
GNSS智能相干跟踪欺骗干扰方法及效能分析研究
2018-07-10 12:43张佩华吕红丽
现代导航 2018年3期
张佩华,吕红丽
(1 中国电子科技集团公司第二十研究所,西安 710068;2 陕西省组合与智能导航重点实验室,西安 710068)
0 引言
各大媒体报道,2018年1月5日至6日夜间叙利亚恐怖分子无人机袭击了俄空、海军基地,被俄空军“海雕-10”电子战无人机俘获,该报道让大家再次想起2011年12月4日美RQ-170无人机被伊朗被诱捕事件,这种电子对抗战中的电子压制也再次激发大家对GPS欺骗式诱骗干扰的种种神秘猜想,借此话题,相关专业人事相继开展了不同的 GNS欺骗干扰方法及其效能分析研究。
GPS信号脆弱,易受到各种恶意和无意的干扰。而在对GPS的各种恶意干扰中,欺骗干扰因其不易被发现,隐蔽性好的特点受到各国专家及军事部门的重视,逐渐成为GPS干扰的重要手段。欺骗信号相对于压制干扰信号来说更具威胁,因为其在使受欺骗目标产生错误定位的同时不会引起被欺骗目标的察觉,且信号播发功率远低于压制干扰,易于实现,设备成本低。
1 欺骗式干扰方法
通常,欺骗式干扰方法被分为“产生式”和“转发式”两种。
“产生式”欺骗干扰是根据侦察得到的扩频伪随机码结构,产生与其相关性最大的伪随机码,然后调制与导航电文格式完全相同的假导航电文,修改了某些星历、时钟等数据,使接收方上当,但需要知道真实卫星信号的扩频码型以及当时卫星电文数据,对加密的军码干扰很难实现。对GPS军码接收机,以实时估计GPS卫星导航军用加密W码为基础的欺骗干扰,由于它可以以非常小的功率实现对军用接收机的有效干扰,因而可用于星载、气球载及飞机载的干扰系统中,从而实现对军用信号的大范围干扰,如图1所示。

图1 卫星产生式干扰示意图
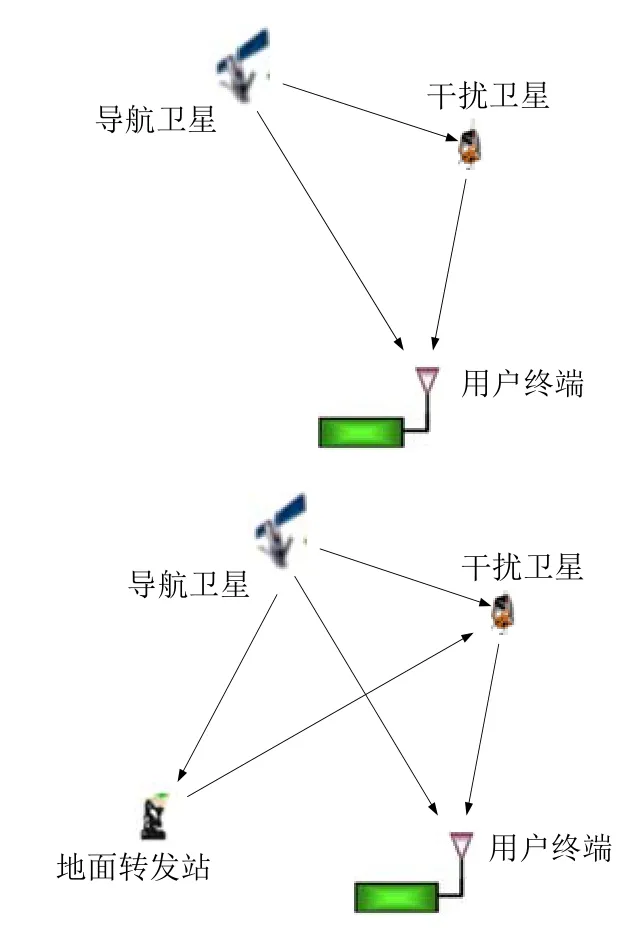
图2 直接转发式和间接转发式干扰示意图
“转发式”干扰是利用信号的自然延时,将干扰机接收到的卫星导航信号,经过一定的延时放大后直接发送出去。对于某一台卫星导航接收机来说,同时存在多个信号,接收机很容易被这种信号欺骗,从而得到错误的伪距,影响定位精度。“转发式”欺骗干扰利用信号的自然时延容易实现,但要解决转发后信号的“保真”问题。涉及到载波波段微弱信号的接收、处理、匹配和放大等,要尽量减小信号的畸变,提高输出信噪比。另外,关键在于解决收发隔离问题,而这种收发隔离需要的代价是多波束指向天线接收和不同卫星信号的不同时延播发策略及控制机制。其转发模式包含直接转发和间接转发两种,如图2所示。
从可实现性出发,经对各种抗干扰措施后军用GPS接收机的干扰应以转发式欺骗干扰为主,辅以相关压制干扰。首先用相关码压制干扰发射一个很短的时间,让干扰区域内的GPS接收机转入搜索状态,然后切换到转发式欺骗干扰上,使要干扰的GPS接收机锁定到欺骗信号上,过一段时间,再重复这个过程。采用这种组合方式,可以较好的发挥压制干扰和欺骗干扰的作用,达到好的干扰效果,技术上相对较易实现。
与压制干扰布阵对比,欺骗式干扰机发射的欺骗干扰信号淹没在热噪声信号下,功率小,覆盖范围大,隐蔽性强,不受升空高度和平台的限制,很难被敌方发现而被击毁,又能使敌方的抗干扰设备(自适应调零天线、抗干扰数字滤波器以及干扰源探测器等)失效,因此欺骗式干扰网络系统是重要目标防空最为有效措施,受到各军种部队的特殊关注和需求。
2 智能相干跟踪欺骗干扰
随着技术的进步,卫星导航接收机欺骗干扰攻击方式的发展,已从简单模拟信号的欺骗干扰发展到便携式的软件无线电中级欺骗干扰,再发展到一致性好的多相位锁定的高级欺骗式干扰,从而使欺骗具有一定的动态性,干扰机既可以通过其位置的变化、速度的变化对欺骗信息进行调整,又可以随着被干扰目标进行动态调整,使被干扰目标接收机无法识别,这种动态跟踪目标实施不同策略的欺骗信号播发这里定义为智能相干跟踪欺骗干扰。
正常应用中,当GNSS接收机处于信号跟踪模式时,主要是跟踪真实信号的相关峰值。在这种情况下,若接收机解扩环路的跟踪点不位于真实的相关峰值点上,而是接近峰值点,是不会影响接收机的跟踪过程和信号解调的,只是跟踪精度下降问题。因此,一个智能的欺骗干扰机在不破坏GNSS接收机跟踪状态下误导其跟踪环路,应先将其播发信号的相关峰值对齐到真实卫星信号的相关峰值上,然后抬起相关跟踪点控制其跟踪环路。换句话说,欺骗干扰机首先采用与真实信号相同的码延迟和多普勒频移,使其产生的欺骗相关峰与真实信号的相关峰基本一致,然后尝试通过逐渐偏离真实信号的相关峰来误导接收机的跟踪点,以实现对接收机跟踪环路的诱骗跟踪控制。若成功完成一次欺骗剥离控制,需在欺骗与真实信号相互作用时,欺骗干扰机产生的相关峰值应该具备比真实信号更高的功率电平,这种剥离过程通常分为同步和异步剥离两种方法。
同步剥离方法是采用与真实信号相同的多普勒和码延迟产生相对低功率的欺骗相关峰,且相位对准真实信号相关峰,见图3(a)所示的T1时刻状态,欺骗信号功率逐渐增加并超过真实信号的功率电平,进入到状态T2时刻,然后高功率欺骗信号控制其相关峰值逐渐远离真实信号的相关峰值,到达状态T3时空,最后欺骗功率回到真实信号正常功率电平状态T4时刻,实现欺骗干扰的同步剥离,有效地误导 GNSS接收机的环路跟踪点。但采用该方法,欺骗干扰机需要获得其发射天线指向目标接收机天线的三维坐标指向矢量,且精度需要达到几厘米,才能将载波相位对准真实信号,产生同步智能跟踪欺骗攻击信号。另外,欺骗干扰机还应获得被干扰目标接收机接收的真实卫星信号功率,这在实际应用场景中很难实现。

图3 智能跟踪欺骗的两个欺骗攻击方法
异步剥离方法是在欺骗干扰机大致知道被干扰目标接收机的天线位置和欺骗干扰机与被欺骗目标接收机天线之间的信道条件,采用高于真实信号功率的欺骗信号产生欺骗相关峰,见图3(b)所示的T1时刻状态,逐渐向真实信号相关峰值移动,并试图控制被欺骗目标接收机的跟踪点,见T2时刻,然后再逐渐偏离真实信号相关峰点,进入 T3和 T4时刻,实现对被欺骗接收机跟踪环路的诱导控制,完成异步剥离。该方法在实施过程中,欺骗干扰机不需要知道真实信号与欺骗信号之间的准确载波相位差,与同步剥离方法相比,更接近真实场景使用条件。
通过上述分析研究,再次回到前面提到的俄军“海雕-10”电子战无人机俘获敌方作战无人机和美RQ-170“哨兵”无人机被诱捕事件,采用上述手段,需要知道被欺骗的目标用户的初步位置不是难题,采用现有的雷达探测技术就能实现。同时,只要切断无人机的测控链路,使无人机不再获得指挥部的操控指令,通过智能相干跟踪欺骗干扰,使无人机的GNSS接收机跟踪环路在无知觉的情况下逐渐跟踪到欺骗信号上,指引被欺骗无人机按照诱导路径飞行,错误定位,逐渐偏离航线,直至被欺骗目标诱骗到指定位置。
3 欺骗干扰对接收机的影响分析
通常,GPS C/A码接收机天线口面的真实卫星信号)(tSA表示为:

SA(t)对应的欺骗干扰信号Ss(t)可表示为:

这样,GPS C/A码接收机天线口面的输入信号为:

其中,n(t)为热噪声。
若忽略GPS C/A码接收机天线和射频的影响,接收机信号(tR)的中频采样表示为:

其中,i为第i个伪码序列上的采样点,上标A和S分别指真假信号。iP和id分别是对应于第i个伪码序列上的信号功率和数据比特。iτ,dif和0,iφ分别是信号的码延迟、多普勒频率和第i个伪码序列的初始相位。Ts是采样区间,是采样的复圆对称零均值白高斯噪声。
在接收机解扩过程中,中频采样信号与本地复制信号进行相干解调处理,再通过低通滤波后相干输出信号用表示:

其中,N为相干积分间隔,skNT是相关器输出的更新时刻。

对于智能相干跟踪欺骗干扰,欺骗攻击存在于第i个伪码序列,则可假设欺骗和真实信号都存在于第i个PRN中,并且假定欺骗和真实信号的码延迟和多普勒频率与本地复制信号的码延迟和多普勒频率非常接近,因此,相关器输出[1]可表示为式(5)。式(5)忽略了数据位和的影响,为相关器低通滤波后的热噪声分量。ΔτA,L,i和别是真实的第i个伪码序列和本地复制伪码序列之间的码延迟、多普勒频率和初始相位差;分别是欺骗信号和本地复制伪码序列之间的码延迟、多普勒频率和初始相位差;为输入信号的自相关函数。
在欺骗攻击过程中,若接收机已经锁定在第 i个真实信号上,则其多普勒频率和码延这样式(5)可简化表示为:

若欺骗干扰机平滑地改变其信号的码延迟和多普勒频率,逐渐靠近被干扰目标接收机的跟踪点,过渡过程中,当欺骗和真实信号的延迟和多普勒差变为零,实现欺骗与真实信号重合,此后,欺骗干扰机提升播发信号幅值,使欺骗峰值开始偏离真实的相关峰值,以代替真实信号成功牵引解扩跟踪环,实施欺骗引诱干扰。
对于大多数GPS C/A码用户接收机,采用三阶动态跟踪环模型,若欺骗和真实信号遵循相同规律,则码延迟、载波相位和多普勒频率的时间变化可表示为:

在没有其他处理损失下,假设参考时间(k=0)瞬间,欺骗和真实信号的相关峰是零点对准,则同时,对于真实卫星信号,其多普勒频率和码延迟的一节导数是相关的,存在:

其中同,RFf为GPS C/A信号播发频率。
若产生的欺骗信号与真实GPS卫星信号一致,同样需遵循式(8)中所表达的码延迟和多普勒模型,基于接收机三阶锁相环系统的动力学性质,是唯一能使欺骗和真实相关峰初始对准和逐步分离的参数,可作为某一欺骗效能评估的关键因素。基于以上分析,式(6)可以近似表示为:


对比式(9)和式(6),两个正弦项已被欺骗和真实信号近似一致所抵消,此时多普勒频率也应彼此非常接近。
式(9)表明,一个智能相干跟踪欺骗干扰的实施过程,主要通过控制以及来实施,当然,在欺骗剥离过程,还应满足接收机三阶锁相环系统的动力学性质,否则就容易被接收机识别或者导致接收机跟踪状态的破坏。
对于一个GNSS卫星导航接收机,码跟踪环采用超早、超晚、早、晚和即时相关器,则相关器输出为:

这样按照图3欺骗攻击方式,在欺骗干扰与真实信号交互期间,四个节段的超早、超晚、早、晚和即时相关器输出见图4所示。
在图4中,A状态为无欺骗的真实信号跟踪,B状态为交互状态,C状态为对准状态,D状态为欺骗牵引状态。
因此,在欺骗攻击过程中,欺骗干扰信号使相关器输出幅度波动超出一定范围,则对真实信号的相关峰形成很大的影响。
另外,通常GNSS卫星与用户接收机之间的多普勒频率为:

其中, f0为卫星信号发射频率,c为光速,vs为用户接收机与卫星相对运动速度。
由于空中各颗GNSS卫星相对于用户接收机的运动速度和运动方向不同,则用户接收机接收真实卫星信号的多普勒频率各不相同。若采用欺骗干扰源同时播发多颗欺骗信号,则GNSS用户接收机收到的多普勒值是相同的,因此智能欺骗攻击过程中,会按照式(11)来改变值来实现智能欺骗攻击。

图4 欺骗干扰机按照图3方式对目标接收机攻击的相关输出幅值变化特性
GNSS欺骗干扰的终极目标是诱使用户接收机的定位结果错误,这种定位错误包含测量距离的改变和导航电文的改变两个方面,而通常测量距离的突变一般较容易被用户接收机识别,所以智能欺骗干扰大多采取测量距离的缓变牵引,见图3的异步攻击牵引,这样测量伪距的缓变会导致定位轨迹缓慢偏移,实现智能相干跟踪欺骗干扰。另一方面,解调的导航电文传递给用户接收机的主要是GNSS卫星自身的位置和时间基准参数改变,一般GNSS接收机没有其他参考手段很难被识别,从而达到欺骗的目的。
4 试验验证情况
(1)仿真验证情况
仿真模拟设置欺骗干扰信号功率比真实卫星信号功率高3dB,用户接收机基带信号处理的码跟踪环采用0.1码片的窄相关处理,开始时相干跟踪欺骗干扰信号与真实信号完全重叠且始终同相。当接收信号跟踪状态进入稳态阶段后,欺骗干扰信号开始对码跟踪环进行牵变,码跟踪环相关器的变化情况如图5所示。

图5 智能相干跟踪欺骗干扰对接收机相关器的影响牵变过程

图6 欺骗干扰攻击模拟场景试验连接图
(2)实际试验验证
在实验室利用双模GNSS(GPS和北斗)模拟源来模拟欺骗干扰场景,连接方法如图6所示。
GNSS模拟源A和GNSS模拟源B在同一时刻分别配置为两个场景,模拟源A配置为真实卫星信号,模拟源B配置为欺骗生成式干扰信号,然后利用模拟器的场景合成软件合成后同时播放,且设置欺骗干扰信号功率高于真实卫星信号3dB以上。
以GPS L1欺骗干扰开展相关试验,试验设置欺骗干扰信号功率高于真实卫星信号功率10dB,采用智能相干跟踪欺骗干扰牵引,牵引过程中,分别使欺骗干扰与真实卫星信号的延迟为0码片(即对齐)、0.6个码片、1个码片、1.4个码片、2个码片、10个码片,其码跟踪环(DLL)和载波跟踪环(PLL)的相关输出如图7所示。

图7 智能相干跟踪欺骗干扰对用户接收机牵引攻击过程的相关输出影响

图8 欺骗干扰攻击下用户接收机的定位轨迹
若设置欺骗干扰使用户接收机从固定位置变为半径为800m的圆周运动场景,即模拟源A对用户接收机设置在圆心固定位置,模拟源B对用户接收机设置为圆周运动(欺骗信号),则被欺骗用户接收机的定位轨迹约为半径800m的圆周曲线,如图8所示。
基于图8的欺骗干扰攻击,若设置部分卫星信号被欺骗后,则用户接收机的定位轨迹变化如图 9所示。
在上述条件下,若用户接收机存在较强的欺骗干扰检测能力,全部剔除欺骗干扰信号,接收机跟踪环路能重新捕获跟踪真实信号,其定位情况如图10所示。
此时分析其定位精度(x,y,z)(1σ)情况分别见图11至图14所示。
5 结论
目前GNSS欺骗干扰机发展的趋势是向待欺骗用户接收机提供一个误导性的信号,诱使用户接收机得到精度下降的,甚至是错误的定位信息,而又没有被用户接收机识别,进而使用户接收机产生错误的导航方案。

图9 部分卫星信号被欺骗后接收机的定位轨迹

图10 无欺骗干扰下的实际定位和欺骗干扰剔除后的定位情况比较

图11 无欺骗干扰下的定位精度(1σ)
文中对目前最为关注的智能相干跟踪欺骗干扰进行了理论分析研究,通过公式推导分析,说明了欺骗攻击过程中真实卫星信号和欺骗信号对用户接收机相关峰值之间的相互作用,并通过仿真和实际模拟试验,验证了欺骗干扰的智能跟踪和牵引效果,进而说明了智能相干跟踪欺骗干扰的隐蔽性。

图12 欺骗干扰剔除后的x轴位置误差(m)(1σ)
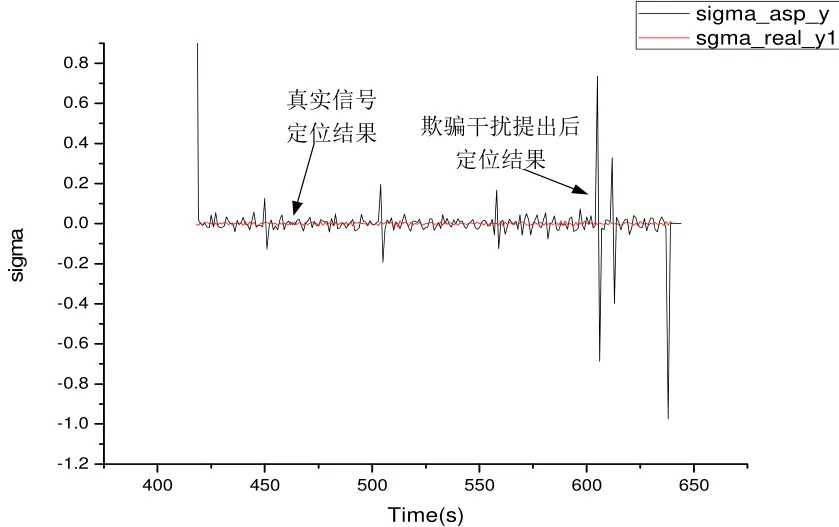
图13 欺骗干扰剔除后的y轴位置误差(m)(1σ)
建立典型的圆周欺骗干扰场景,说明用户平台只要处于一定的运动状态,则可通过渐变欺骗干扰,增大用户接收机的定位误差而不被发现,实现智能跟踪干扰,达到隐蔽诱骗目的。正是这种隐蔽性和误导性,使用户接收机平台系统不能很好地识别或剔除,继而启动备用的导航系统,如惯性导航,具有更大的破坏性。
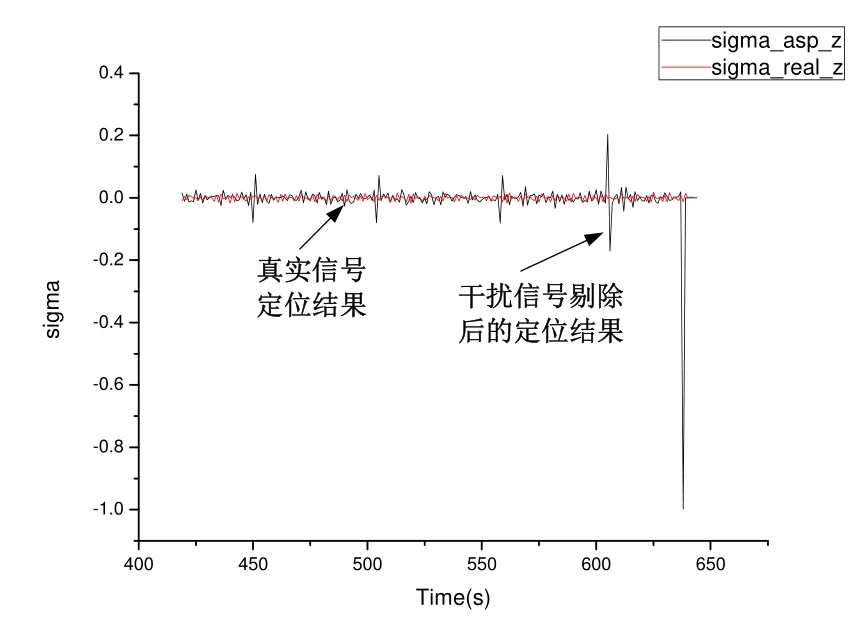
图14 欺骗干扰剔除后的z轴位置误差(m)(1σ)
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
导航定位学报(2022年1期)2022-02-17
海军航空大学学报(2021年1期)2021-09-01
通信电源技术(2020年22期)2020-03-27
航天电子对抗(2019年4期)2019-12-04
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年9期)2017-12-18
电子制作(2016年1期)2016-11-07
军事运筹与系统工程(2016年4期)2016-07-10
