
项目驱动教学在“自动控制理论”课程中的应用
2018-07-18 12:56李传江袁秀平
黑龙江教育·高校研究与评估 2018年6期
李传江 袁秀平
摘 要:文章以实例论述了项目驱动模式在“自动控制理论”课程中的探索和应用。通过项目驱动教学实现授课理论与实践的有效结合,帮助学生透彻理解反馈控制思想和PID控制的原理,提高学生分析和解决问题的实践能力,并有利于培养学生的团队合作精神。
关键词:项目驱动教学;自动控制理论;转向控制系统
中图分类号:G642.3 文献标识码:A 文章编号:1002-4107(2018)06-0031-02
高校理工科专业的教学模式一般以教师授课为主,在理论结合实际应用和创新能力培养上相对薄弱一些,作为学生一般是被动地接受知识,对知识点的掌握程度,往往依赖学生自身的理解能力和所下功夫,特别是理论性相对较强的学科,如果授课模式相对单一,所举案例又与实际应用存在一定差距,就会加大学生对理论知识的理解难度,出现缺乏学习兴趣的情况,会影响到教学质量,造成学生在基础学科上掌握不够牢固,还会影响到后续学科的学习,甚至衍变成应试教育[1]。专业基础课不仅仅是专业课程学习的基础,它与工程实践应用也结合得较为紧密,如果能够在教学中实现与实际应用的有机结合,让学生提高学习兴趣,加深理解,就会产生更好的教学效果[2]。针对这种情况,笔者在“自动控制理论”课程中尝试开展了“项目驱动教学”模式的探索和实践,把它作为传统课堂授课的有机补充,通过两年多的摸索、研究和实践,取得了不错的教学效果。
一、项目驱动教学综述
项目驱动教学相对于传统课堂授课模式,是一种行为引导式的教学方式[3]。在教学过程中,教师针对所教授的课程内容,选取合适的项目或案例作为教学载体和教学主轴,把学生所需掌握的知识点融入到项目的各个环节中,组织学生成为项目的实施主体,授课教师总体把控和引导项目的开展,并围绕项目开展实施教学活动。学生参与项目分析、方案制定、软硬件设计、调试试验的整个过程,这样就可以在课堂教学中将理论与实践有机结合,学生的学习过程也不再是被动接受,而是需要积极参与。为了完成既定目标,在项目实施过程中,学生需要开动脑筋发现问题,并找出解决问题的思路和方法,在项目进展过程中,熟悉和掌握项目中所蕴含的各种知识点,并且能够让学生体验到成功解决问题后的成就感,对提高学生的学习兴趣和积极性有着正面的促进作用。在提高学生动手实践能力的同时,也培养和增强了学生行动自信力和团队合作精神[4]。
项目驱动教学有别于传统课堂授课教学模式,有着相对生动灵活、不拘多样的特点,教师可以针对课程内容及知识构成特点,灵活机动地选取适宜项目或案例开展教学活动,与课堂的理论授课有机融合施教,并通过教学实践逐步积累、修订和完善,并最终纳入学科教学大纲中。
二、“自动控制理论”课程项目驱动教学法实例应用
“自动控制原理”课程主要教授控制系统分析与设计的基础知识,包括控制系统建模、控制系统的稳定性、稳态性能和动态性能以及控制系统校正与设计等。通过本课程的学习,主要使学生了解并掌握分析和设计自动控制系统的基本理论知识和方法,并能够较熟悉使用Matlab等软件进行系统设计仿真与计算,为后续相关课程的学习奠定基础。
(一)项目驱动教学目标
“自动控制原理”是电气工程及其自动化专业的专业必修课,其理论性知识点较多,且概念较抽象,但该课程实际上与工程应用联系较为紧密,且是后续专业课学习的一门重要基础科目。多年来,该课程一般采用“课堂教授+验证性实验”的教学方法[5],学生即使掌握了本课程要求的基本概念、基本数据等,也较难将课堂所讲的理论知识与工程实际相联系,缺乏用控制理论来解决实际问题的应用。
基于以上情况,选择“自动控制原理”课程来实施项目驱动教学模式的探索和实践。针对“自动控制原理”课程中的控制系统数学模型建立、控制系统的校正与设计等方面的重要知识点,选取一个或多个合适项目或案
例,通过系统分析、软硬件设计、Matlab软件仿真等,使学生更好地掌握相关知识点。
在项目实施过程中,将学生分成几个项目小组同步开展,并推选项目小组长负责本小组课题活动。学生可通过查找文献、上网搜索等不同的方式来搜集相关资料,教师对重要知识点和关键过程进行讲解和引导,并
随时掌握各小组的进展情况。
(二)项目概要及要求
针对“自动控制原理”课程教学目标,在此以“车轮转向PID控制系统”为例,简要介绍项目驱动教学方法。
车轮转向控制在工业领域应用非常广泛,由于其具有工况复杂、参数多变、运行惯性大、控制滞后等特点,它对控制调节器要求较高。因此该项目能体现自动控制理论的教学目标,并提高了学生的工程实践能力和综合素质。
为了达到好的转向效果,应对电机有一个良好的转向驱动方式。转向给定值由人工设定,控制器根据步进电机转角的变化自动调整转向。为此结合控制要求,设计技术参数确定为:
1.电机步进角为1.5度,转角都保持在[-90°,+90°]变化。
2.空载起动到额定转向时的转向超调量n≤10%。
3.根据不同的路况能自
动调整目标转向。
(三)项目总体分析及控制器方案确定
对车轮转向PID控制系统设计要求进行分析,建立系统组成控制框图,确定系统硬件结构,并确定PID控制器方案。通过本部分的实施,可以培养学生系统分析和PID控制器设计能力。
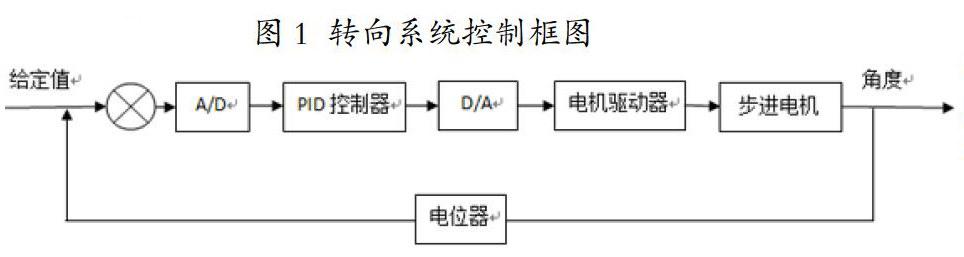
教师引导学生,对车轮转向驱动系统进行分析,建立驱动系统的控制框圖,如图1所示。整个控制系统为Arduino作为控制处理器;通过电位器检测转向角,电位器信号通过A/D进入处理器,与设定的目标值比较得到误差;误差作为输入经过数字PID运算得到控制量,该控制量通过D/A输出给步进电机驱动器,通过电机驱动车轮转向,从而达到设定的目标值。
为了使学生更加直观地了解控制系统的组成和原理,控制系统采用简单易学的Arduino实现,学生可以在较短时间内完成系统的搭建。
图1 转向系统控制框图
(四)项目软硬件设计
确定系统硬件结构后,接下来设计系统的软件和硬件部分。每个项目小组按照项目的内容和成员的特长进行分工,明确每个成员的职责和任务。硬件电路的设计主要有:1.电气电路的设计,主要完成主电路和驱动控制器;2.转角测量电路设计,选择电位器将检测反馈回的信号进行A/D转换;3.转向PID调节器设计,实现转向自动控制;4.电源管理设计,主要完成向Arduino控制器和电机驱动模块提供控制电压。根据以上组成部分的特点及要求,结合学生对系统的理解程度,画出相应的电路图,最后把各部分的硬件电路整合起来。
车轮转向PID控制系统采用Arduino进行数字转向控制,数字PID调节器等直接用程序实现控制,这些环节可以由不同的学生独立编程完成。各环节程序完成后,再设计系统的主程序和中断程序,这部分内容由大家集体完成。
(五)项目调试、仿真及运行
对车轮转向PID控制系统进行系统调试,并通过Matlab软件建模进行仿真实验,得到优化PID控制器参数,最后进行在线运行控制。通过本部分的实施,培养了学生数学模型建立、Matlab仿真和系统调试的能力。
1.系统调试。系统硬件装配完之后,先对系统进行硬件调试,接下来进行联机调试,在调试过程中,不仅要检查硬件问题,还要检查软件问题。在检查硬件没有问题后,再结合硬件修改软件程序,逐步检查问题,直到调试出结果。这个过程需要小组成员的协作,共同完成。
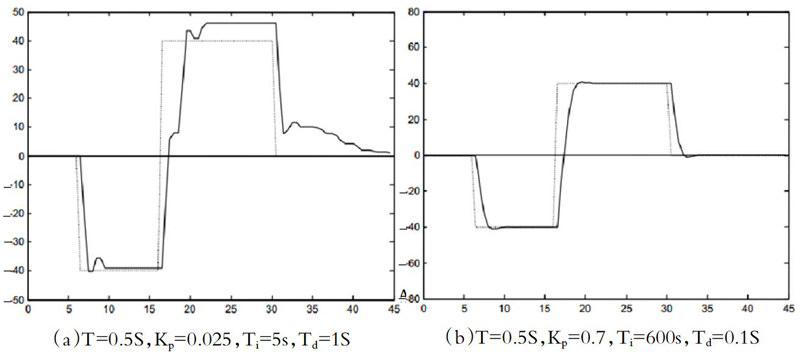
2.建模及仿真。系统调试成功后,对车轮转向驱动系统施加不同的输入控制信号,可得到转向的输出信号,从而对车轮进行数学模型建立,得到控制系统传递函数。根据得到的传递函数,运用Matlab仿真软件进行仿真实验,得到PID控制器的参数。
图2是PID参数设定后运行性能比较,电位器转向角度数据的仿真实验,T=0.5S,KP=0.7,Ti=600s,Td=0.1S时,控制效果比较好。
3.运行及校验。在程序中给定车轮的期望转向角
度,将仿真结果得到的PID控制器参数写入程序中,在线对系统进行控制。通过观察Arduino监视器的车轮转向结果,确定控制的效果是否达到要求。如果没有达到,或者性能指标不好,分析原因,并找出解决方法。
(六)项目总结研讨及答疑讲解
各小组完成项目后要提交总结报告,授课教师组织各小组全体学生开展本次项目驱动教学的总结研讨活动,活动内容主要包括:各小组代表做项目汇报及项目成果展示;各小组总结项目实施过程中遇到的关键问题及解决方案;授课教师针对疑难问题、知识点进行归纳总结和讲解;教师学生一起对项目驱动教学模式进行共同研讨,提出改进意见及建议;授课老师对本次项目驱动教学活动进行总结等。
三、结语
作为课堂教学的有机补充,从项目驱动教学在“自动控制理论”课程中的试点实践应用结果来看,可有效激发学生的学习兴趣,加强学生学习的主观能动性,增
强理论与实际应用结合的体验,有利于加深学生对理论知识的理解,同时培养学生项目组织、团队协作及工程实践能力。
参考文献:
[1]楼旭阳.实例式教学在自动控制原理教学中的运用和研究[J].价值工程,2016,(13).
[2]杨晓红,徐亮,刘成旭,等.《自动控制原理》课程工程实例法教学改革[J].教育教学论坛,2016,(36).
[3]任金霞,王祖麟.项目驱动教学在“自动控制原理”课程中的实践[J].中国电力教育,2013,(28).
[4]杨艳丽,郭一锋,张国良,等.问题驱动教学法在《自动控制原理》“稳态误差分析”教學中的应用[J].教育教学论坛,2016,(17).
[5]刘臣辉,徐青,郑天柱,等.项目驱动教学模式在实践性教学中的应用研究[J]. 科教文汇:上旬刊,2015,(3).
