
近地鱼形钝体气动阻力特性研究
2018-07-06 02:20杨志刚
同济大学学报(自然科学版) 2018年6期
朱 晖, 王 凡, 杨志刚
(1. 同济大学 上海地面交通工具风洞中心, 上海 201804; 2. 同济大学 上海市地面交通工具空气动力与热环境模拟重点实验室, 上海 201804; 3. 上海汽车集团股份有限公司乘用车公司, 上海 201804)
日益严格的乘用车燃油限值标准使得气动减阻问题成为汽车空气动力学研究的重点[1-3].目前,主要采用车身流线化设计、局部细节优化、气动套件的设置进行车身气动减阻,尽管取得一定的减阻效果,但由于传统车身形态的约束,致使气动减阻的难度日益增大[4-7].因此,要实现气动阻力的显著降低,必须寻求新的设计方法.
仿生学在汽车设计上的应用一直是国外汽车设计师不断探索的前沿领域,仿生设计已经成为汽车革新设计的一个新方向.2005年,奔驰公司在华盛顿车展上推出仿生概念车Mercedes-bionics,其风阻系数仅为0.19[8],见图1.该仿生低阻车的诞生,意味着仿生设计在汽车气动减阻领域的成功运用.遗憾的是,奔驰公司仅公布出气动阻力风洞试验结果,并未进行相关机理分析.

图1 仿生概念车Mercedes-bionics
Mercedes-bionics的出现促使人们对其仿生原型——粒突箱鲀力学特性的关注,如图2所示.目前,探索箱鲀形体水动稳定性及操纵性的规律及机理成为仿生学研究的热点[9-13], 而以气动减阻为仿生设计目标的机理研究相对匮乏.
本文采用数值仿真与风洞试验相结合的方法对以粒突箱鲀为仿生原型的近地鱼形钝体的气动阻力特性展开研究;将Realizablek-ε、RNGk-ε、Standardk-ε以及SSTk-ω4种湍流模型的仿真预测结果与试验值进行比对,筛选出预测准确性较高的湍流模型,并根据其仿真结果分析近地鱼形钝体气动阻力特性的形成机理.

图2 粒突箱鲀
1 模型风洞试验及相关数值仿真
1.1 模型简介
粒突箱鲀的体甲大致呈四棱状,无背部中棱,腹面呈弧状,体甲中段的横截面投影近似呈方形.模型对用于维持游动时稳定性及操纵性的背鳍、臀鳍、胸鳍、尾鳍予以简化;同时对眼突进行光顺处理.
成年的粒突箱鲀体长可达45 cm(含尾鳍),考虑到模型风洞静压系数稳定试验段的有效长度;参照整车长度为5 m时进行缩比后所得模型长度为0.33 m;同时考虑到测压管安装空间等因素,最终确定箱鲀模型长度为0.34 m;模型采用代木加工制作,对表面进行哑光黑漆喷涂处理,如图3所示.

图3 试验模型
1.2 风洞试验
风洞试验平台为上海地面交通风洞中心3/4开口式1∶15缩比模型风洞,喷口面积为0.123 m2, 驻室长、宽、高分别为1.57 m、1.185 m、0.818 m,最高风速为49 m·s-1,试验段轴向静压系数梯度小于0.005 m-1,来流湍流度为0.5%,阻塞比为9.87%.
试验内容包括气动阻力测量、表面压力测量及粒子图像速度(PIV)测量.测力试验采用自主设计的电子秤测力装置,分别在20、25、30和35 m·s-14种试验工况下进行测量.图4为测力试验原理图,模型两端的连丝线绕过前、后布置的滑轮与砝码相连;前端连接的砝码质量大于后端所连砝码质量,且保证在风速35 m·s-1时电子秤依然受到砝码的下压力.无风时,模型两端的丝线在砝码的作用下张紧,将电子秤的读数清零作为测量基准;起风时,气动阻力使电子秤受到的下压力减小;将电子秤读数的绝对值乘以0.009 8,即为相应风速下的气动阻力大小.
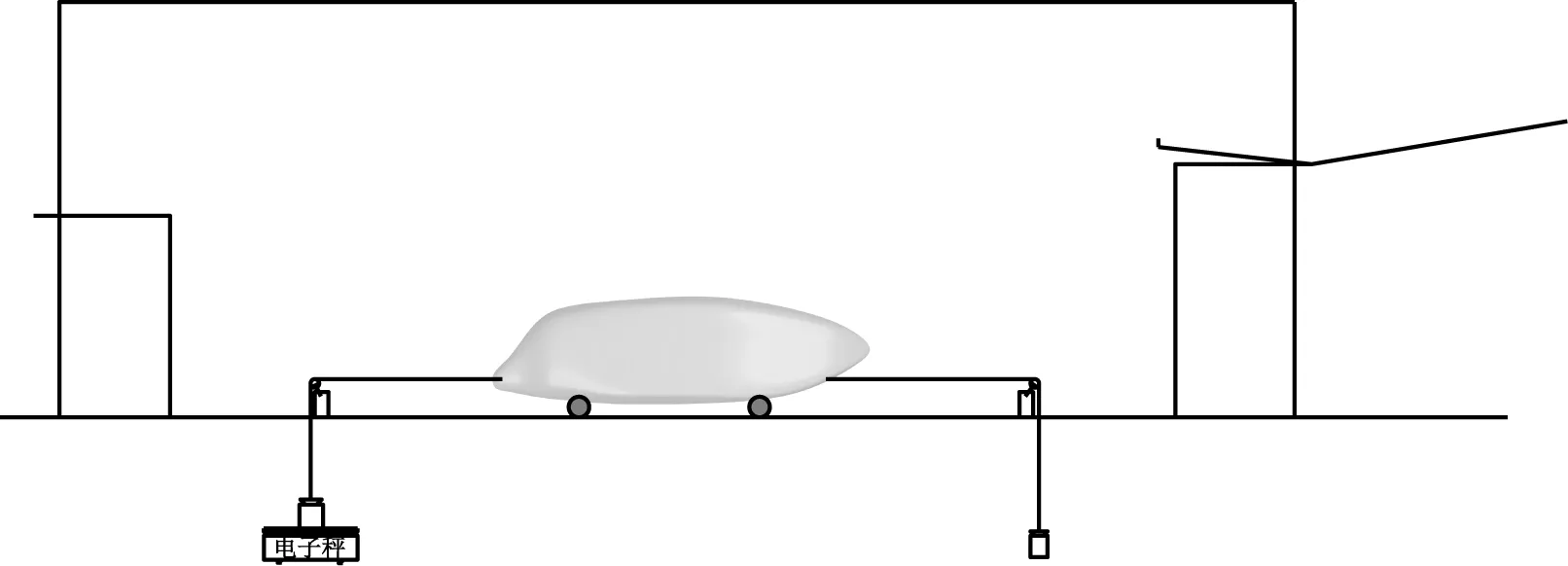
图4 测力试验原理图
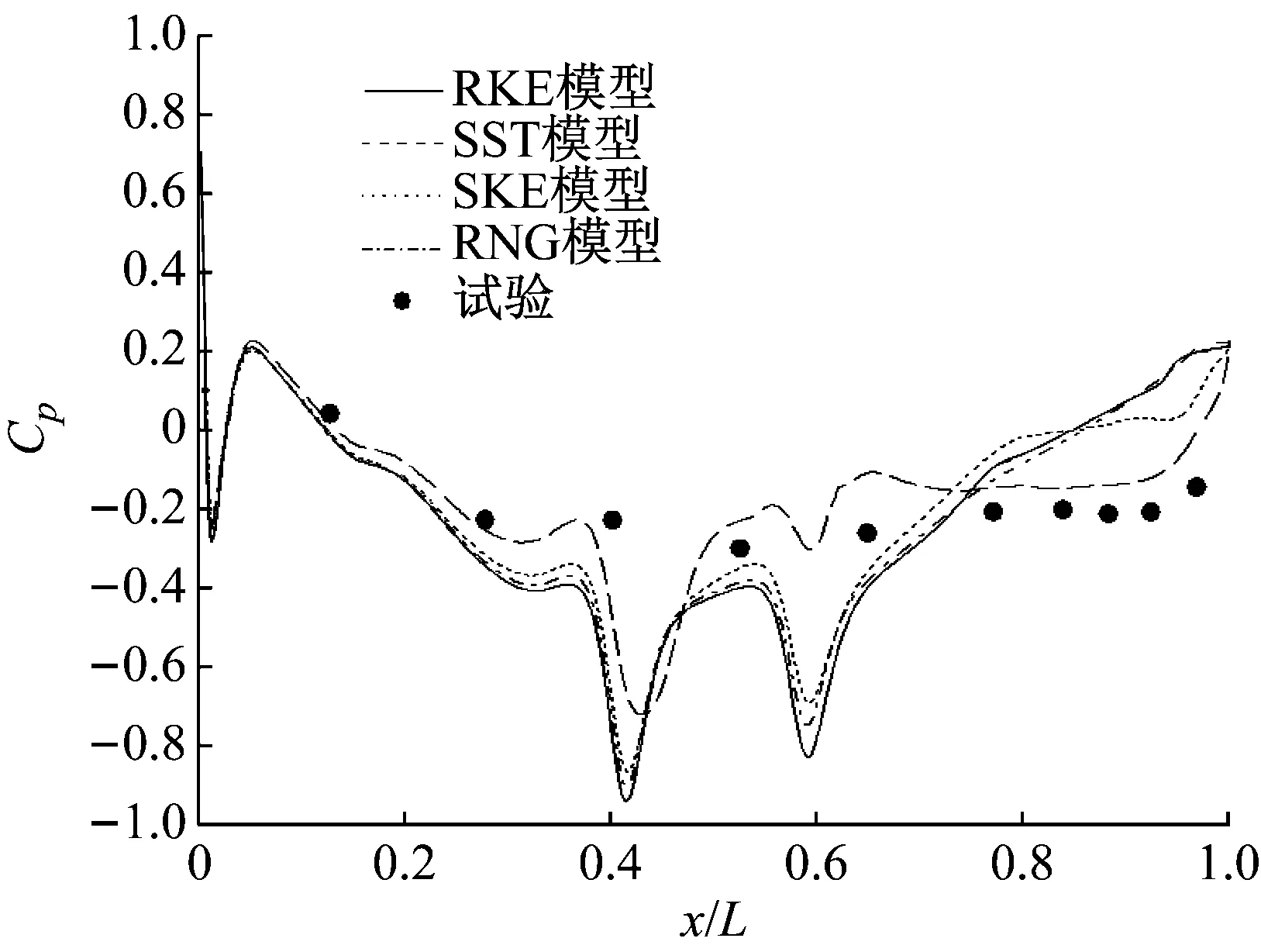
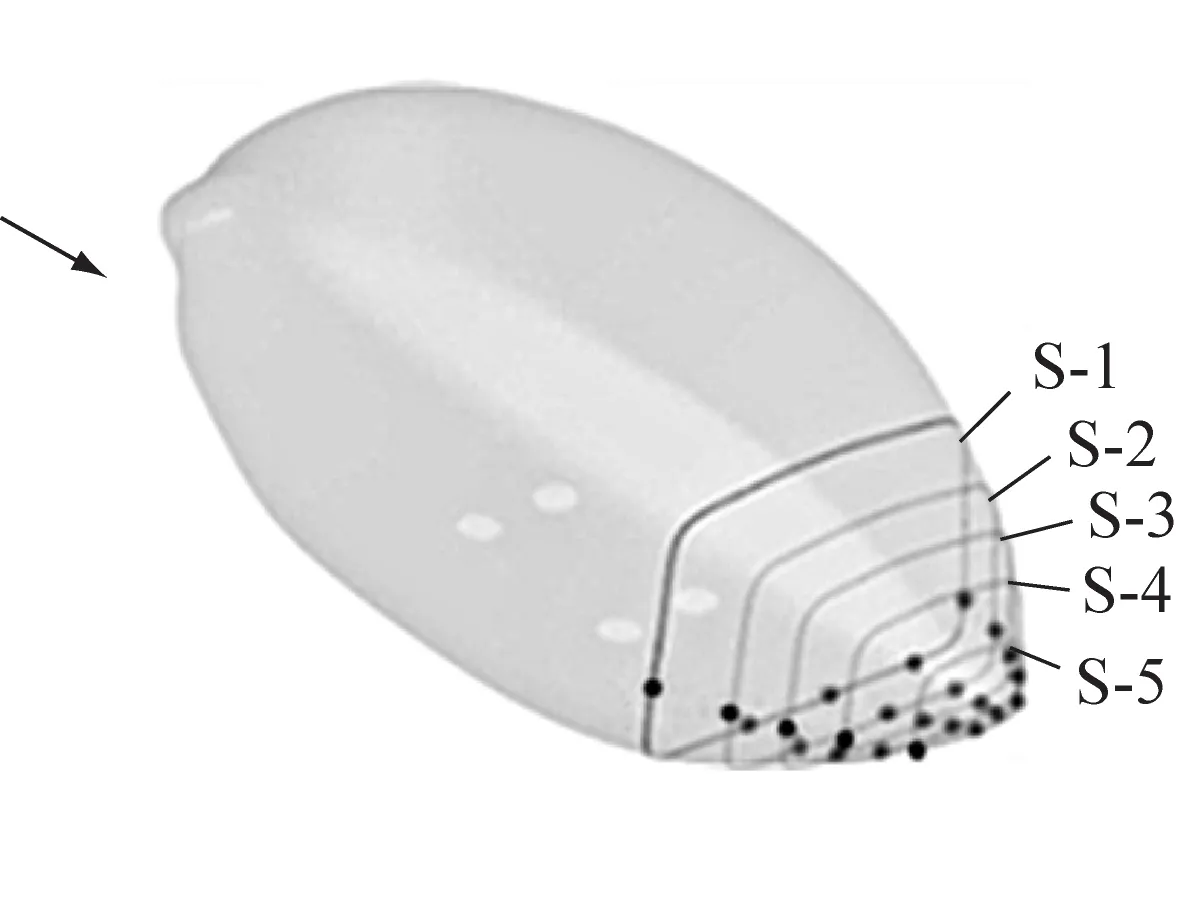
在模型的中截面及尾部表面的法向开孔并埋入测压管以获得压力数据,尾部测压孔采用交叉布置方式以消除相邻测压孔之间的相互干扰.粒子图像测速(PIV)试验获得尾迹区选定横截面处的速度分布数据,用于分析尾流区的流动结构,位置示意见图5.测量所用PIV激光器最大脉冲能量为500 mJ,相机分辨率为6 600×4 400 像素,采样频率为1.5 Hz.
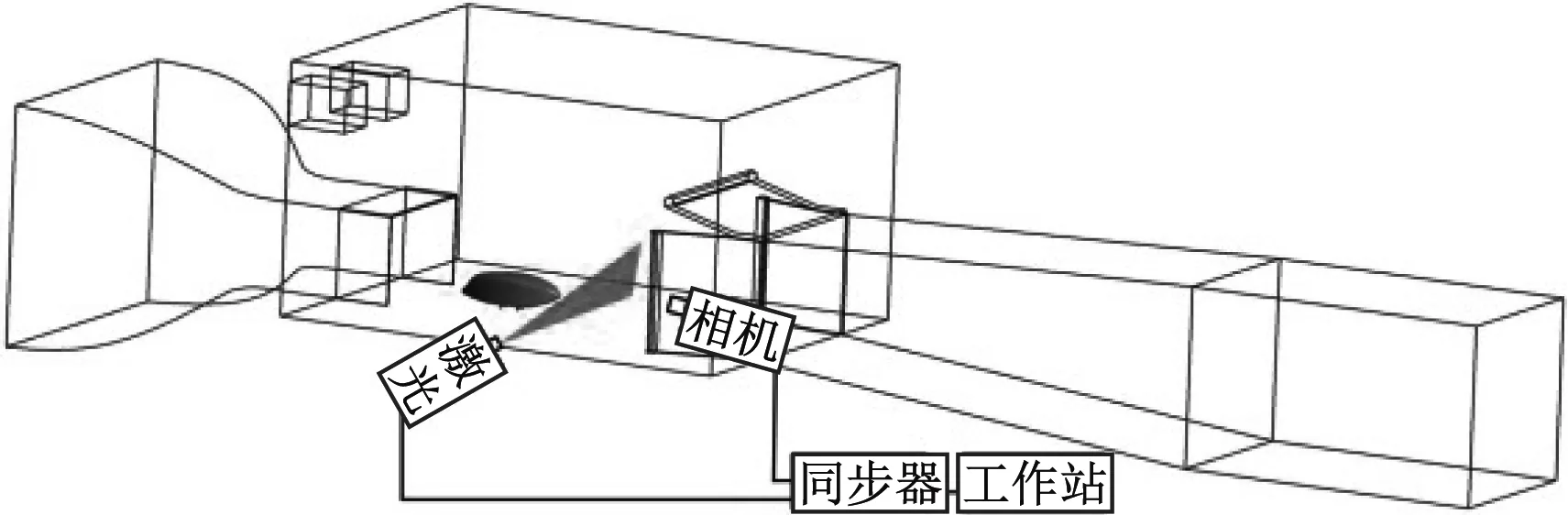
图5 测量平面示意图
1.3 数值仿真
取模型风洞的收缩段、试验段、扩散段等主要部分作为数值仿真的计算域,如图6所示.入口边界条件为速度入口;出口边界条件为出流出口;通风口边界条件为通风口;其他统一设置为固定壁面.入口与喷口的面积比为6∶1,在设置入口速度时应按比例进行换算.
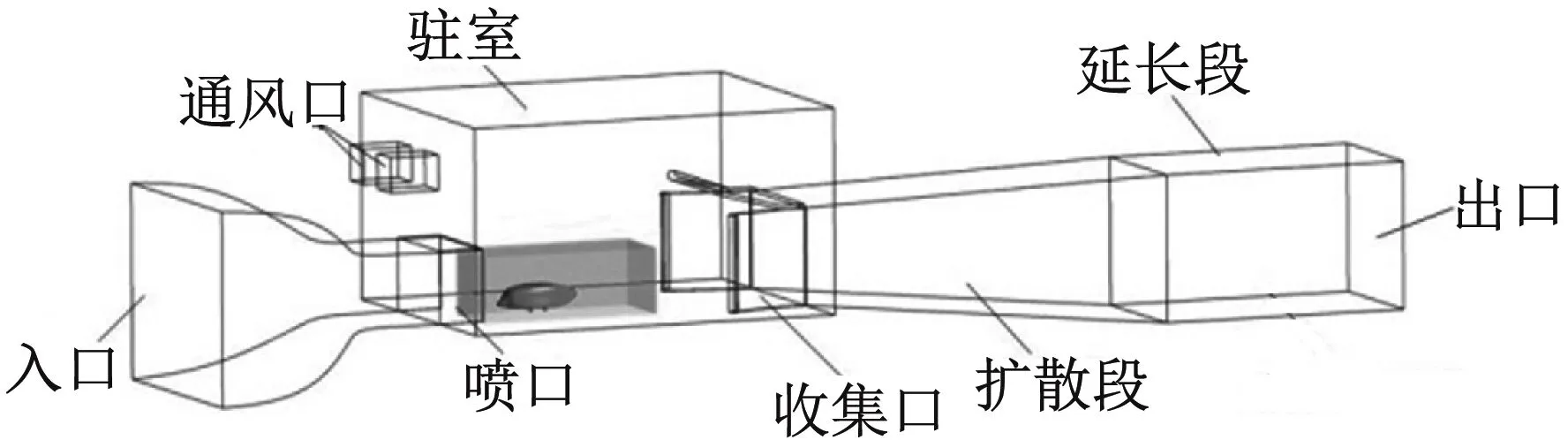
图6 数值仿真计算域
采用混合网格划分策略:在驻室内分隔出一块包覆模型的长方体,其内部生成四面体网格,长方体与模型风洞之间生成六面体网格,如图7所示.模型面网格尺寸为0.3~0.7 mm,仅在模型及地板表面生成边界层,高度增长率统一设为1.15.
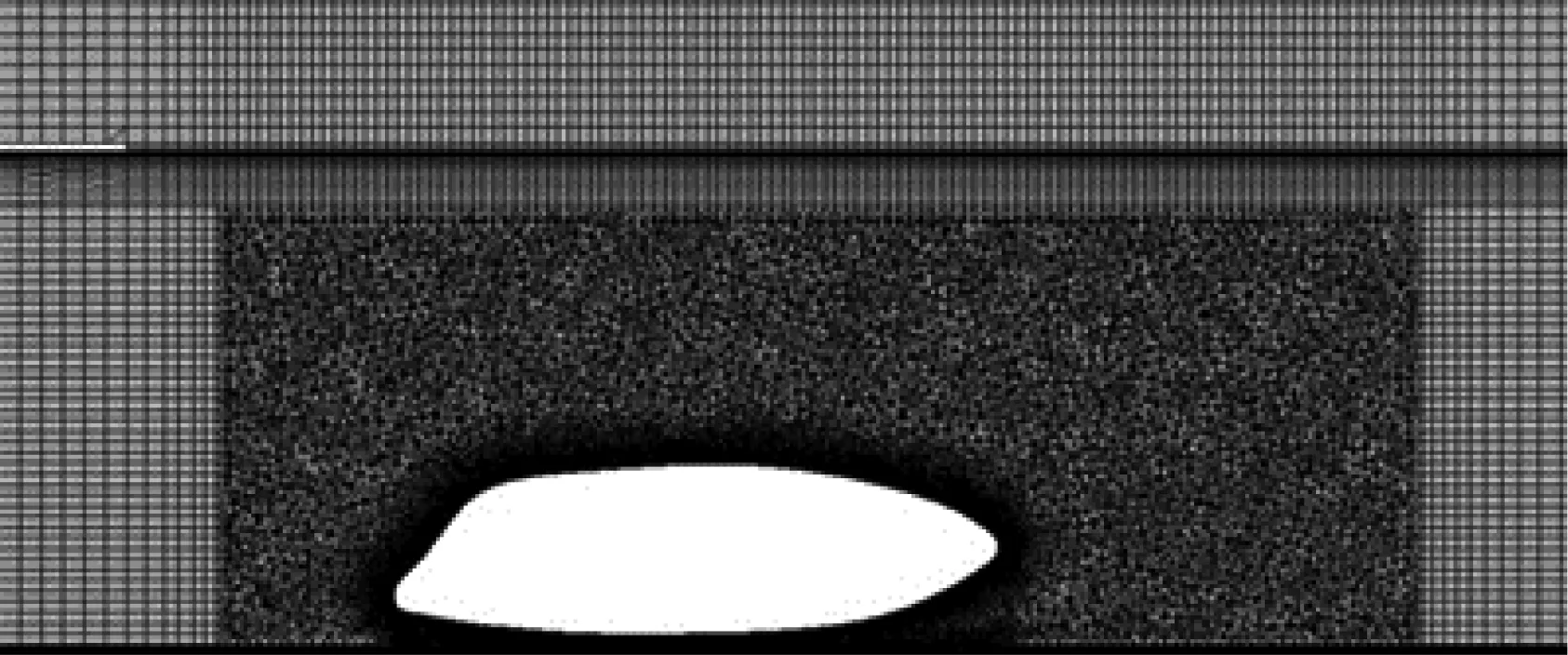
图7 体网格截面
选用Realizablek-ε、RNGk-ε、Standardk-ε以及SSTk-ω4种湍流模型(以RKE、RNG、SKE、SST简化表达)对流场进行求解.对流项和扩散项皆采用二阶离散格式,以Simple算法实现压力-速度耦合.湍流模型对应的边界层设置参数见表1.
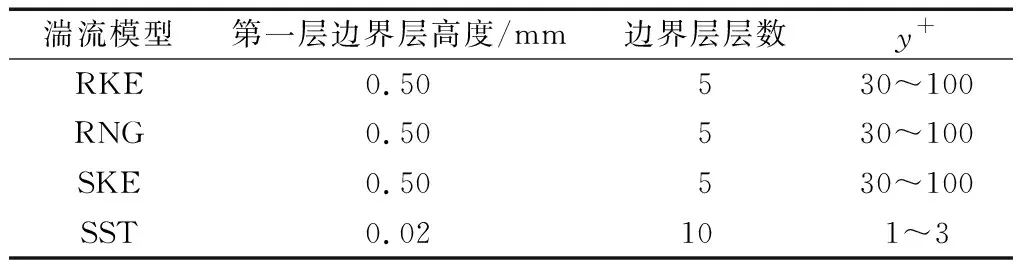
表1 边界层设置
2 试验及仿真结果分析
钝体模型在不同风速v下气动阻力系数CD的试验值及计算值见图8.随着试验风速的增加,CD的试验值及计算值逐渐减小,这是因为随着雷诺数的增加,壁面处流动边界层所获得的能量增高,抵抗逆压梯度的能力增强,使得模型前、后的压差随之减小.与试验值相比,SST的仿真结果较为准确,最小误差仅为0.000 1;RKE、RNG、SKE的预测精度普遍较低,且随着风速的增加误差逐渐变大.总之,试验及仿真所得钝体模型气动阻力系数值明显低于Ahmed及MIRA类车体的气动阻力系数范围(0.25~0.35),因此近地鱼形钝体确为气动低阻形体.

图8 气动阻力系数
图9显示了模型纵向对称面压力系数Cp的分布特征.图中,X/L为X方向相对位置.在模型上表面,压力系数曲线的走势与模型表面的轮廓曲率变化紧密相关,气流越过模型吻部滞止点后,经外凸的头部沿背部向尾部流去,压力系数呈现先减小后增大的变化趋势.试验值与计算值之间基本吻合,偏差主要出现在模型的尾端区域,且越靠近尾端偏差值越大.在模型下表面,试验值与计算值之间偏差较大,由于支撑结构的存在使得模型底部流通面积减小,4种湍流模型均预测出相应位置处的压力系数峰值,其中SST模型计算所得的峰值较小.然而,试验并未捕捉到支撑结构处的压力峰值特征,原因可能为:在支撑结构附近布置测压点的空间受限导致测压点数目不足,造成针对该区域的压力系数测量不够充分.总体上,SST模型更加准确地预测出模型纵向对称面上的压力分布规律.
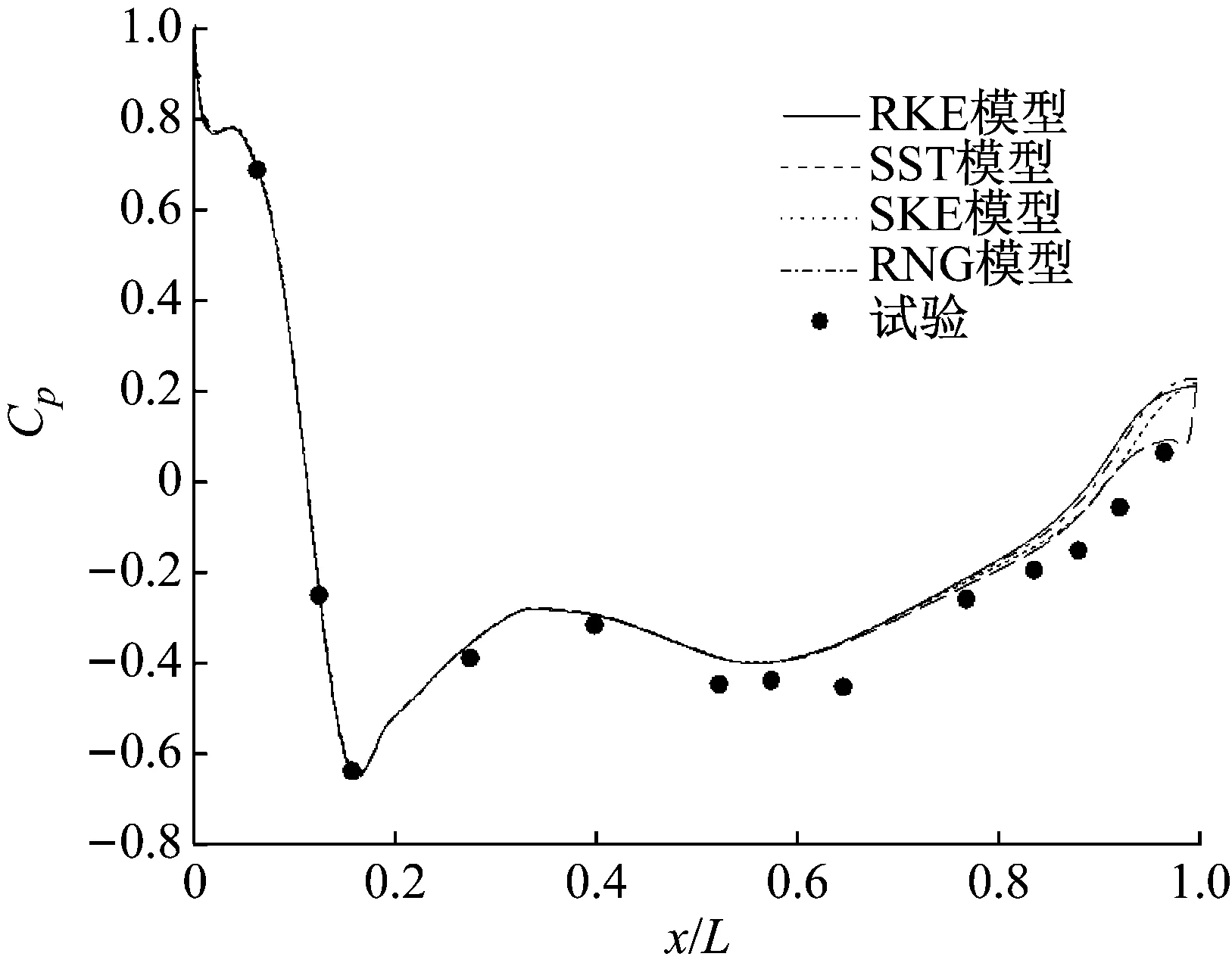
a 上表面
b 下表面
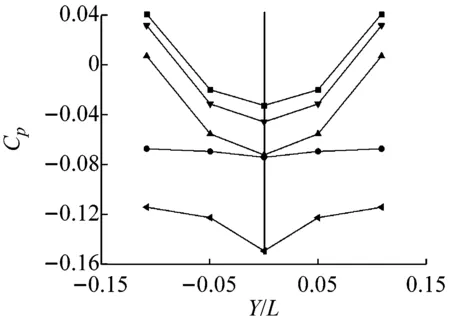
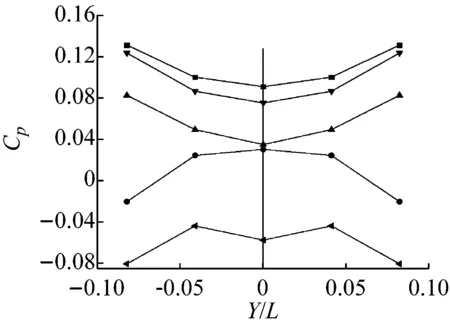
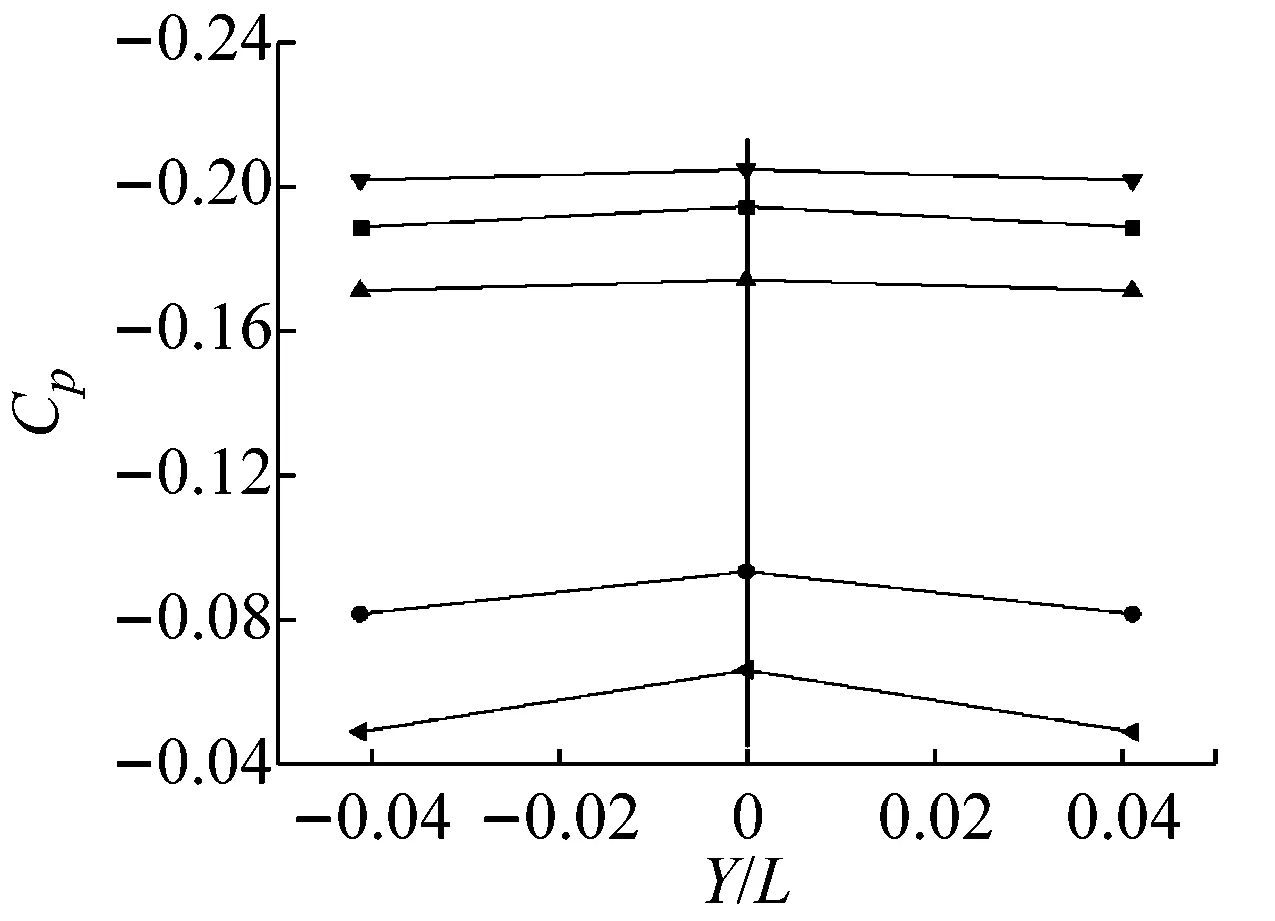
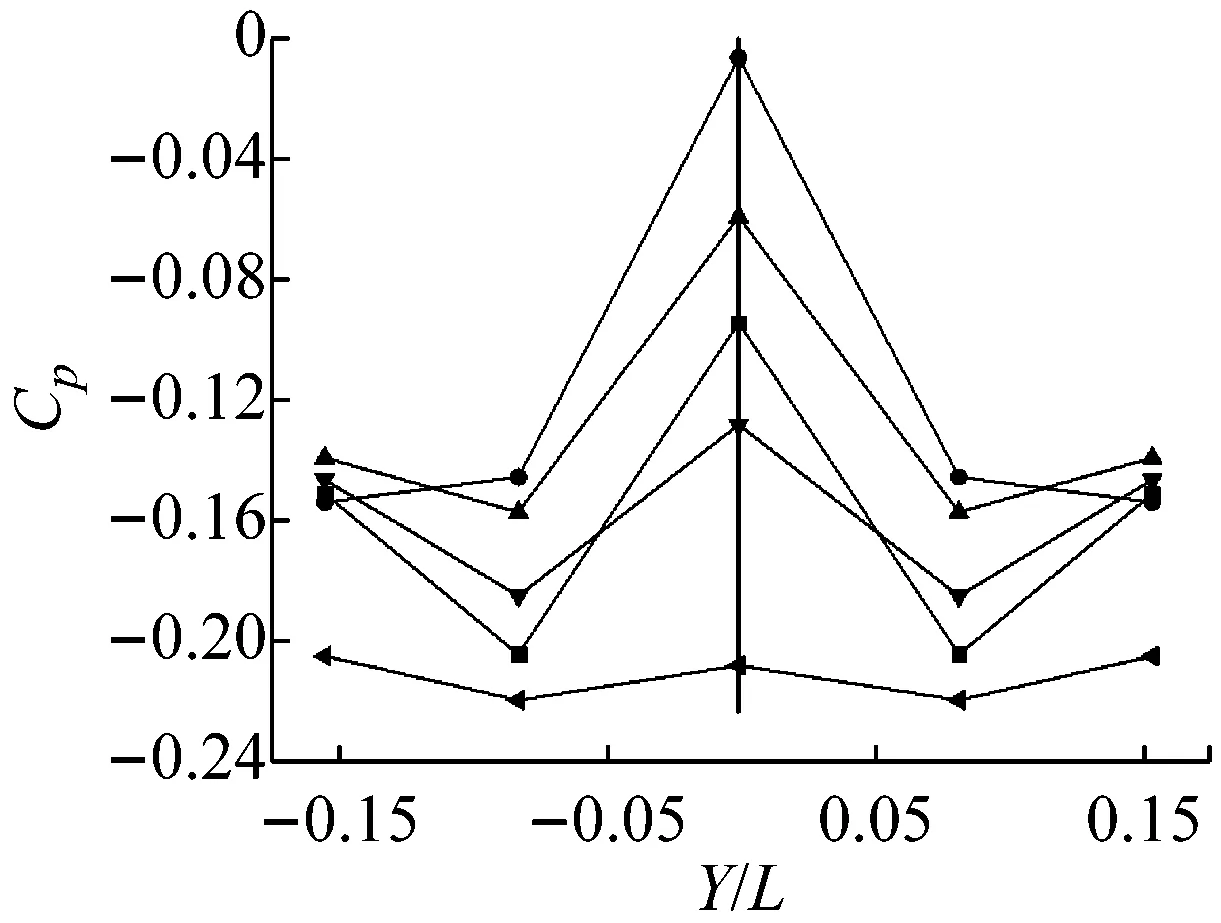
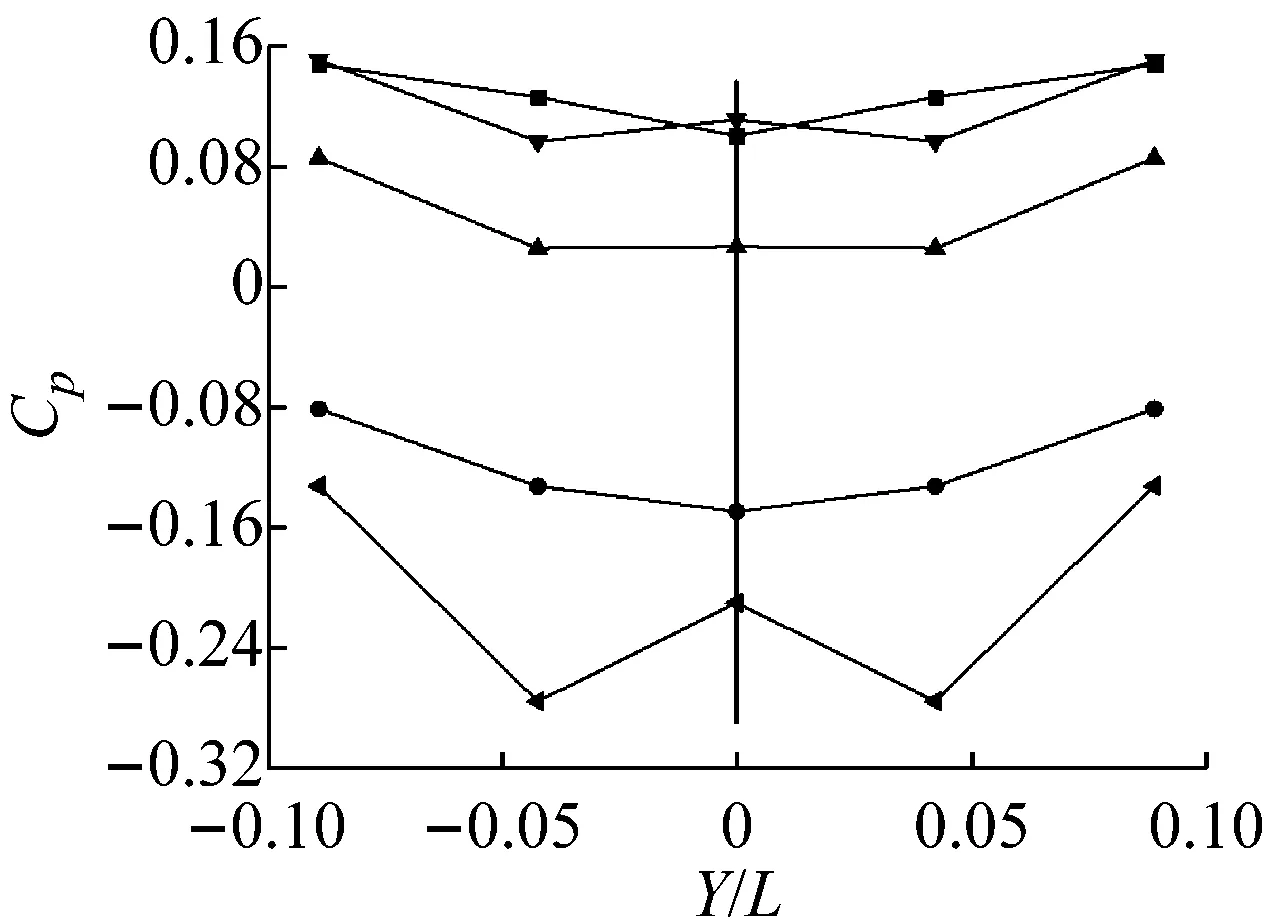
图10给出了尾部上表面的压力系数分布.图中,Y/L为Y方向相对位置.在尾部上表面,压力沿流向逐渐回升至正值;在截面S-1、S-2、S-3位置处,中间区域压力低于两侧压力;随着气流向后发展(截面S-4),试验及仿真所得的展向压力系数分布之间出现差异,其中RKE、SKE、RNG预测的压力系数延续之前的分布规律,而试验及SST仿真结果显示了中间区域的压力要高于两侧;当气流接近尾端时(截面S-5),试验及仿真所得压力系数再次呈现相同的展向分布趋势,即中间高两侧低.与测压试验结果相比,4种湍流模型预测的压力分布普遍偏高,其中RKE、RNG、SKE预测的展向压力分布沿流向同步变化,而SST的预测值与试验结果呈现近乎相同的分布规律,且预测值与试验结果较为接近.图11给出了尾部下表面的压力系数分布.在尾部的下表面,不同位置的展向压力分布曲线相对平缓,仅在支撑位置处出现较大幅度的压力变化.比较测压试验及仿真结果,不同湍流模型计算所得压力分布仍高于试验值.RKE、SKE、RNG模拟得到的压力系数沿流向逐渐回升至正值,而试验及SST仿真结果并未出现明显的压力回升趋势,并且压力水平始终为负.综合图10和图11可知,SST模型的预测准确性较高;4种湍流模型计算所得尾部压力值均高于相同位置的试验值,故前、后压差相对较小,导致仿真所得气动阻力系数CD小于试验值.
a 测点分布

b 截面 S-1

c 截面S-2
d 截面S-3
e 截面S-4
f 截面 S-5

图10尾部上表面压力系数分布
Fig.10Cpdistributiononuppersurfaceoftail
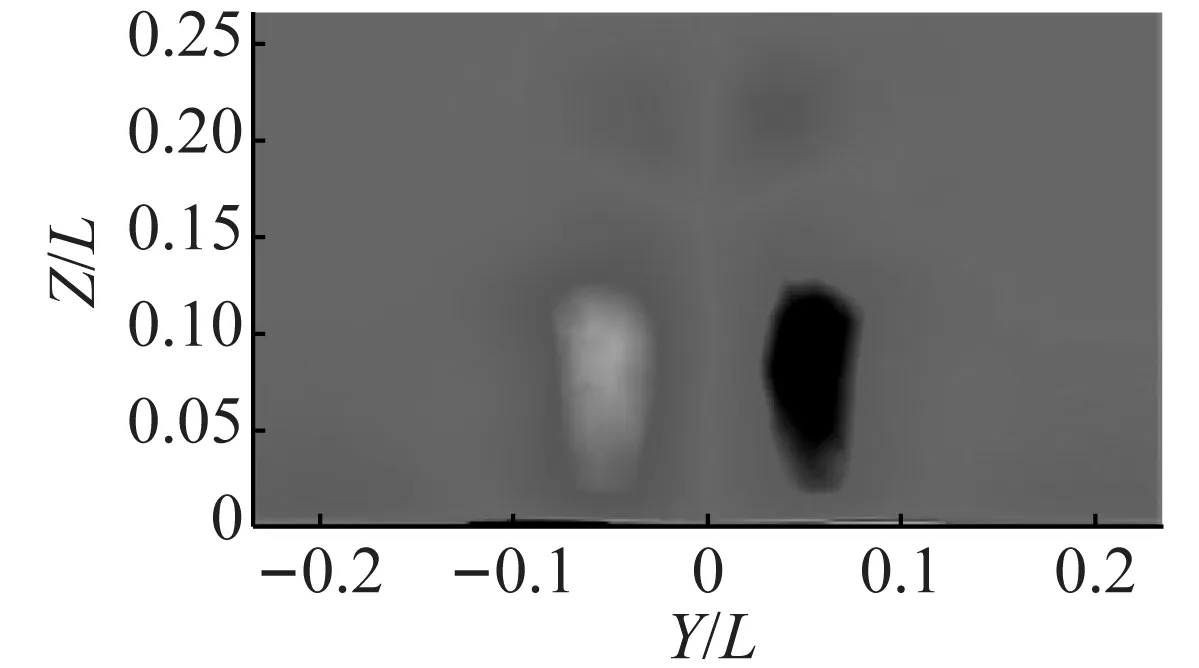
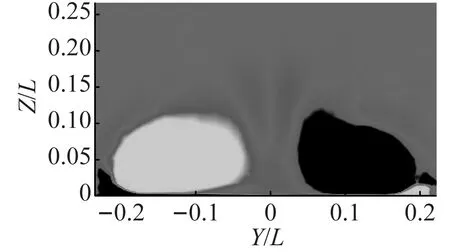
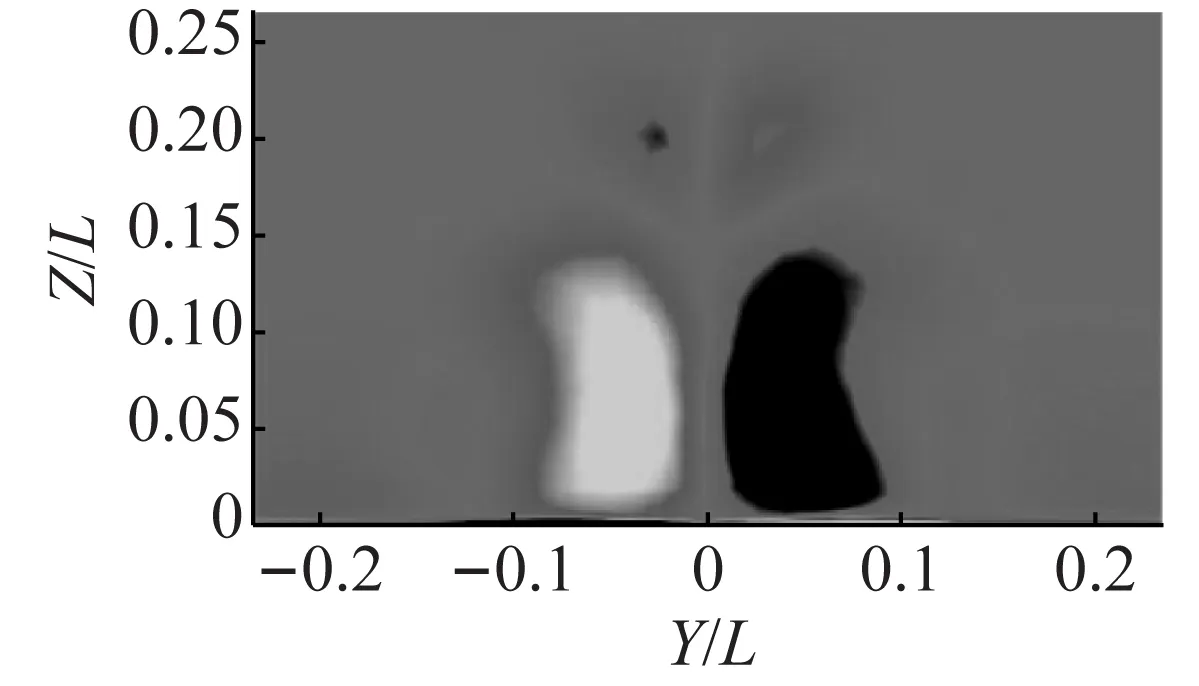
图12为尾迹区内X/L=0.44横截面处的涡量云图.图中,Z/L为Z方向相对位置.由图可知:靠近地面处左右对称分布的正负涡量区域表明该区域存在拖曳涡对;拖曳涡对的强度越大,分离现象越显著,因此气动阻力也就越大.4种湍流模型预测的拖曳涡对强度及尺度明显小于试验结果,导致仿真所得气动阻力系数CD偏低.4种湍流模型仿真所得拖曳涡对形态特征存在明显差异, RKE、SKE、RNG预测的涡对在对称面附近集中分布,近似呈腰果状;SST的仿真结果与试验结果较为相似,拖曳涡对呈椭圆形向外展开.
从气动阻力系数、形体表面压力分布及尾迹区流场结构3个方面对比分析可知,4种湍流模型中SST模型的计算准确性较高.究其原因,SST模型通过联合函数将k-ε模型与k-ω模型相结合,在近壁面处使用k-ω模型,而在边界层外及自由流区域使用k-ε模型;与RKE、SKE、RNG高雷诺数湍流模型采用壁面函数法对近壁面区域未充分发展的湍流流动进行近似计算的方法不同,k-ω模型在近壁面区域直接采用低雷诺数流动计算方法,因此该模型对仅能引起尾端小分离流动的逆压梯度敏感度较高.总之,将k-ω模型的仿真结果作为后续机理分析的依据较为合理.
a 测点分布
b 截面 S-1
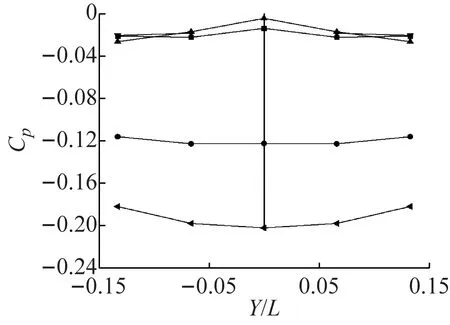
c 截面S-2
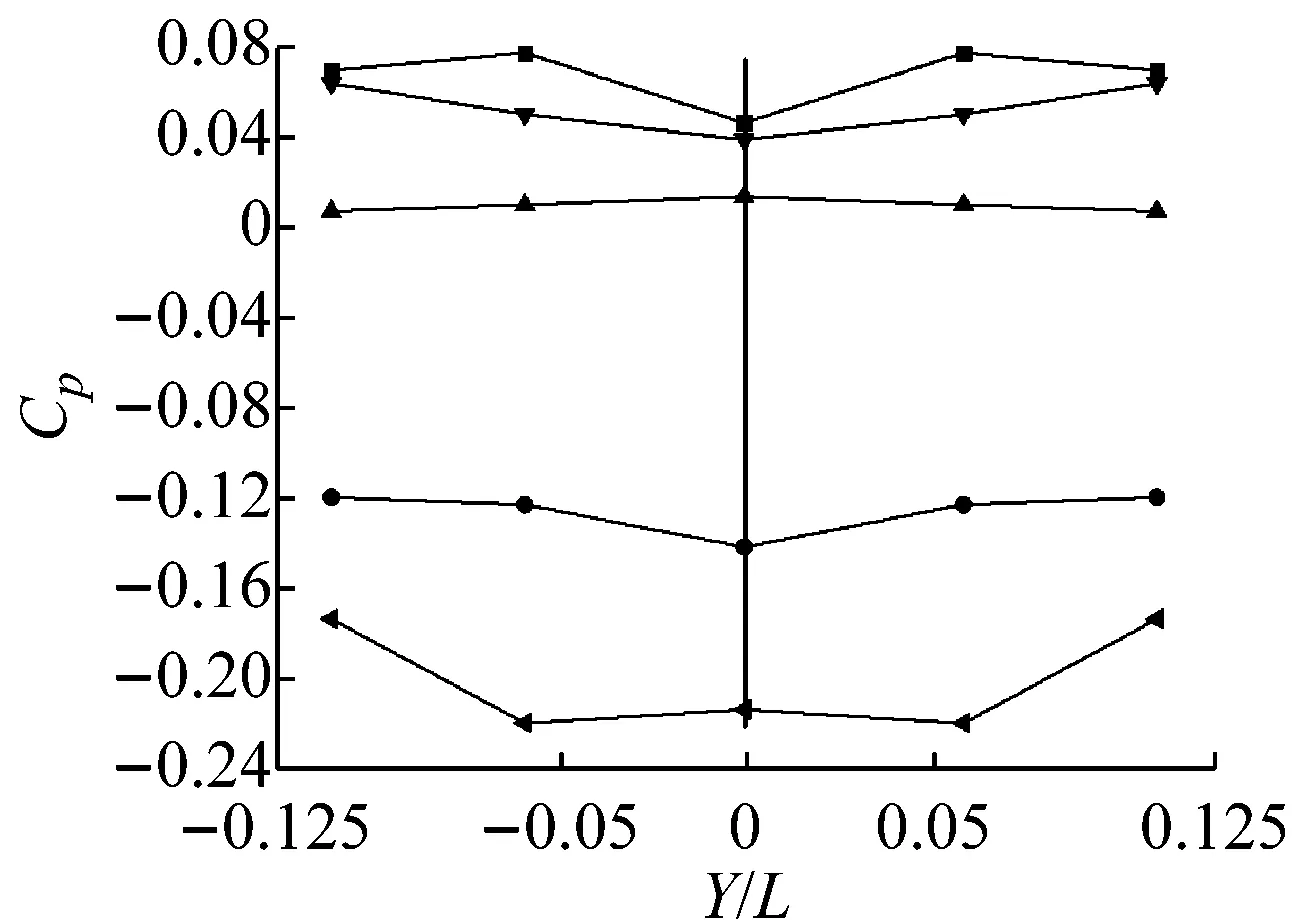
d 截面S-3
e 截面S-4

f 截面 S-5

图11尾部下表面压力系数分布
Fig.11Cpdistributiononlowersurfaceoftail
3 气动低阻特性机理探讨
着眼于模型的形态特征,其尾部两侧面及上、下表面在尾端收敛于一点,近似于半纺锤体;由于纺锤体的尾部收缩角较大,使得形体后部的压力水平显著增高.由图13可知,模型的尾端处于正压区中,因此形体所受压差阻力相对较低.对于常见的乘用车型及类车体而言,其尾部通常也会存在尾部收缩角、后风窗倾角、离去角等结构特征,但为了满足乘员舱后排空间及行李箱空间的要求,此类角度的取值范围较小,故尾部收缩所引起的压力回升幅度较低;此外,受尾迹区大分离流动的影响,后风窗的局部区域及行李箱端面处压力水平通常为负,故整体的压差阻力较大.
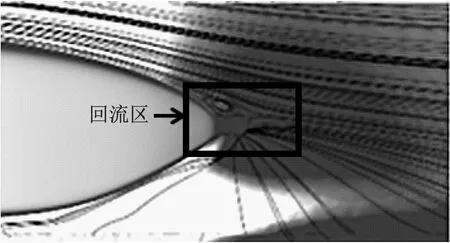
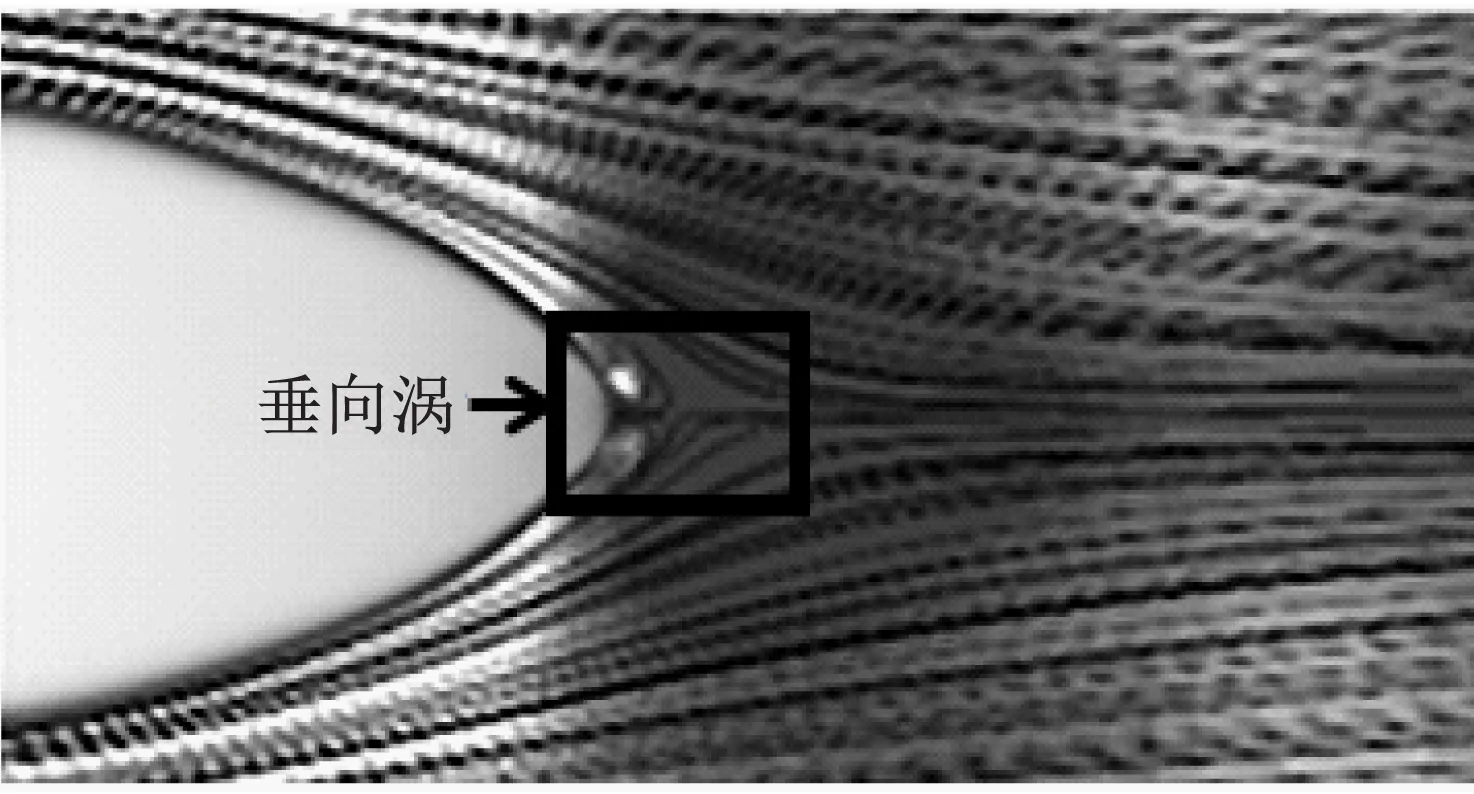
图14为计算所得形体表面油流谱.形体表面的摩擦应力线在远离尾部的位置沿流向平顺发展;在尾端上表面及两侧面存在分离线,形体表面的气流自此离开壁面,形成尾端上方的局部回流区(图13a)及尾迹区的垂向涡结构(图13b).由图13可知,局部回流区及垂向涡中心仍处于正压水平.与尾端下方的拖曳涡结构相比(图12),回流区及垂向涡结构的尺度明显较小,特别是垂向涡对结构可忽略其影响.在尾端的下表面,摩擦应力线稀疏,气流在支撑杆后方不远处经三维分离线发生分离,而后与分离焦点处衍生的集中涡线混合形成尾端下方的三维旋涡流动.如图15所示,该拖曳涡对在形体后部逐渐向两侧展开.
近地鱼形钝体的尾迹区中同时存在局部回流区、垂向涡对及拖曳涡对.由逆压梯度引起的气流分离导致局部回流的产生,回流区域越大,分离越显著,前、后压差相应增大;该形体尾部上方靠近尾端的小分离引起了回流,而尾端下方的气流分离后主要参与形成拖曳涡对,故未出现类似于传统汽车行李箱后方的展向涡对.尾迹区的垂向涡对形成机理与局部回流区形成机理类似,由于尾部收缩角度大,使得尾部压力水平回升显著(相关机理分析见文献[14]),因此垂向涡对处于正压内;与垂向涡对相比,从尺度及强度两方面考察,尾端下方的拖曳涡对是影响尾部压力分布的主导因素.拖曳涡对为了维持其流动特征,不断由主流区内汲取能量,使得形体所受气动阻力增加.
综上,尾迹区以一对拖曳涡为主要流动结构,相比于传统汽车尾迹区内由C柱涡、展向涡、垂向涡组成的复杂流动结构而言,近地鱼形钝体绕流场的流动结构简单,形体尾部受低压区的影响较小.

a 试验
b RKE模型
c SST模型

d SKE模型
e RNG模型
4 结论
(1) 从气动阻力系数、表面压力系数及尾迹区流场结构三方面考察,在RKE、SKE、RNG、SST 4种湍流模型中,SST模型针对近地鱼形钝体外部小分离绕流场参数的计算结果与试验值较为接近.

a 对称面
b 水平面
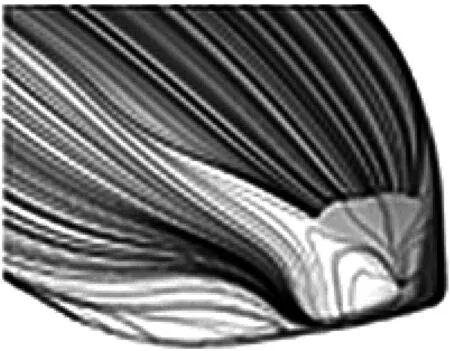

图15 三维流线
(2) 近地鱼形钝体的气动阻力系数远低于传统车型及常见类车体的气动阻力系数范围,因此该形体具有很高的空气动力学效率.
(3) 近地鱼形钝体尾部大收缩角的形态特征及尾迹区相对简单的流场结构决定了其气动低阻特性.尾部大收缩角使得形体后部压力得以充分回升,从而使局部回流区及垂向涡对处于正压区内,减小了前后压差;尾迹区相对简单的流场结构耗损的主流能量较少,降低了形体的气动阻力.
参考文献:
[1] HUCHO W H. Aerodynamics of road vehicles [M]. 4nd ed. Detroit: SAE Inc, 2004.
[2] 谷正气. 汽车空气动力学[M]. 北京:人民交通出版社,2005.
GU Zhengqi. Automotive aerodynamics [M]. Beijing: China Communications Press, 2005.
[3] 傅立敏. 汽车空气动力学[M]. 北京:机械工业出版社,1998.
FU Limin. Automotive aerodynamics [M]. Beijing: China Machine Press,1998.
[4] GAGNON L, RICHARD M, BEARDSELL G,etal. The process of making an aerodynamically efficient car body for the SAE supermileage competition[C]∥SAE Technical Paper. Detroit: SAE, 2012: 2012-01-0176.
[5] D’HOOGE A, PALIN R B, JOHNSON S,etal. The aerodynamic development of the tesla model S-part 2: wheel design optimization[C]∥SAE Technical Paper. Detroit: SAE, 2012: 2012-01-0178.
[6] BURTON D, MCARTHUR D, SHERIDAN J,etal. Contribution of add-on components to the aerodynamic drag of a cab-over truck-trailer combination vehicle [J]. SAE International Journal of Commercial Vehicles, 2013, 6: 477.
[7] SCHAUT N, SENGUPTA R. Aerodynamic optimization of trailer add-on devices fully-and partially-skirted trailer configurations [J]. SAE International Journal of Commercial Vehicles, 2015, 8: 695.
[8] SHARFMAN B. Mercedes and the boxfish [J]. The Scientist, 2006, 20(9):17.
[9] VAN WASSENBERGH S, VAN MANEN K, MARCROFT T A,etal. Boxfish swimming paradox resolved: forces by the flow of water around the body promote manoeuvrability [J]. Journal of the Royal Society Interface, 2015, 12(103): 1146.
[10] BARTOL I K, GHARIB M, WEBB P W,etal. Body-induced vortical flows: a common mechanism for self-corrective trimming control in boxfishes [J]. Journal of Experimental Biology, 2005, 208(2): 327.
[11] BARTOL I K, GHARIB M, WEIHS D,etal. Hydrodynamic stability of swimming in ostraciid fishes: role of the carapace in the smooth trunkfish lactophrys triqueter (teleostei: ostraciidae) [J]. Journal of Experimental Biology, 2003, 206(4): 725.
[12] BARTOL I K, GORDON M S, GHARIB M,etal. Flow patterns around the carapaces of rigid-bodied, multi-propulsor boxfishes (teleostei: ostraciidae) [J]. Integrative and Comparative Biology, 2002, 42(5): 971.
[13] BARTOL I K, GORDON M S, WEBB P,etal. Evidence of self-correcting spiral flows in swimming boxfishes[J]. Bioinspiration & Biomimetics, 2008, 3(1): 014001.
[14] 朱晖, 郑子浩, 杨志刚. 车尾水平收缩气动减阻的规律及机理[J]. 同济大学学报(自然科学版), 2017,45(9): 1377.
ZHU Hui, ZHENG Zihao, YANG Zhigang. Regulation and mechanism of aerodynamic drag reduction by horizontal tail contraction [J]. Journal of Tongji University (Natural Science), 2017,45(9): 1377.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
天然气与石油(2022年4期)2022-09-21
昆明医科大学学报(2021年12期)2021-12-30
北京航空航天大学学报(2021年6期)2021-07-20
英语文摘(2020年10期)2020-11-26
红领巾·探索(2019年6期)2019-08-01
学生导报·东方少年(2019年28期)2019-01-17
劳动保护(2018年5期)2018-06-05
无人机(2017年10期)2017-07-06
中国卫生(2014年11期)2014-11-12
