
米波雷达航迹高度平滑研究
2018-07-10 11:19田厚坤
雷达与对抗 2018年2期
徐 伟,田厚坤,朱 伟,2
(1.中国电子科技集团公司第三十八研究所,合肥 230088;2.中国电子科技集团公司第三十八研究所 孔径阵列与空间探测安徽重点实验室,合肥 230088;3.中国电子科技集团公司第三十八研究所 综合电子信息处理实验室,合肥 230088;4.中国电子科技集团公司第三十八研究所 数字阵列技术重点实验室,合肥 230088)
0 引 言
米波雷达是指工作在甚高频(Very High Frequen-cy, VHF)频段的雷达,又称为VHF雷达。20 世纪30 年代的大多数雷达都工作在该频段[1-2]。随着微波技术和器件工艺水平的发展,对雷达系统的性能要求不断提高,工作频段也在向微波、毫米波发展。米波雷达由于体积庞大、测量精度低等原因发展处于停滞状态。近年来,随着低空/超低空突防、反辐射导弹、电子干扰和隐身技术等一系列反雷达技术的发展,已对现代雷达的生存构成重大威胁。由于米波雷达在频段上具有一定的反隐身性能,因此它又重新成为人们关注的对象,并且在现代战争环境下具有更强的战斗力和生存能力。
米波雷达也有其固有的缺点:测向精度低、易受地面反射的影响、易受通信网电台等公共设施的干扰。另外,米波雷达由于其波长较长,波束宽,特别是在测量低角目标时波束打地、地面反射强、多径现象严重,导致米波雷达测高精度低。[3]近年来,国内外学者对米波雷达低仰角测高进行了大量的研究,主要的研究方向有特征子空间类算法、最大似然(Maximum Likelihood, ML)及子空间拟合算法等超分辨测角算法。[4-5]这些算法的提出与应用取得了一些突破和成果,但是仍然有许多关键技术问题需要深入研究和解决。如何有效提高米波雷达在低仰角区的测角精度,提高高度平滑效果,至今仍然是雷达界的一个难题。由于低仰角测高精度较低,导致数据处理很难对于航迹高度进行准确的平滑和滤波,导致航迹的滤波后高度起伏较大,不能准确反映目标的真实情况。
本文提出了一种解决米波雷达高度平滑的算法,主要包括对航迹机动检测、针对机动检测调整相应的滤波器系数、对高度的输入值进行合理化修正等。实验结果表明,本文的方法对于常规目标和高机动目标具有更快的收敛时间和更好的平滑效果,且计算简单,便于工业实现。
1 航迹机动检测
当航迹得到更新完成精相关时,需要根据输入的点迹对于航迹本帧的机动水平进行检测。根据点迹时间计算航迹预测位置。根据公式(1),计算出归一化隶属度。
(1)
其中,δR、δA、δE为点迹与航迹预测位置在斜距、方位、俯仰上的测量一次差,σR、σA、σE为雷达在斜距、方位、俯仰上的测量均方根误差。
为了消除测量误差,对航迹机动水平进行平滑。设本帧航迹机动水平=0.7*本帧(k)的归一化隶属度+0.3*上一帧归一化隶属度。
根据算出的本帧航迹机动水平进行航迹机动性判断,见表1。
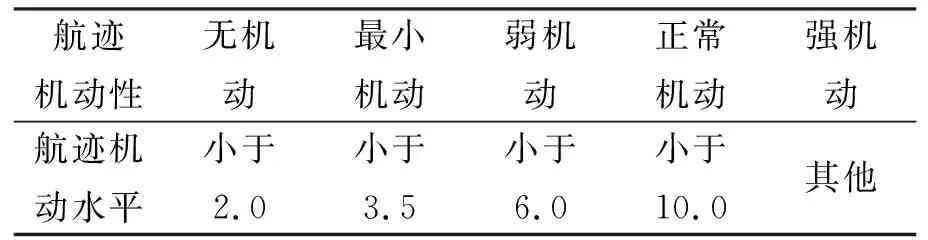
表1 航迹机动水平与机动性对应表
2 根据机动检测设置滤波器系数
本文以当前模型作为滤波器模型,说明滤波器系数的设置方法。当前模型的滤波器系数主要通过改变α和最大加速度系数。根据航迹机动性选择的滤波器系数如表2所示。
根据机动检测结果修正最大加速度αmax=αmax/最大加速度系数。实际使用中还可以根据雷达扫描周期等情况对α和最大加速度系数进行更加精细的设置。对于高度方向的滤波可仅将机动判断出无机动、最小机动和弱机动即可,更强的机动水平也仅采用弱机动的系数进行运算。
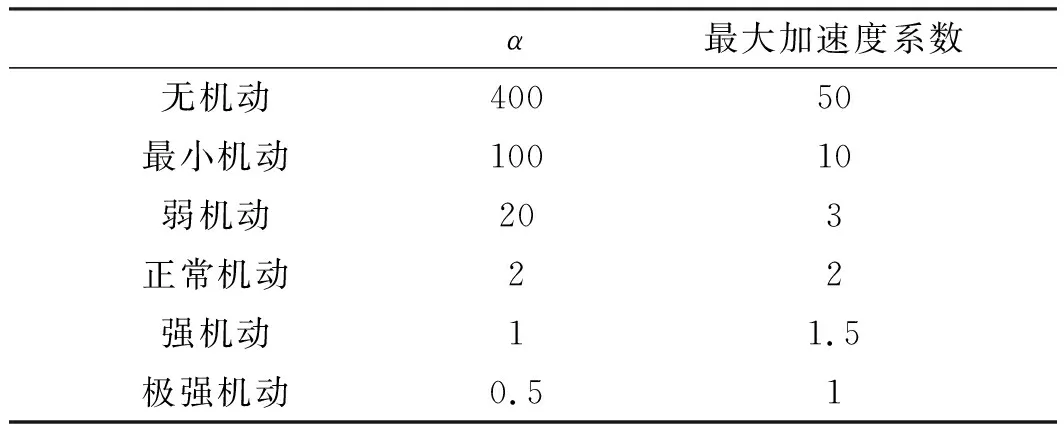
表2 根据航迹机动性选择不同的滤波系数
3 高度合理化修正
设根据雷达探测结果计算出的高度为Hi,目标最快高度机动速度为HMaxVelo(m/s),计算当前航迹的帧周期dt,则高度最多变化HMaxMov=HMaxVelo*dt。假设当前探测信息周期为k,目标观测高度Hi(k),当前航迹的滤波高度为H(k)。对计算得出的高度值进行合理修正,再将修正的高度送入滤波器进行滤波。修正方法如下:
步骤1若fabs(H(k-1)-Hi(k))>HMaxMov表明高度偏差可能由于测量误差造成,需要进行修正,进入步骤2;若不满足条件则不需要对高度输入值进行修正,直接可将点迹高度送入高度滤波器进行滤波处理。
步骤2若H(k-1)>Hi(k),则将修正输入高度Hc(k)=H(k-1)-HMaxMov,结束修正;否则进入步骤3。
步骤3修正输入高度Hc(k)=H(k-1)+HMaxMov,结束修正。
将修正后的高度Hc(k)作为高度滤波的输入值。关于HMax的选择,若选择过大则会导致高度平滑的效果不明显,若选择过小则会导致平滑结果过于滞后目标实际位置。经过多次实验,本文的建议是HMax选为比所观测目标的最大高度变化速度增大30%左右。例如,结合实际设备的对多种机型长期观察统计,可以得出目前主流战斗机在高度方向的最大变化速度没有超过300 m/s(例如F16战斗机爬升率约为280 m/s),所以本文选择将HMax设为400 m/s,实验效果也较为优化。
4 实验分析
针对上述分析结果,设计了3次实验。
实验设计1采用模拟目标进行验证。假设目标等速平直飞行,飞行真值高度为9 500 m,飞行距离200 km,以雷达为圆心飞行,雷达仰角测量误差为0.4°,目标飞行速度为276 m/s,雷达数据率为4 s,仿真时间为150帧数据。采用本文模型和当前模型的实验结果如图1所示,实验对比如表3所示。本文算法的高度rms误差相对当前模型降低5.86%。
实验设计2采用模拟目标进行验证。假设目标在高度上进行高机动飞行,目标真值高度为5 500+2 000cos(2πk/48),其中k为观察周期。对高度求导得到目标高度方向的速度为-4 000sin(2πk/48)/48,目标高度最大速度约为261 m/s。雷达仰角测量误差为0.4°,目标飞行速度为276 m/s,雷达数据率为4 s,仿真时间为150帧数据。采用本文模型和当前模型的实验结果如图2所示,实验对比如表3所示。本文算法的高度rms误差相对当前模型降低9.44%。
实验设计3采用模拟目标进行验证。假设目标在前48帧等速平直飞行,第49至96帧在高度上进行慢速机动飞行。该段目标真值高度为7 500+2 000cos(2π(k-48)/192),其中k为观察周期,对高度求导得到目标高度方向的速度为-4 000sin(2π(k-48)/192)/192,该段目标高度最大速度约为65 m/s,第97~150帧在高度上行高机动飞行。该段目标真值高度为5 500+2 000cos(2π(k-96)/48),对高度求导得到目标高度方向的速度为-4 000sin(2π(k-96)/48)/48。该段目标高度最大速度约为261 m/s,雷达仰角测量误差为0.4°,目标飞行速度为276 m/s,雷达数据率为4 s,仿真时间为150帧数据。采用本文模型和当前模型的实验结果如图3所示,实验对比如表3所示。本文算法更快地判断出了机动改变(如第97、109、132帧),且全部观测周期的高度rms误差相对当前模型降低66.13%。
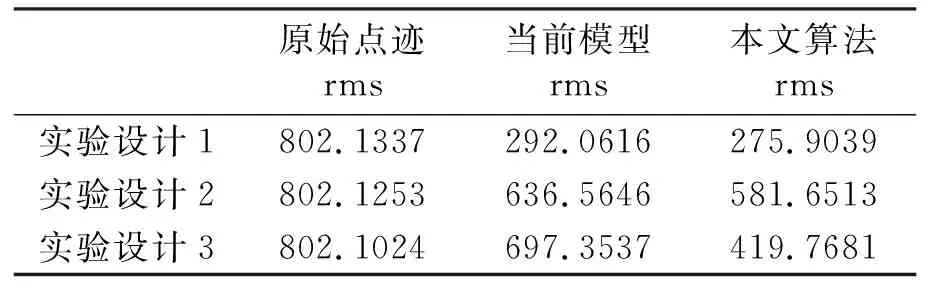
原始点迹rms当前模型rms本文算法rms实验设计1802.1337292.0616275.9039实验设计2802.1253636.5646581.6513实验设计3802.1024697.3537419.7681
5 结束语
由于米波数字阵列雷达在反隐身目标和对抗反辐射导弹等方面所体现出的优势,使其在现代雷达网中的地位显得越来越重要。然而,米波雷达由于易受地面反射的影响,在测量低角目标时存在波束打地、目标的多径现象严重,导致米波雷达测高精度低,甚至完全失效。本文围绕米波雷达高度平滑进行了一些研究,提出了相应的航迹机动检测与高度修正算法。通过具体实验与当前模型相比,本文算法的收敛性更快且跟踪精度更高,但当目标初始高度就存在较大误差时本文算法也会存在收敛较慢的问题,这也是下一步的研究方向。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
快乐语文(2021年35期)2022-01-18
雷达科学与技术(2020年4期)2020-09-11
军事运筹与系统工程(2019年3期)2019-08-13
当代陕西(2019年12期)2019-07-12
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
人间(2015年8期)2016-01-09
