
参数模型的预检验几乎无偏两参数估计
2018-07-12 08:35:56常新锋王和祥左秀霞
统计与决策 2018年12期
常新锋,王和祥,左秀霞
(江苏大学 财经学院,江苏 镇江 212013)
0 引言
考虑参数模型:

其中,y是n×1的观测向量,X是n×p的观测矩阵,β是p×1的未知参数向量,ε是n×1的随机误差向量,ε~N(0,σ2I),σ2>0。
模型(1)中β的附加信息为以下等式约束:

其中r为q×1的已知向量,R为q×p的矩阵,且q<p。
对于模型(1),当不能确定等式约束条件式(2)是否成立时,考虑假设检验:H0:r=Rβ,H1:r≠Rβ。关于以上问题,其对应的似然比检验统计量为C=X′X,δ=Rβ-r。当H1成立时,统计量F为自由度为(q,n-p)的非中心F分布,非中心参数为(1 2)Δ,其中
对带等式约束条件的参数模型(1),Judge和Bock[1]提出了基于F检验的预检验估计。考虑模型存在复共线性的情况,Saleh和Kibria[2]提出了基于F检验的预检验岭估计。Yuksel和Akdeniz[3]得到了基于F检验的预检验Liu估计。Kibria和 Saleh[4],Saleh[5],Yang 和 Xu[6]等对各类预检验估计的统计性质进行了分析。Chang和Yang[7]提出了在t分布下基于W、LR和LM检验的预检验两参数估计。本文在Wu和Yang[8]提出的几乎无偏两参数估计的基础上,结合预检验估计的思想,提出了预检验几乎无偏两参数估计,并在均方误差准则下对估计的统计性质做了研究。
1 估计的提出
为了解决参数模型(1)中的复共线性问题,Wu和Yang[8]提出了几乎无偏两参数估计,其表达式为:

结合Kaciranlar等[9]得到约束最小二乘估计的方法,本文提出如下的约束几乎无偏两参数估计:

当不能确定等式约束条件式(2)是否成立时,本文得到基于F检验的预检验几乎无偏两参数估计

其中I(A)为事件A的示性函数,Fα表示自由度为(q,n-p)的中心F分布的上α分位数。
2 估计的性质
2.1 估计的均方误差值为Δ的函数
引理1[10]:设矩阵A,B均为n×n的实对称阵,且B为正定矩阵,对任意n×1的非零向量x,有≤λ1(AB-1)成立,其中λ1(AB-1)和λn(AB-1)分别表示矩阵AB-1的最大特征值和最小特征值。
定理1:在均方误差准则下,令k>0和0<d<1不变,
证明:β̂AUTPE(k,d)的均方误差为:

故MSE(β̂AUTPE(k,d))-MSE(β̂PTAUTPE(k,d))≥ 0 当且仅当:

根据引理 1,得σ2Δλp(Ak,dAk,dC-1)≤η′Ak,dAk,dη≤σ2Δλ1(Ak,dAk,dC-1) 。 其 中 Δ=σ-2η′Cη,λ1(Ak,dAk,dC-1) ,λp(Ak,dAk,dC-1)分别表示矩阵Ak,dAk,dC-1的最大特征值和最小特征值。因此MSE(β̂PTAUTPE(k,d))≤MSE(β̂AUTPE(k,d))成立的一个充分条件为Δ≤Δ1,其中:

MS成立的一个充分条件为Δ≥Δ2,其中:

定理2:在均方误差准则下,令k>0和0<d<1不变,当当


故MSE(β̂RAUTPE(k,d))-MSE(β̂PTAUTPE(k,d))≥ 0 当 且仅当:


M成立的一个充分条件为Δ≤Δ4,其中:

2.2 估计的均方误差值为参数k和d的函数
另矩阵P为正交矩阵,且满足其中λ1≥…≥λp>0为矩阵C的顺序特征根。则式(9)和式(12)分别记为:
定理3:
(1)在均方误差准则下,令 Δ>0和 0<d<1固定,h1i>0 ,当 0<k<k1时,MSE(k,d))≤(k,d)) ;当k>k2时 ,(k,d))。
(2)在均方误差准则下,对Δ>0和k>0固定,h2i>0 ,当d1<d<1 时,d));当 0<d<d2时,d))。
(1)令 0<d<1固定,f1(k,l)为参数k的函数,则若h1i>0,此时关于参数k的一元二次函数f1(k,l)开口向下,其一正根为:

由于k=0 时,f1(0,l)=λi>0 ,对任意的 0<k<k1,k1=min{k1i} ,有f1(k,l)≥0 ,故MSE(β̂PTAUTPE(k,d))≤MSE对任意的≤0 ,故
(2)令k>0固定,f1(k,l)为参数l的函数,则当h2i>0时,关于参数l的一元二次函数f1(k,l)开口向下,其一正根为,对 任 意 的 0<l<l1i,有f1(k,l)>0 。 而l=1-d,对任意的,有对 任 意 的有f1(k,d)≤ 0 ,故
定理4:
(1)在均方误差准则下,令 Δ>0和 0<d<1固定,h3i> 0 ,当k>k3时,d));当 0<k<k4时,d))。
(2)在均方误差准则下,令 Δ>0和k>0固定,h4i>0 ,当 0<d<d3时,(k,d));当d4<d<1时,(k,d))。
(1)令0<d<1固定,f2(k,l)作为k的函数,则:
f2(k,l)=h3ik2+f͂3i(2k+λi)
若h3i>0,此时关于k的一元二次函数f2(k,l)开口向上,其一正根为:
其中
由于k=0 时,对任意的k>k3,k3=max{k2i},有f2(k,l)≥0 ,故对 任 意 的 0<k<k4,k4=min{k2i} ,有f2(k,l)≤ 0 ,故
(2)令k>0固定,f2(k,l)为l的函数,则:
当h4i>0时,关于l的一元二次函数f2(k,l)开口向上 ,其 一 正 根 为对 任 意 的l>l2i,有f2(k,l)>0。而l=1-d,对任意的对任意的0 ,故MSE
3 模拟分析
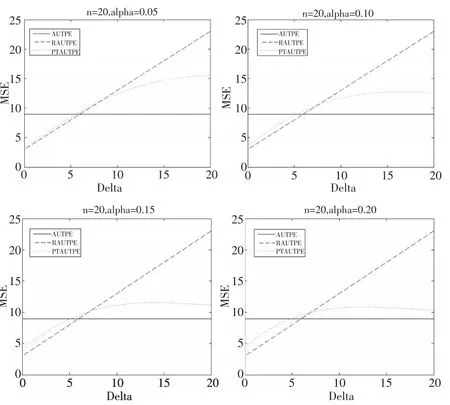
图1 k=0.2和d=0.8时各估计在不同显著水平下的均方误差
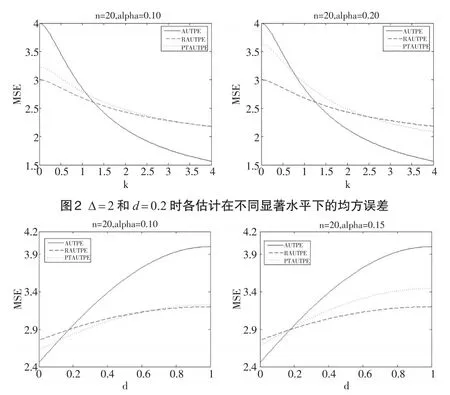
图3 Δ=2和k=0.9时各估计在不同显著水平下的均方误差
从图1发现,对于不同的α,β̂PTAUTPE(k,d),β̂RAUTPE(k,d)和β̂AUTPE(k,d)的均方误差都随着参数 Δ 的变大而增大。当Δ取值接近于0时,估计β̂RAUTPE(k,d)的均方误差值小于估计β̂PTAUTPE(k,d)的值,同时估计β̂PTAUTPE(k,d)均方误差值小于估计β̂AUTPE(k,d)。随Δ值变大,估计β̂PTAUTPE(k,d),β̂RAUTPE(k,d)和β̂AUTPE(k,d)的均方误差值的大小关系与上述情况相反。图1中的均方误差值变化情况验证了定理1和定理2。
从图2看出,对于不同的α,β̂PTAUTPE(k,d),β̂RAUTPE(k,d)和β̂AUTPE(k,d)的均方误差都随着参数k的变大而减小。当k取较小值时,β̂RAUTPE(k,d)的均方误差值小于β̂PTAUTPE(k,d)的值,同时β̂PTAUTPE(k,d)均方误差值小于β̂AUTPE(k,d)。 随着参数k值变大,估计β̂PTAUTPE(k,d),β̂RAUTPE(k,d)和β̂AUTPE(k,d)的均方误差值与上述情况相反。从图3看出,对于不同的α,β̂PTAUTPE(k,d),β̂RAUTPE(k,d)和β̂AUTPE(k,d)的均方误差都随着参数d的变大而变大。当d取值较小时,β̂AUTPE(k,d)的均方误差值小于β̂PTAUTPE(k,d)的值,同时β̂PTAUTPE(k,d)均方误差值小于β̂RAUTPE(k,d)。随着参数d值变大,估计β̂PTAUTPE(k,d),β̂RAUTPE(k,d)和β̂AUTPE(k,d)的均方误差值与上述情况相反。图2和图3中的均方误差值变化情况验证了定理3和定理4。
4 总结
本文结合几乎无偏两参数估计和预检验估计,提出了参数模型的预检验几乎无偏两参数估计。在均方误差准则下,分别给出了预检验几乎无偏两参数估计优于几乎无偏两参数估计、约束几乎无偏两参数估计的充分条件。通过数据模拟分析,验证了上述理论结果。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:07:30
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
今日中国·法文版(2020年7期)2020-07-04 02:53:48
数学物理学报(2020年1期)2020-04-21 06:00:54
统计与决策(2017年2期)2017-03-20 15:25:22
数学物理学报(2016年5期)2016-08-24 07:38:48
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
系统工程与电子技术(2016年2期)2016-04-16 05:17:08
电力建设(2015年2期)2015-07-12 14:15:59
浙江共产党员(2015年11期)2015-05-23 12:05:41
