,在大型测量现场中无法全部覆盖被测产品,比如船舶制造现场等,目前在工业现场普遍布置多个单站式测量系统,通过外部公共控制点依次将各个独立坐标系统一至整体坐标系,这种串行组网方式测站之间约束性不强,容易形成误差累积;另一方面,单站式测量系统只能实施单目标测量,大大限制了测量效率。
相比之下,分布式测量系统的优势逐步得到体现。分布式多站测量系统摆脱了传统以单个测站为核心的测量模式,通过多个测量单元构建出测量尺度可拓展的大型测量网,同时分布式测量系统具有可并行测量等优势[9,12]。目前,以空间角度交会测量原理为基础的测量系统已经逐渐应用于先进装备制造领域,其中以天津大学精密测试技术及仪器国家重点实验室研制的室内空间测量定位系统(wMPS)为典型代表[13]。wMPS受全球定位系统(GPS)理念的启发,将旋转激光扫描角度传感原理与大尺寸空间整体网络式测量理念相结合,具有亚毫米级的测量精度,是一种高精度、高测量效率的三维坐标测量系统[14],为大型装备制造业中的精密测量提供了全新的思路。
1 传感机理
室内空间测量定位系统是基于多站测量方法而构建的一种具有空间分布的网络测量系统,系统中多个发射基站经过高精度标定建立大型测量网络,测量网络内的被测对象可以获取不同测站的激光信号,通过融合解析得到具体三维坐标。如图1所示,室内空间测量定位系统主要包括:发射站、接收器、信号处理器以及测量任务计算机[9]。
发射站结构如图2所示,由旋转平台与固定基座组成,基座内部安装有电机、码盘与同步脉冲激光器,两只线型激光器呈一定角度安装于旋转平台。当处于工作状态时,旋转平台高速旋转,两只激光器随着转台向全周方向发射激光信号;同时,每当转台旋转至码盘初始位置,均会发出脉冲信号并触发基座上的同步脉冲激光器,此同步脉冲信号作为旋转平台单周旋转的时间起点。接收器内部含有光敏元件与信号处理单元,当接收到激光信号,接收器将其转化为电信号,信号处理电路对电信号进行放大并传递至前端处理器。前端处理器通过内部高速FPGA解算接收到的信号,时间信息。中心计算机处理传递过来的时间信息,计算各个接收器的精确坐标,完成测量任务。
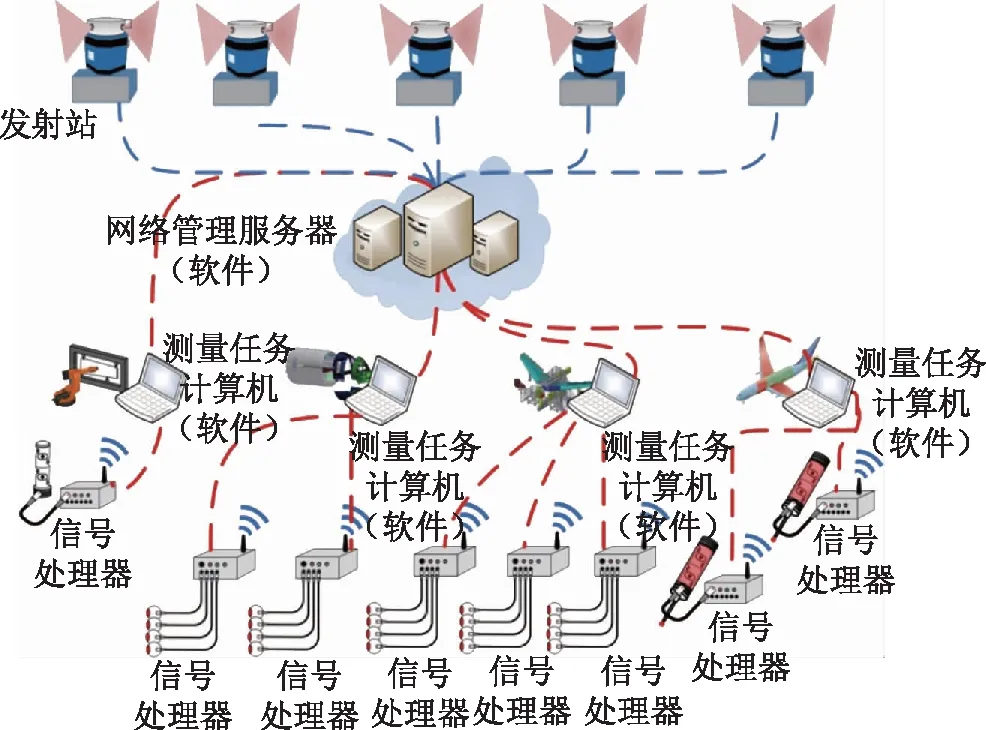
图1 wMPS设备构成

图2 发射站结构图
并记录对应的测量过程中,多个发射站被布置在测量空间中,通过高精度标定过程将各个发射站坐标系统一,构建整体测量网络;接收器只需接收任意最少两个发射站的信号,即可实现接收器所在位置的坐标解算。wMPS的基本传感机理包括两部分:基于光电扫描实现单发射站与接收器之间的相对角度测量与基于多发射站之间的角度交会实现空间坐标测量。
1.1 基于光电扫描的空间角度测量[9-15]
发射站需要产生同步光脉冲作为接收器计时起点信号,其使用光电编码器每周期发出脉冲信号作为同步光脉冲的触发信号,发射站转子与码盘一起旋转,当码盘经过零点时会产生触发信号。
接收器内部安装有光敏元件,测量时,接收器被安装在待测位置,通过处理器内部晶振进行计时。计时原理如图3所示,当扫描光平面处于初始位置时,发射站向全周发射同步光脉冲,接收器接收到同步光脉冲作为计时起点,旋转过程中,发射站扫描光平面依次经过接收器光敏单元,第二个光平面扫过接收器时刻作为计时终点,当一个周期内缺少光信号,则跳过此旋转周期。处理器通过同步脉冲信号与扫描光信号的时间间隔准确地得到对应的扫描角θ。由于扫描光平面均匀扫描经过接收器光敏区,电路中形成一定宽度的脉冲波形,故定义波形中心时刻作为信号到达时刻。
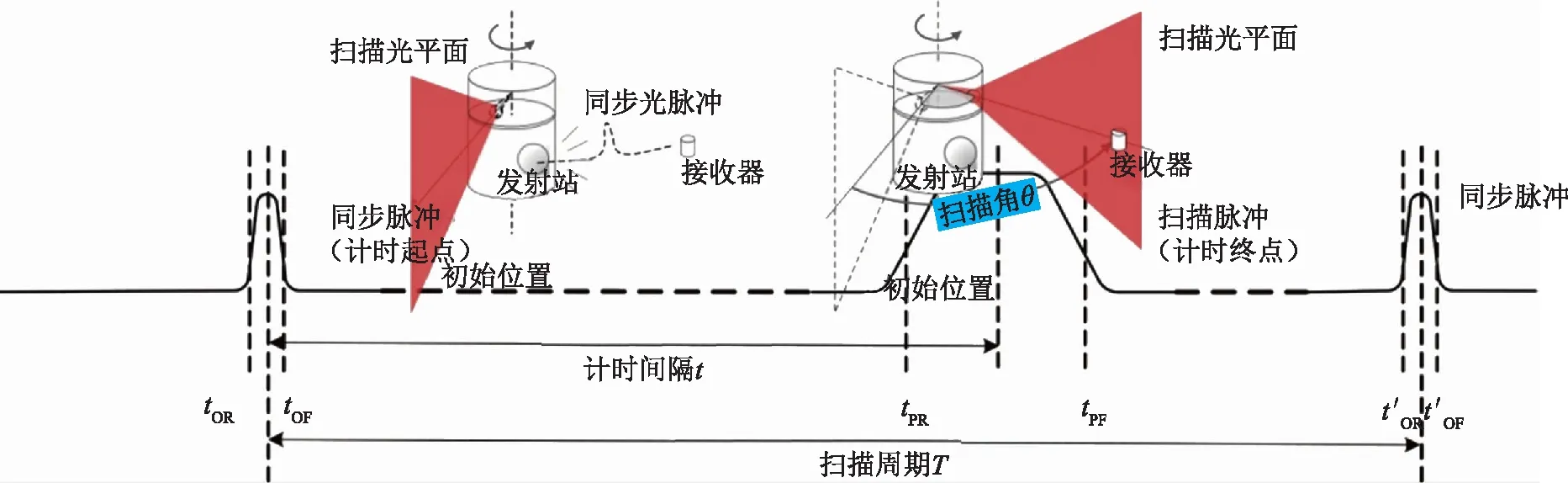
图3 接收器计时原理
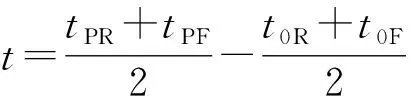
(1)
(2)
(3)
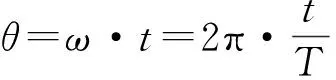
两个激光器光轴垂直安装时,对称位置安装配重块以协调转子质量分布,两个光平面在空间各个位置处产生的信号如图4所示,根据发射站旋转方向与光信号到达接收器的先后顺序区分对应的光平面,从而得到正确的光信号顺序。
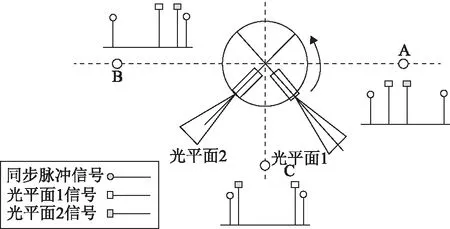
图4 发射站信号顺序判断示意图
1.2 基于角度交会的多站空间坐标测量[15-20]
发射站坐标系定义如图5(a)所示,旋转轴为Z轴,方向指向发射站顶端。X轴为发射站初始时刻激光器1光轴所在位置,Y轴符合右手法则。激光器2与激光器1呈90°安装。
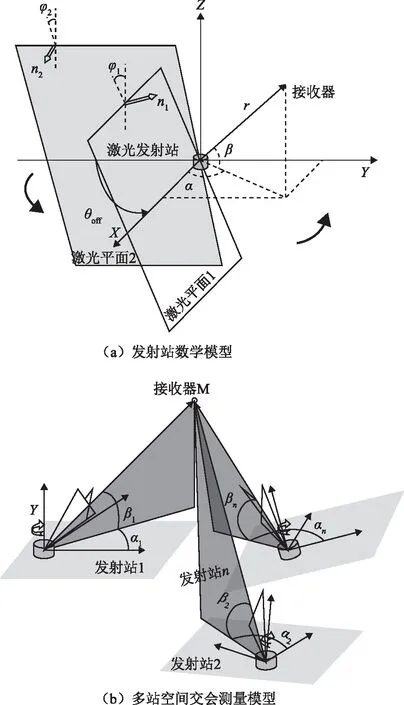
图5 wMPS 数学模型
初始时刻,发射站两个光平面提前标定,光平面方程为
(4)
当发射站的光平面分别扫过接收器,对应的扫描时间与空间扫描角度θ1与θ2可解算获得。现场多个发射站之间的相对位姿关系提前标定,当各个发射站的光平面均经过接收器,如图5(b)所示,根据交会条件,可以构建超定方程组,通过最小二乘求解即可求出待测坐标。
(5)
式中:[amn,bmn,cmn,dmn]为发射站的光平面方程;m(m≥2)为发射站的编号;n为发射站光平面的编号;R(θmn)T为发射站的各个光平面旋转过程中的旋转矩阵;θmn为发射站的各个光平面的旋转角度;Rm与Tm为各个发射站之间的相对位姿关系;C=[x,y,z]为在发射站全局坐标系下的待测坐标。
2 关键技术
室内空间测量定位系统在不断的发展与完善,衍生出一些关键技术,旨在提高测量精度与使用效率,优化整体性能,其中包括硬件性能的提升、算法的优化与改进等。
2.1 发射站性能优化[16]
发射站的转子上安装有激光器,因此需要对发射站的转子进行供电,然而常规的供电方式容易造成摩擦、机构磨损等情况,因此发射站采取非接触耦合感应供电技术,免(低)维护,增加系统的可靠性。同时通过仿真方法获得水平角误差、垂直角误差、扇面参数与旋转速度,优化选择发射站结构参数,包括光平面倾角、夹角等。
发射站转速的稳定程度制约着最终坐标测量精度,因此发射站采用无刷直流电机作为测站的驱动装置,克服了电刷和换向器的磨损问题,即使在很高的转速下仍可保证高可靠性、高效率及低电磁干扰,具有更好的长期稳定性;同时采用光电编码器作为电机转速反馈单元,通过伺服控制系统的架构及相应PID控制算法来保证测量精度。电机转子与发射站转子进行一体化设计,取消了原发射站联轴器装置,减少了误差传递环节,从而提高了转台旋转稳定性,使发射站测角准确度得到了较大的提升。
2.2 发射站结构参数(内参)标定[17]
当发射站安装调试之后,激光器光平面与转轴之间的关系保持不变,需要通过辅助手段标定发射站的结构参数,即两个光平面与自身坐标系的关系;目前,外部需要构建高精度的坐标控制场,结合非线性最小二乘优化方法,进行发射站结构参数的标定,如图6所示。
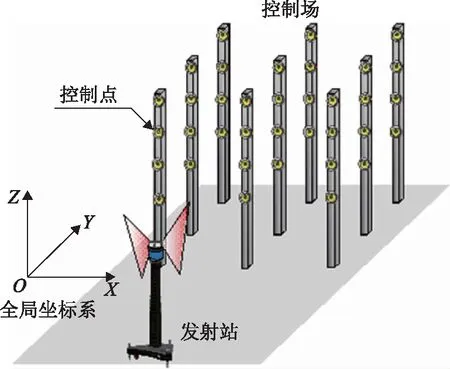
图6 基于高精度控制场的发射站结构参数标定
首先,利用激光跟踪系统建立一个基于冗余长度约束的精度控制场,即将单台激光跟踪仪放置多个站位,基于各个站位下的高精度长度约束优化跟踪仪测角误差,以此建立高精度三维坐标控制场[18]。基于此坐标控制场,使用发射站分别扫描控制场内各个点,建立光平面约束方程,同时结合旋转矩阵正交约束条件,通过非线性最小二乘优化求解发射站的结构参数。
2.3 多发射站组网标定[12]
wMPS测量前需要对所有发射站进行组网定向,组网定向普遍通过基准量(例如基准坐标或基准长度),获得多个发射站坐标系之间的变换关系。典型方法有基于基准尺的组网定向,如图7所示,通过基准尺进行组网消除定向过程中控制点坐标已知的条件,更加方便灵活。
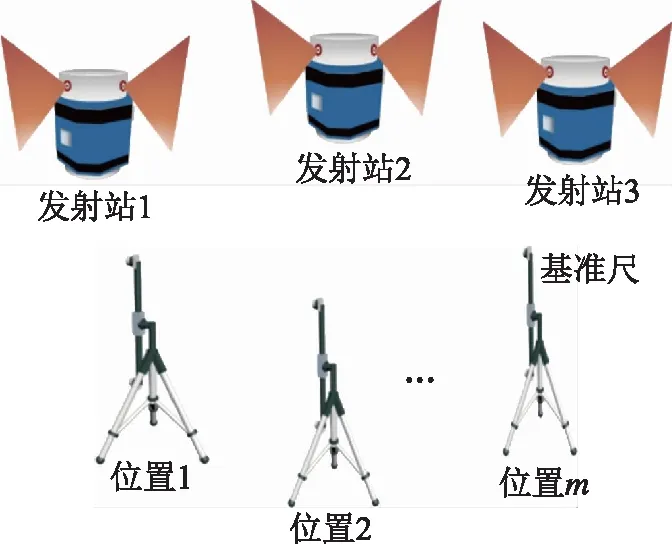
图7 基于基准尺的系统组网标定
基准尺由热膨胀系数较低的材料制作而成,例如碳纤维等,基准尺两端均安装有接收器。因为接收器尺寸与激光跟踪仪标准球尺寸一致,可以使用激光跟踪仪标定出基准尺两端接收器的光学中心之间距离,为后续的全局定向提供准确的长度约束基准。定向时,基准尺摆放若干位置,在每个位置处基准尺两端接收器接收全部发射站发出的光信号,各个坐标点未知,根据基准尺距离约束建立约束方程,通过非线性最小二乘算法即可求解全局定向参数。
2.4 测量系统布局优化[19-20]
作为分布式测量系统,多个发射站之间的空间构型(包括布站区域、测量区域等)影响着整体测量精度,在测量现场需要尽量以最优的构型方式进行发射站布置,以最大程度减小因空间构型引起的测量误差。
几何精度衰减因子(GDOP)是评价wMPS空间构型质量的一种有效指标,是衡量定位精度的一个无量纲系数,它指发射站的测角误差引起的发射站与接收器之间的距离矢量放大因子,其与接收器相对发射站的几何构型有关。发射站与接收器之间的几何分布程度越好,定位精度越高,GDOP越小。GDOP受发射站的数目与其网络布局结构有关,相同布局下,发射站数目增多,GDOP值越小,定位精度越高;当发射站的数目相同,不同的网络布局结构同样制约着GDOP与定位精度,如图8所示。
在布局优化方案中,针对发射站覆盖能力、GDOP与发射站成本等指标建立评价函数,通过最优化算法计算测量系统的最优布局,以此指导现场发射站的布置情况[21]。
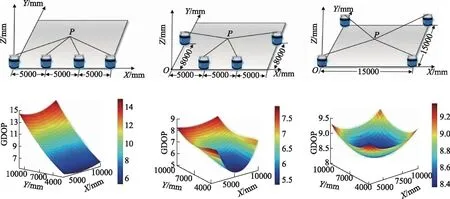
图8 不同网络布局与GDOP的关系
2.5 单站式三维坐标测量[2]
在环境复杂的测量现场中,通常工件体积巨大、现场测量空间不足,同时各部件互相遮挡,很难具备理想的通视条件。针对上述问题,一种无需布局的单站式测量解决方案应运而生。
具体方案如图9所示,此方法通过多接收器靶标进行测量,多接收器靶标上设定有一定数量的接收器(不少于六个)及一个接触式测头,各个接收器位置以及接触式测头通过激光跟踪测量系统或者影像测量仪提前标定。测量时,发射站固定于空间某处,测量靶标上的接收器接收激光信号,建立光平面约束方程。当测量靶上拥有足够数量的靶标,结合已标定的相互坐标关系,可建立超定方程组,通过空间后方交会方法求解靶标坐标系与发射站坐标系之间的位姿关系,并最终得到靶标测头坐标。
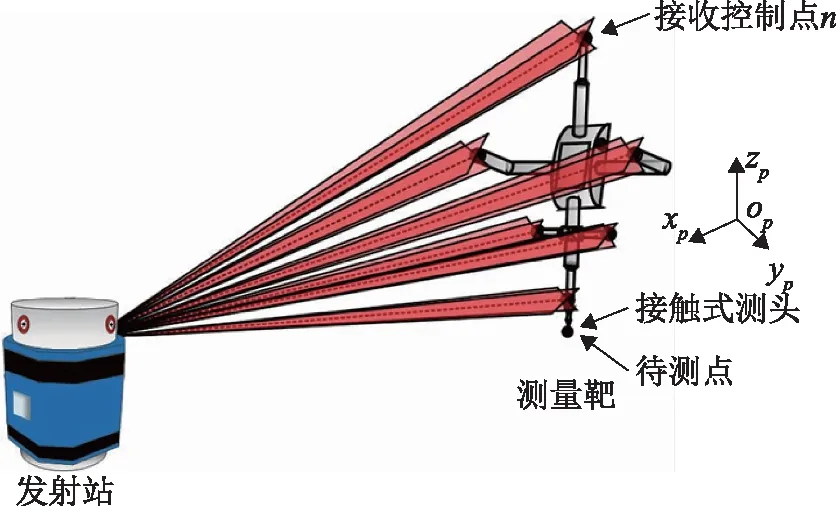
图9 基于后方交会原理的单站坐标测量方法
2.6 测量系统补偿与修复[22]
测量过程中,稳定的系统布局结构是精确测量的重要基础,保证了多个基站准确处于一个基准坐标系下。然而在复杂现场环境中,分布式的特性使得wMPS 更容易受到外界振动的干扰。针对此问题,通过恒定不变的基准量对测量系统进行监控与补偿是比较有效的方式,例如以空间中基准参考点或者惯性元件作为基准等等。
图10为基于倾角传感器的单站自我补偿方案。根据发射站的测量模型,双轴倾角传感器与转轴刚性连接,并固定在正下方,通过外界水平参考坐标系与高精度的机械调整标定倾角传感坐标系与发射站坐标系的相对位姿。倾角传感器实时感知重力方向,当发射站姿态发生变化,倾角传感器姿态同时发生改变,倾角传感器示数改变。发射站姿态改变程度可以通过倾角传感器示数变化范围来判断。当姿态改变程度较大,
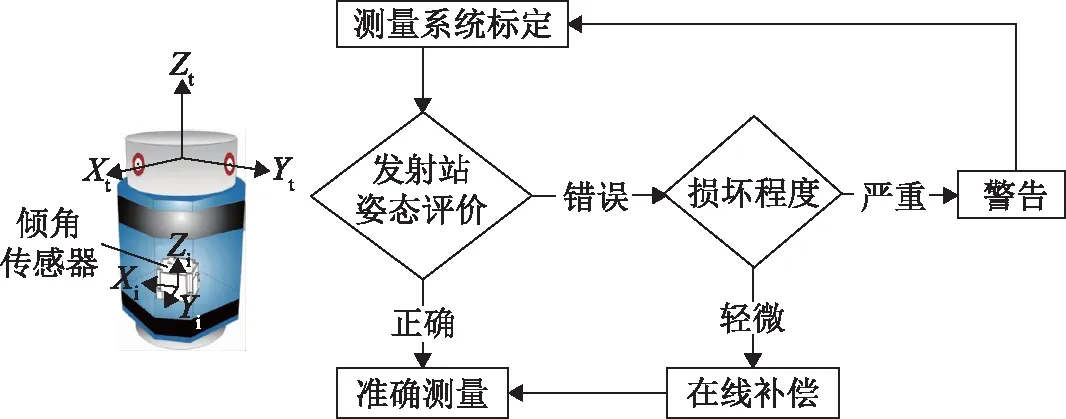
图10 基于倾角传感的发射站姿态补偿方法
即说明发射站需要重新标定,当姿态改变程度较小,可通过倾角传感器的示数变化进行位姿补偿。
2.7 动态误差补偿
wMPS测量原理为基于旋转激光扫描的空间角度交会测量,一般要求接收器处于静止状态。若在AGV(Automated Guided Vehicle)导航或航天GNC(Guidance,Navigation and Control)仿真实验等场合,待测物体一直处于运动状态中,会不可避免地引入动态测量误差,影响wMPS的测量精度。
wMPS动态误差形成机理如图11所示:以双发射站为例,接收器的空间坐标解算需要依次接收发射站1和发射站2的同步光信号、扫描光信号。若接收器静止,虽然六个光信号到达接收器的时刻不同,但接收器始终位于同一空间位置。若接收器处于运动状态,在t1,t2,t3,t4,t5和t6时刻接收到六个光信号,其空间位置发生了变化,在t6时刻直接采用角度交会的解算方法求取坐标将产生动态误差。因此,不同发射站之间的时间对准以及不同激光信号之间的时间对准是解决动态测量的关键。
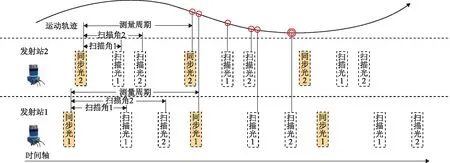
图11 动态误差形成机理
针对此问题,基于发射站同步的动态误差补偿方法被提出[12]。基于发射站同步的动态误差补偿通过插值方法实现同步并解算发射站坐标。首先,根据测量需求设置一系列的测量时间节点;其次,不同发射站的光信号通过插值方法回溯或者预测到同一节点时刻;最后,根据角度交会原理解得接收器在某一节点的动态坐标,实现误差补偿。
3 工业应用
wMPS作为多站分布式测量系统,根据测量范围等要求动态组建整体测量网络,同时具有多种测量手段(包括球形接收器、单站测量靶标等),满足各种测量任务需求,已经成为大尺寸空间内精密测量的有效手段。目前其已在航天、航空(包括飞机自动装配[23]、飞机水平测量[24]、AGV自主导航[25]等)等领域广泛应用。
3.1 大尺寸装配测量
wMPS已在飞机装配测量与船体分段检测中应用。图12(a)为wMPS应用于飞机装配测量[23],测量前首先根据装备的尺寸、待测区域布局以及待测特征等信息,合理优化发射站基站布置结构,然后通过基准尺等方式进行整体系统平差定向,确定各个发射站与整体坐标系之间的位姿关系,最后在待测位置布置相关测量工具,进行六自由度实时跟踪测量,同时将测量值与理论值进行比较,调整飞机姿态,完成最终装配。图12(b)为wMPS应用于船体分段检测,首先在现场布置若干发射站,保证发射站的测量区域完全覆盖待测物体,通过基准尺标定方式统一各个发射站的坐标系,通过测量球或者测量靶标的方式对船体分段进行关键点的尺寸测量,以保证分段的尺寸精度。
在大尺寸装配测量中,wMPS 克服了激光跟踪仪需要频繁转站、无法多任务测量的局限性,可大幅度提升大型装备制造业现场测量的质量与效率。
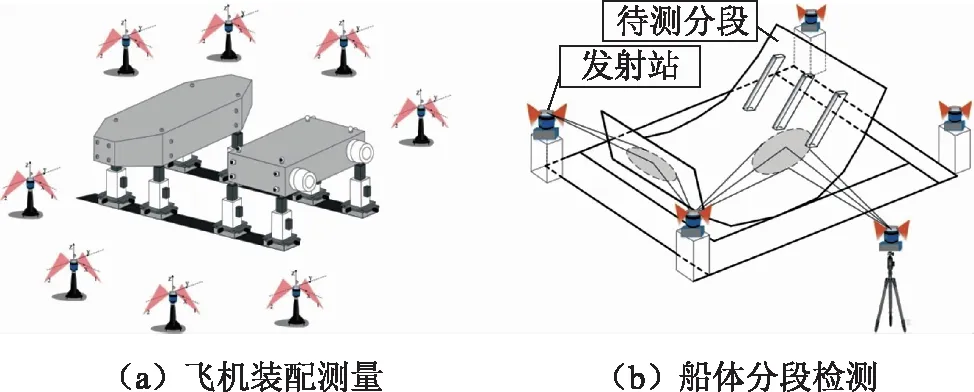
图12 wMPS应用场景
3.2 航天器交会对接
如图13所示,在航天GNC地面仿真实验中,需要同时测量追踪航天器与目标航天器的六自由度信息,根据两个航天器的相对位置对追踪器施加控制指令,直至实现交会对接。交会对接过程中,航天器运动范围大,运动峰值速度高,需要全程实时不间断测量二者的六自由度信息。为避免发射站光信号的遮挡问题,将倒装式发射站安装在屋顶的支撑结构上,设备向下发出光信号,避免了其他设备和空间中障碍物的遮挡,降低了对航天器运动自由度的限制,航天器顶部的接收器水平放置并接收光信号,通过动态补偿方法实现航天器的跟踪测量。
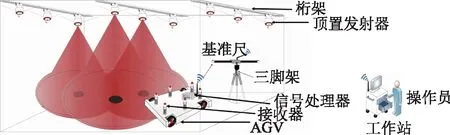
图13 航天GNC仿真实验
4 总结
wMPS是一种多站立体网络结构、多角度观测融合、可并行多任务的大空间整体测量定位系统,其以光电扫描空间角度测量原理与空间角度交会坐标测量原理为基础,发展过程中不断优化系统硬件性能,改进内部结构参数标定算法与组网定向算法,以布局优化策略为指导,实现高精度、高效率的静态测量方案;与此同时,单站式三维坐标测量靶被研制以扩展应用范围,基于重力基准的补偿算法与动态补偿算法被开发以增强系统可靠性。
综上所述,室内空间测量定位系统突破了传统精密测量中低效低精度的测量模式,避免了单站式测量系统中有限的测量量程,在保证测量精度的前提下大大提高了工作效率,有效协调了测量范围和精度的矛盾,同时,多种方案与优化算法的提出增强了系统使用的灵活性与可靠性,使得系统在大型装备制造业中具有更加突出的优势,应用前景十分可观。
猜你喜欢
雷达科学与技术(2022年3期)2022-07-01 08:16:38
中国测试(2021年10期)2021-11-12 02:11:16
铁道通信信号(2018年8期)2018-11-10 05:15:48
中文信息(2018年11期)2018-01-09 09:58:44
南方人物周刊(2017年25期)2017-08-25 06:06:50
科技传播(2016年10期)2016-07-15 22:29:57
公民与法治(2016年19期)2016-05-17 04:18:15
读者·校园版(2015年7期)2015-05-14 13:11:40
上海铁道增刊(2015年1期)2015-03-23 09:25:02
河南科技(2014年15期)2014-02-27 14:12:35