无人机航摄RTK技术在园林规划中的应用
2018-07-18 02:19胡永进曹仁勇
江苏农业科学 2018年12期
胡永进,曹仁勇
(江苏农林职业技术学院,江苏句容 212400)
在传统的园林规划设计时,需要对现状地形地物采取实地查看或采用GPS、全站仪等设备进行全野外实地测量,测制 1 ∶500 大比例尺地形图(DLG)、正射影像图件(DOM)。传统技术方法,存在片面了解现状地形地物、无法更加清晰地进行规划设计、绘制的效果图不符合实际等问题[1]。随着科学技术的不断进步、无人机行业的不断发展,地理信息实景化、三维化的信息化需求逐步提高。无人机在农业、航拍、基建、巡检、警用和消防领域的应用不断扩展,其相对投资少、工作量小、工作周期短等特点受到规划院和设计院青睐[2]。
在风景园林系统规划应用方面,系统规划的工作范围大,工作强度高,并且需要规划师对周边情况有清晰、明确的了解与定位[3]。无人机航拍技术则可以将这些情况清晰、准确地表达在三维和二维图像上,明显缩短了工作周期和工作量。在新的无人机航测遥感技术体系下,采用高精度定位RTK系统辅助1 ∶500大比例尺成图,定位精度更高,图像处理更加容易,成为了园林规划领域新的技术方法。
1 无人机航摄RTK测图技术原理
1.1 无人机航摄RTK作业原理
无人机的飞行航线可以根据导航定位系统所得到的信息让无人机在指定的时间内完成航行任务,而其精准度与所搭载的定位技术直接挂钩。采用基于RTK(Real-time kinematic)载波相位差分技术的无人机定位系统,可以通过实时获取导航卫星信号和RTK差分定位信息,通过地面GPS基站来提高卫星信号对大气层的定位精度,将偏移量控制在厘米级[4]。
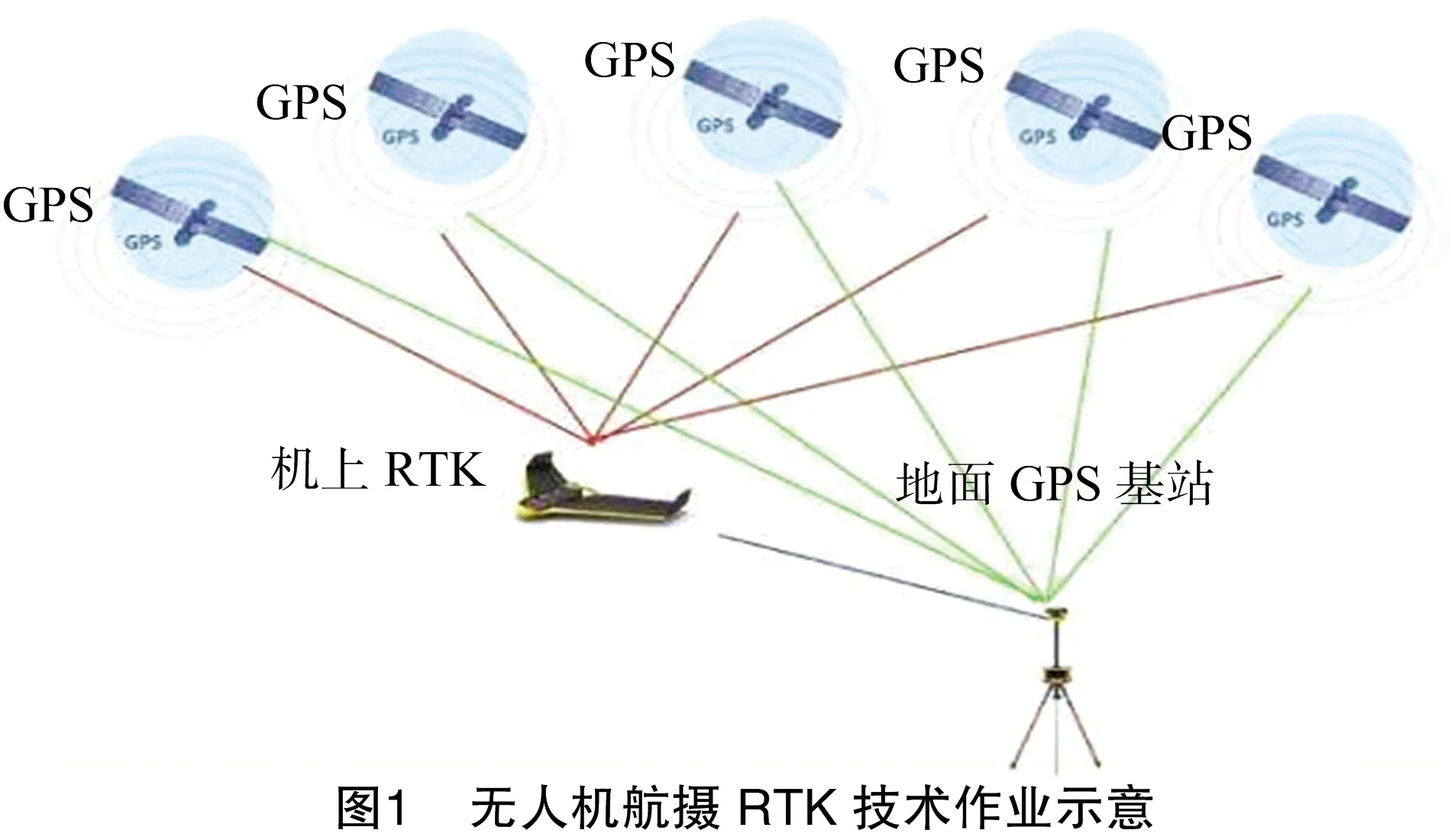
无人机航摄RTK技术是指采用内置的小型机载GPS板卡的无人机航摄遥感系统,机载RTK和地面GPS基站以一定采用频率同时记录当前的位置,通过差分解算、内插处理等,获得无人机相机拍摄的每张相片在曝光时刻的精确地理位置坐标,实现为无人机飞行作业提供高精度定位支持,从而获得的各项航摄指标,如重叠度、旋偏角度等更加符合《低空数字航空摄影规范》要求。具体无人机航摄RTK技术作业见图1。
1.2 RTK辅助测图技术原理
高质量的航摄影像及高精度的曝光点坐标是1 ∶500大比例尺测图的技术前提。传统的无人机大比例尺测图技术,由于采用小相幅非量测相机进行拍摄,以致空三解算需要更多控制点来保证精度,大大增加了外业工作量;而采用GPS RTK辅助测图技术,则利用RTK实时获取的无人机航摄曝光点坐标,作为辅助数据参加光束法联合平差处理,以达到利用GPS RTK摄站作为空中控制来取代传统测图大量地面控制点的目的,从而使测区所需的地面控制点大大减少[5]。
具体原理如下:
(1)
(2)
式中:[XS,YS,ZS]为实际曝光时刻投影中心坐标;[x,y,-f]为像点在像空间坐标系下的坐标值;[X,Y,Z]为像点在像空间辅助坐标系下的坐标位置;[X,Y,Z]GPS为相机曝光时刻记录的摄站点GSP坐标位置;[x,y,z]GPS为GPS天线相位中心在像空间坐标系下的坐标值;[aX,aY,aZ]和[bX,bY,bZ]分别为GPS线性偏移系统误差改正参数中固定部分和随时间变化部分;t表示该曝光点的曝光时刻,t0为参考时刻。
1.3 地面基站架设要求
大量工程实践表明,进行诸如1 ∶500的大比例尺测图,需要在测区范围内架设地面基站,从而获得更加稳定的卫星信号、更高精度的航摄定位精度。在架设地面基站时,需要注意以下事项:(1)基站的设置及作业半径对RTK的测量精度和作业速度有直接影响。基准站应尽量架设在地势较高的地方,而且要远离强电磁干扰源和大面积的信号反射物。(2)RTK技术本身是依赖于GPS卫星定位的,它的使用要有4颗以上卫星相位观测值的跟踪和必要的几何图形,如果所在地本身接受GPS的信号就很差,那RTK也没有什么作用。另外在有大面积信号反射物的地方是无法定位的,如高层建筑附近、茂密的森林等;强电磁源也会干扰信号,如高压输电线附近、变电站等,在云层较厚的时候也有影响。
2 试验方法与试验结果
2.1 采用无人机航摄系统
本次项目试验采用了天狼星无人机RTK航测遥感系统,该系统搭载着拓普康GNSS接收机,采样频率高达100 Hz,可实现100 Hz RTK数据更新。经生产实践,该系统平面精度可达5 cm,高程精度达10 cm,可以满足1 ∶500~1 ∶2 000测图要求[6]。具体天狼星无人机RTK航测遥感系统平台构成见图2。
2.2 试验区概况
为了测试该无人机航测遥感系统能否达到园林规划设计中平面、高程精度,本试验选取了江苏农林职业技术学院主校区,范围约0.4 km2,长800 m,宽500 m,校区以教学楼、操场、空地为主,地形平坦(图3),于2017年5月采用天狼星无人机航测遥感系统对试验区进行了低空航摄数据采集,起飞共1架次。因采用了天狼星无人机RTK航测遥感系统,可以实现少控制测图,本项目在测区内一个已知点上架设了基站,用于坐标系统转换,未另测像控点。

2.3 航摄计划创建与参数设定
考虑到测区地形平坦,实地工作环境温度最高25 ℃,风力最大4级。根据园林设计1 ∶500地图需求,同时为保证无人机安全航飞,设定参数为:地面采样间隔5 cm,飞行航高约200 m,采用MA Vinci Desktop程序下进行航线设计、航飞监控,航飞带宽为300 m。
航飞拍摄的影像数据见图4,影像清晰,细节清楚,色彩饱和,影像分辨率达到了5 cm。
2.4 无人机航摄系统测制大比例尺地形图
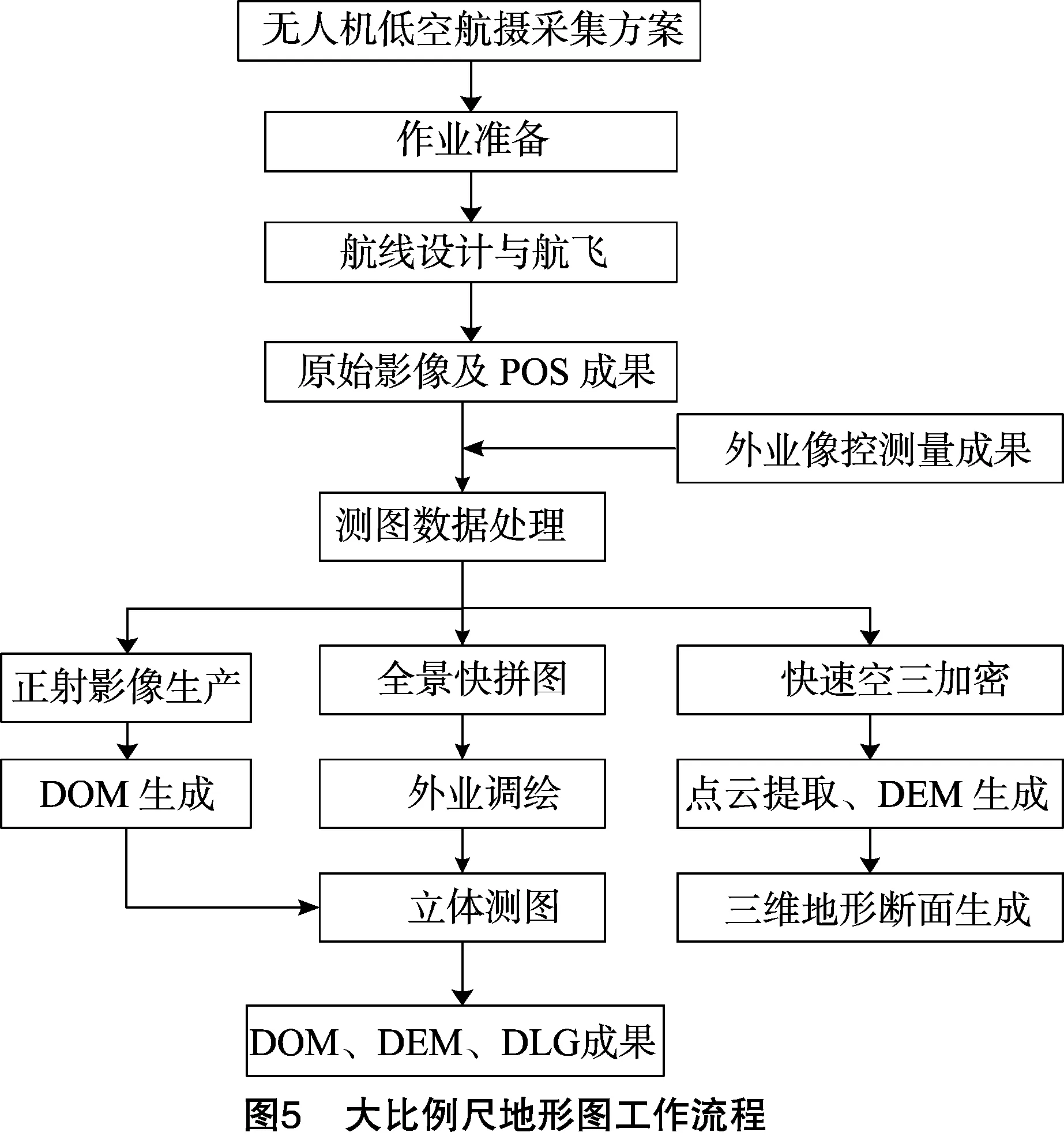
待航摄影像飞行完,经地面检查无质量问题,利用天狼星无人机航测遥感系统配套的AgiSoft PhotoScan Pro程序进行快速空三,直接生产DOM、DEM数据,然后转到立体测图工序。区别于传统的立体测图技术,此次试验采用了EPS软件进行裸视三维立测,便于学院推广使用。
无人机航摄系统测制大比例尺地形图工作流程见图5。
2.5 试验数据精度分析
本项目实测数据采用GPS RTK方式进行采集,对于 1 ∶500 无人机大比例尺测图而言,平面精度相对容易达到,而高程按航测规范需达到1 ∶500测图精度对于一般主流无人机航摄系统高程精度很难保证,因此本次精度分析更加侧重在硬化路面、操场等平地的平面高程进行精度验证,布设了27个外业检查点和DOM成果数据套合检查分布见图6。

此次试验27个检查点平面、高程精度较差(表1)。

表1 测区平面、高程精度分析
其中,平面差值最大为0.15 m,平均中误差为0.05 m;高程差值最大为0.12 m,平均高程中误差为0.08 m。综合评价无人机航摄高程精度约为2×GSD,可以实现10 cm的高程精度。
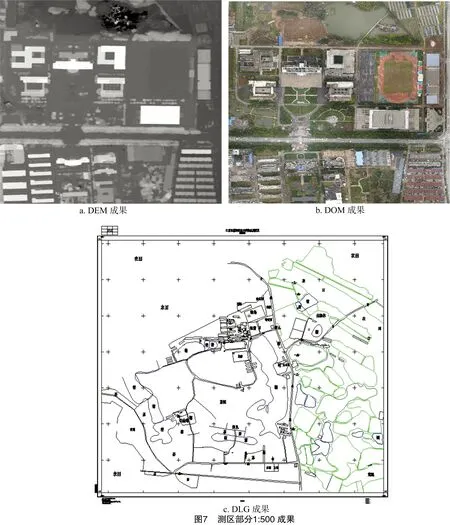
根据CH/Z 3005—2010《低空数字航空摄影规范》[7]对平地地形的1 ∶500测图产品的精度要求,平面中误差为 0.3 m,高程中误差为0.2 m,通过精度统计分析,本次试验精度完全可满足我国1 ∶500成图3D产品要求。具体测图成果见图7。
3 结论与展望
从试验和分析可以看出,采用机上实时RTK辅助测图可以满足1 ∶500大比例尺测图精度要求。采用基于无人机航摄遥感系统平台的机上实时RTK技术可以实现小范围的地形测绘,大大减少野外像控点数量,缩短成图周期,降低作业成本。随着无人机行业的不断发展,无人机在农业、航拍、基建、巡检、警用和消防领域的应用不断扩展,伴随着国家空域主管部门对中低空无人机航空试点的逐步放开,小型化的无人机航空摄影测量,采用机上实时RTK技术为无人机提供了新的高精度定位系统,可为园林规划设计、用图提供新的技术手段,应用前景广阔。
猜你喜欢
当代陕西(2020年23期)2021-01-07
中华建设(2019年2期)2019-08-01
现代园艺(2017年22期)2018-01-19
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
全球定位系统(2015年4期)2015-02-28
发明与创新(2015年29期)2015-02-27
浙江国土资源(2014年5期)2014-04-28
河南科技(2014年12期)2014-02-27