
高铁牵引变电所智能联动调度监控实验平台建设
2018-07-03 07:16屈志坚周锐霖袁慎高孙旭兵
实验技术与管理 2018年6期
屈志坚, 周锐霖, 袁慎高, 孙旭兵
(华东交通大学 电气与自动化工程学院, 江西 南昌 330013)
随着智能电网建设水平的提升,无人值守牵引变电所在我国高铁沿线逐渐普及,因此需要引入大量监控设备来确保铁路沿线牵引动力负荷的可靠供电[1-3],已有牵引变电所监控系统大多单独立项,设备间相互独立、分散管理,需要值班人员花费大量精力来收集、分析和处理多源广域故障报警信息[4-5]。牵引变电所智能监控系统遵循“无人值班,少人值守”原则实现了视频监控、消防报警、照明控制、周界防范、微机远程监控等系统的一体化集成[6],让原本相互独立的系统按照预先设置的逻辑顺序进行联动,可以将事故危害降至最低。
针对高铁牵引变电所智能联动调度监控技术在工程应用中刚刚起步[7],学校缺乏相关教学实例及实验设备的状况,课题组在我国卓越工程师教育培养计划支持下,依托江西省轨道交通电气化与自动化工程研究中心,与北京太格时代自动化系统设备有限公司合作建成了拥有先进技术装备的铁道供电综合调度监控实验室,配备了以网络高速球机和各类传感器为核心的环境监控实验系统,并通过SQL数据库与原有远动监控实验平台进行智能联动,使学生能够通过实验掌握系统操作方法及工作原理[8-10]。
在实验平台后期建设中,课题组计划将铁路行业实习实训与学校优质的理论教学融合在一起[11-12],培养一批具有良好工程素养的轨道交通电气化领域技术人才,实现人才培养与企业就业的无缝衔接[13]。
1 传感器选型
1.1 热释电红外传感器
防范外来人员入侵是保障牵引变电所安全运营的基本要求。热释电红外传感器接收人体辐射出的红外线并产生一个电压信号,作为判断是否有人入侵的依据。该器件具有功耗小、响应速度快、抗干扰特性强的优点,可以作为牵引变电所周界防范系统的底层数据采集部件。其结构如图1所示。
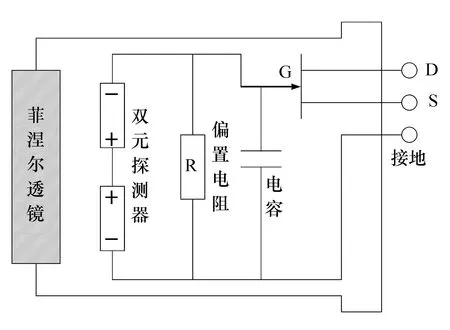
图1 热释电红外传感器内部结构图
热释电红外传感器前端安装的菲涅尔透镜通过特殊光学原理将波长在8~14 μm之外的红外线滤除,而人体辐射出的10 μm红外线则能通过透镜照射到双元探测器上。双元探测器由两块反向串联的热释电晶体组成,可以抵消环境温度变化产生的热释电流,同时受铁电体极化特征影响,人体移动产生的交变红外线照射则会使热释电晶体表面温度不断变化,并在元件两端表现出电荷释放的现象,电荷信号不能直接使用,需要被阻抗高达104MΩ的偏置电阻放大为电压信号,并经源级跟随器阻抗匹配后才能从S端输出。
1.2 散射式光电感烟火灾探测器
目前常用的感烟火灾探测器主要分为离子式感烟火灾探测器和光电式感烟火灾探测器两大类,由于前者在工作时带有一定放射性,并且需要定期更换镅源,给回收工作带来诸多麻烦,因此本文选用散射式光电感烟火灾探测器作为消防报警系统的底层数据采集部件,其结构如图2所示。
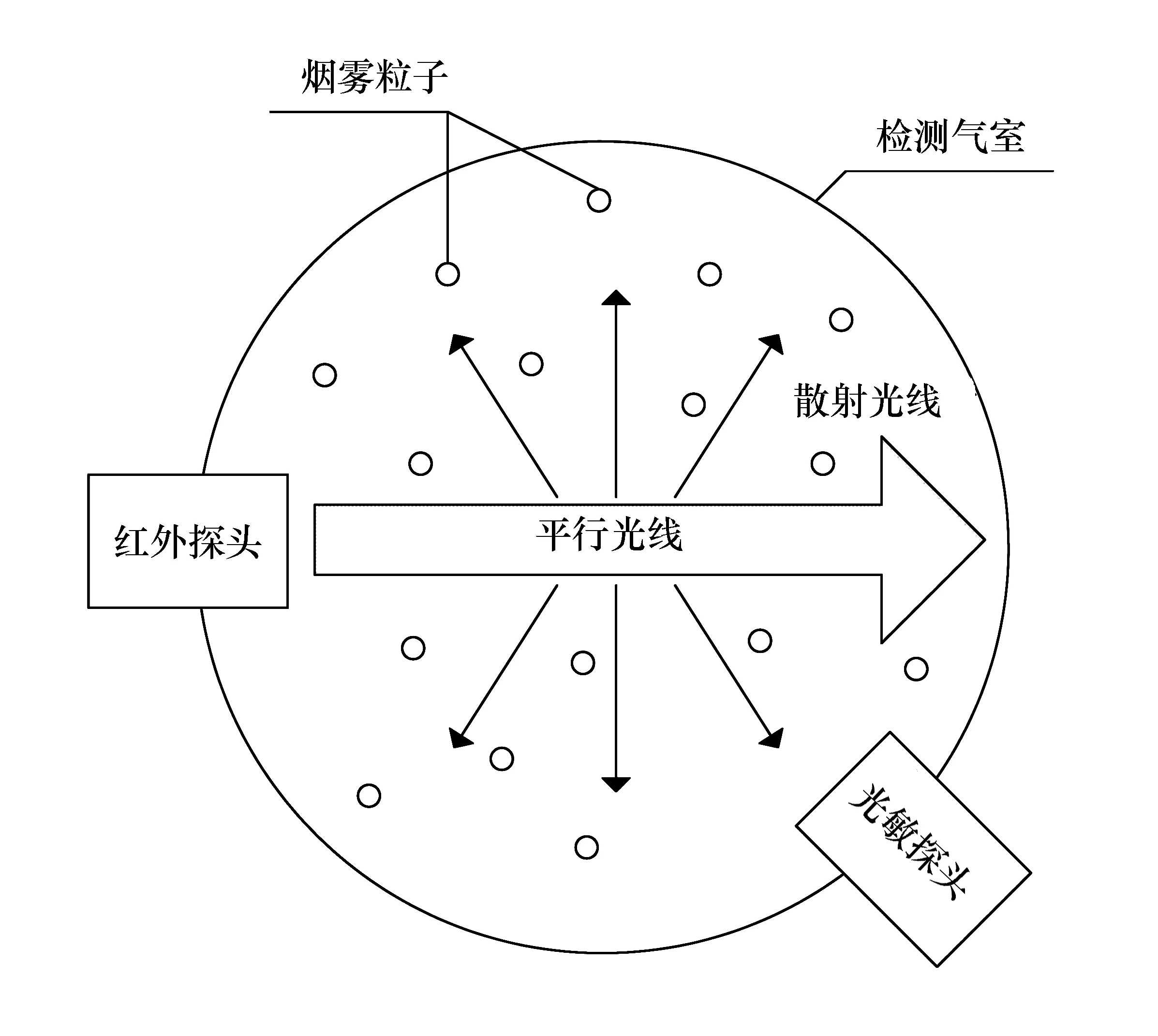
图2 散射式光电感烟探测器结构图
散射式光电感烟火灾探测器是依据光线通过气溶胶粒子时,部分光线会向多方面改变方向的原理制成的。在探测器检测气室内安装有一个红外探头和一个光敏探头,在正常情况下,红外探头发出的平行光束不会照射到光敏探头上,而当火灾发生时,大量烟雾粒子将涌入检测气室,因此平行光束会被散射至光敏探头上,从而产生光电流,驱动后续报警模块工作。
1.3 热电偶温度传感器
牵引变电所一次设备在长期承受大电流过负荷冲击的情况下,还要经受风雨、酷暑、严寒等恶劣自然条件的考验,为了防止因氧化、过载或故障导致高压设备接头处或导线温度过高,需要对设备运行温度进行监测。本文在穿墙套管线夹、隔离开关电连线夹等处布置热电偶温度传感器采集设备运行温度。
“热电偶”是由不同材料的导体A和B组成的闭合回路,在A、B的结点上会因自由电子扩散而产生接触电动势,如图3所示。
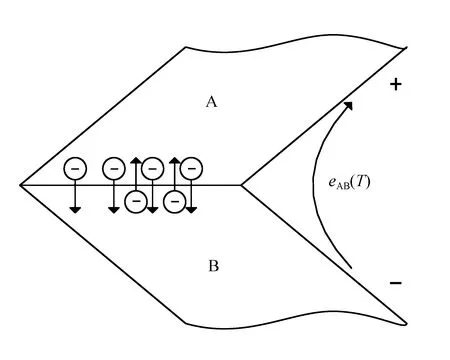
图3 接触电动势产生原理图
自由电子从密度大的金属A处扩散到密度小的金属B处,从而在A、B之间产生一个场强不断增大的电荷空间,促使自由电子做从B到A的反向漂移运动,直到自由电子的扩散与漂移达到动态平衡。在金属A、B结点处的电动势产生eAB(T)的表达式为
(1)
其中:T为接触处的热力学温度;k为玻尔兹曼常数,k=1.38×10-23J/K;e为电子电荷,e=1.6×10-19C;nA和nB分别代表金属A、B的自由电子密度,满足nA>nB。
热电偶有2个结点,置于被测温度T处的结点被称为测量端,置于参考温度T0处的结点被称为参考端,如图4所示。
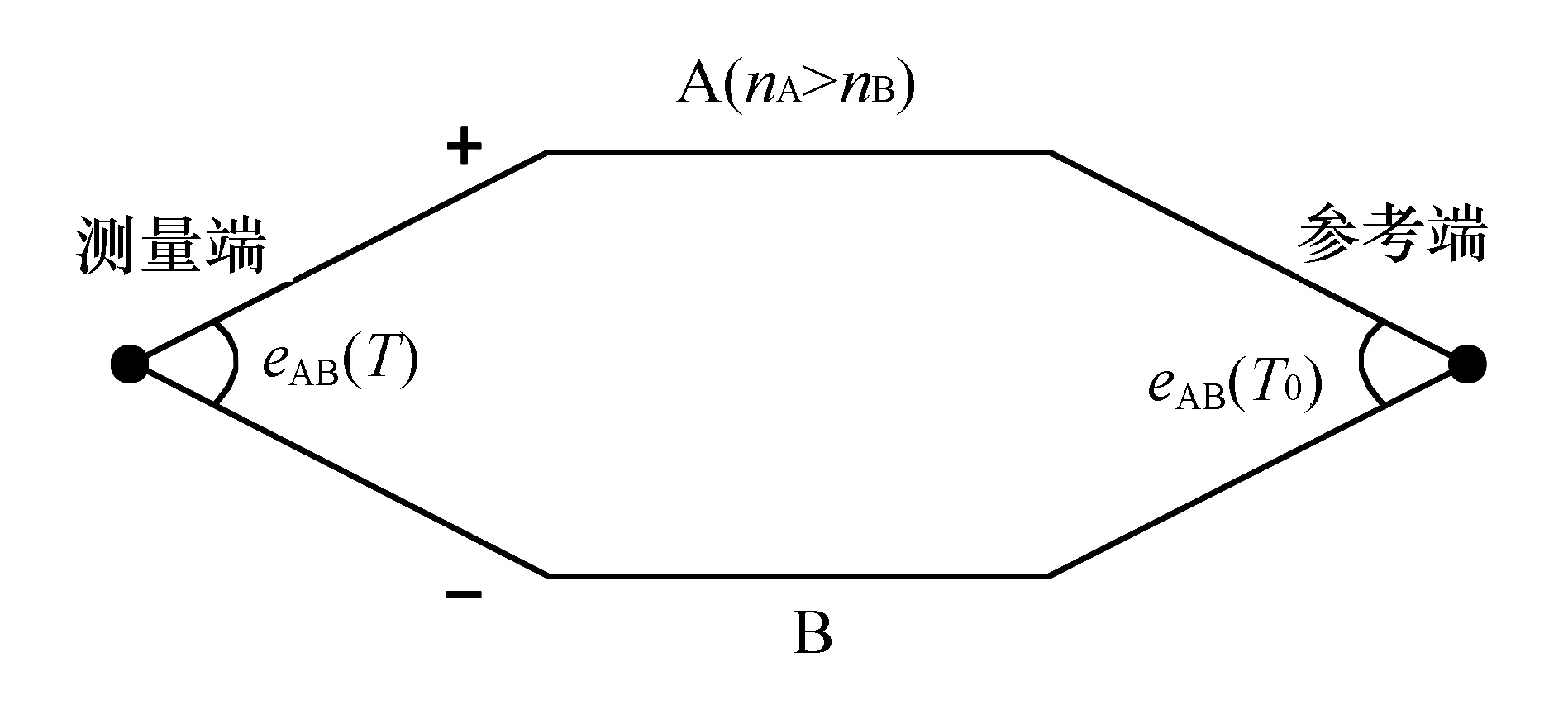
图4 热电偶结构图
由于两结点温度不同,产生的接触电动势也不同,因此将在两结点间形成热电动势EAB(T,T0):
EAB(T,T0)≈eAB(T)-eAB(T0)
(2)
(3)
国际计量委员会通过多次精密测试,公布了8种通用热电偶在参考端温度T0为0℃时,测量端温度T与输出热电动势EAB(T,0)之间的对应关系表,计算机依据该表反推测量端温度值,判断温度是否超标。
2 智能联动调度监控实验平台架构
2.1 远动监控实验系统
针对牵引变电所的选址是由地理条件及铁路网延伸方向决定,站所与站所间、站所与供电调度指挥中心间相隔十分遥远的现实情况,为了实现对广域分散的电力生产过程的集中监视与控制,并让学生进一步了解掌握远动系统的工作原理及操作方法,学校在铁道供电综合调度监控实验室内搭建了基于分层式网络结构的远动监控实验平台。该平台包括调度指挥中心、数据传输通道和远动测控终端3部分,其基本结构框图见图5。
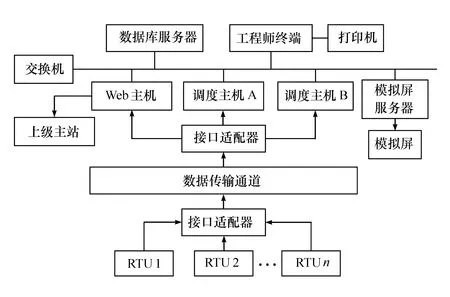
图5 远动监控实验系统结构框图
RTU是调度指挥中心与本地执行机构进行通信的“中转站”,一方面,它将采集到的设备运行模拟量、开关量通过铁路专用数据通道传输到指挥中心,供值班人员参考;另一方面,它接收来自中心的遥控命令,实现对设备的功能控制。
调度指挥中心由调度主机、工程师终端、数据库服务器、模拟屏工作机、打印机5部分组成,主要功能如下:
(1) 调度主机是调度控制中心的核心部件,可以采集RTU中的数据,并在模拟屏上实时显示现场监控画面、遥测曲线图、事件报警信息及日生产报表和月生产报表,使值班人员能够清晰直观地了解牵引变电所内一、二次侧设备工作状态。在调度控制中心内应至少设置2台调度主机和1台WEB主机,调度主机间互为热备,以保证系统运行地安全性和稳定性,WEB主机则向上级主站提供复示信息浏览服务。
(2) 数据库服务器中存储了全所设备的历史运行数据,包括电压、电流遥测数据、开关量变位等事件顺序记录、事故报警信息以及遥控操作记录等,是实现远动监控实验平台过程监视、故障检测与诊断、现场设备运行控制及参数调整等功能的基础。本文在数据库服务器上装载的是开源数据库MySQL。
2.2 环境监控实验系统
针对现有远动监控实验系统缺乏必要的可视化管理工具,且无法对温度、湿度、氟化硫气体浓度、火情等环境因素进行监控的问题,本文补充建设了以网络高速球机和各类传感器为核心的环境监控实验系统,该系统包含视频监控系统、周界防范系统、消防报警系统和电缆温度监测系统等,在后期工作中拟追加建设照明控制和氟化硫气体浓度监控等实验子系统,各子系统依照一定逻辑进行智能联动,可以将突发故障危害降至最低,系统基本框架如图6所示。
现场传感器首先将采集到的环境异常数据存储至主控室故障报警数据库服务器内,之后通过人工手动操作或系统自动触发联动逻辑,使相应控制器按照一定顺序及时间间隔执行动作,以维持所内工作环境平衡。具体联动逻辑有:
a:一旦接收到异常报警信号,照明控制系统自动打开,视频监控子系统命令网络高速球机巡航至报警预置点进行拍摄,以确认此区域是否确实发生灾情,在后续描述的联动逻辑中,该步骤作为第一步被省略;
b:当光电式感烟火灾探测器传来火灾报警,喷淋头洒水灭火,同时门禁系统关闭,方便室内人员疏散和消防人员进入灭火;
c:当热释电红外传感器传来人员入侵报警,门禁系统打开,防止人员进入牵引变电所进行非法活动;
d:当热电偶温度传感器传来温度异常报警,空调机打开以调节室内温度,同时门禁系统打开,防止冷气或暖气外泄;
e:氟化硫气体在高压电弧作用下会被分解为二氧化硫、硫化氢等有毒气体,对人体健康造成危害,因此布置电化学传感器对上述气体浓度进行监测,一旦浓度超标,抽风机打开,将毒性气体排出,同时门禁系统关闭,方便室内人员疏散。
其中,联动逻辑c、d与b、e对门禁系统的操作存在明显冲突,因此需要明确联动逻辑执行优先级。若事件集合{c,d}与{b,e}中有故障同时发生,则应优先响应{b,e}事件集,即关闭门禁系统,而忽略{c,d}中的门禁系统打开操作。若通过视频监控系统确认为误报警,可以手动中断联动任务。
3 实验平台应用案例
3.1 局域网通信的智能联动设计
智能联动调度监控实验平台在主控室内便可完成对全所设备运行状况的监测及联动命令的自动下达。根据其硬件分布地理范围有限的特点,本文搭建局域网实现系统各设备间的快速通信和数据共享,具有误码率低、成本低廉、结构简单的特点。周界防范智能联动硬件架构见图7。
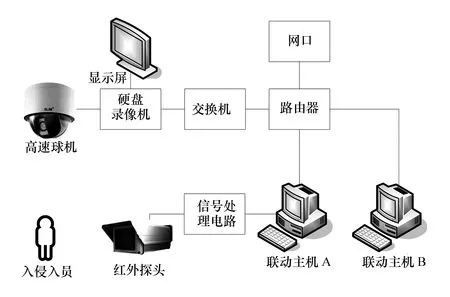
图7 周界防范智能联动案例硬件架构
除了能在本地显示屏上播放实时监控画面外,主控室联动主机A、B也能通过访问网络高速球机IP地址的方式进行距离监控或查询硬盘录像机中的历史视频图像数据。设备连接界面如图8(a)所示。联动主机A与B互连,以便将A中的入侵报警信息同步到B中,B在轮询到报警记录后会命令网络高速球机联动至相应位置进行拍摄,主机互接界面如图8(b)所示。
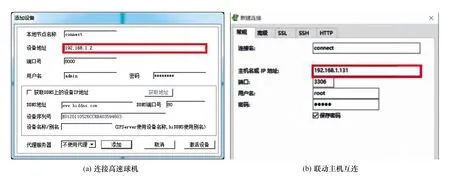
图8 局域网设备互连界面
至此,联动主机之间、联动主机与网络高速球机之间便能互相进行通信,为后续联动功能的实现奠定了基础。
3.2 周界防范联动实验
本实验以2人为一组展开测试,学生甲模拟外界入侵人员沿垂直于热释电红外探头方向做往返运动,学生乙依次打开联动主机A、B上的异常环境数据采集服务和联动逻辑服务,观察系统工作情况。
主机A收集热释电红外传感器传来的监测数据,并将入侵开始及结束信息过滤出来,插入到故障报警数据库中。入侵信息采集与插入如图9所示。
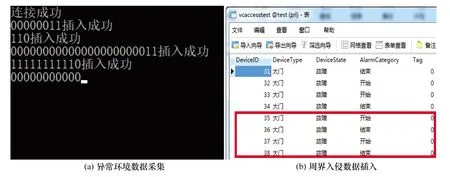
图9 入侵信息的采集和插入
主机B轮询故障报警数据表中,当记录为入侵开始信息时,命令高速球机联动至报警区域进行监控;当记录为入侵结束信息时,延时5 s使高速球机将监控对象切换为设备控制屏。周界防范联动测试效果见图10。学生甲、乙互换角色后进行第二次实验,步骤同上。

图10 周界防范联动测试效果
3.3 隔离开关联动实验
在对高铁牵引变电所内电气设备进行检修时,为了保障维护人员生命财产安全,需要将隔离开关断开,使待维修部分与带电部分之间形成足够大的空气绝缘间隔;而受锈蚀、受潮、冻冰、机构损毁等缺陷影响,隔离开关可能发生拒动或分合闸不到位的问题,因此在调度指挥中心下达“倒闸操作”遥控命令后,视频监控系统应使高速球机联动至隔离开关处进行拍摄,以确认分闸动作是否正确执行。
学生甲打开联动主机A上的远动数据采集服务,实时监测隔离开关分合闸操作开关量,每次分合闸操作都会被插入到故障报警数据库中。隔离开关分合闸信息采集与插入见图11。

图11 隔离开关分合闸信息的采集和插入
学生乙打开联动主机B上的联动逻辑服务,当轮询到故障报警数据表中隔离开关分闸记录时,命令高速球机联动至隔离开关处进行监控,当轮询到隔离开关合闸记录时,延时5 s使高速球机将监控对象切换为设备控制屏。隔离开关联动实验测试效果见图12。学生甲、乙互换角色后进行第二次实验,步骤同上。

图12 隔离开关联动测试效果
4 结语
本文依托江西省轨道交通电气化与自动化工程研究中心建设的牵引变电所智能监控实验平台,可以为轨道交通电气化专业的学生提供生动有趣的“高铁牵引变电所智能联动调度监控”实践教学环节,加深了学生对系统智能联动逻辑流程的理解,提高了学生的专业技能和工程素养。
[1] 郝福忠,吴广学,鱼滨.变电站辅助设备与环境监控系统设计与实现[J].电力系统及其自动化,2011,33(4):46-49.
[2] 贺威俊,高仕宾.轨道交通牵引供变电技术[M].成都:西南交通大学出版社,2016.
[3] 曹楠,李刚,王冬青.智能变电站关键技术及其构建方式的探讨[J].电力系统保护与控制,2011,39(5):63-68.
[4] 方景辉,徐伟明,朱晓峰,等.基于物联网与三维可视化技术的变电站智能辅助控制系统的研究与应用[J].电力系统及其自动化,2012,34(3):67-70.
[5] 贾浩,王哲.物联网技术在变电站辅助系统中的应用[J].电力科学与工程,2011,31(4):57-61.
[6] 王德文,肖磊,肖凯.智能变电站海量在线监测数据处理方法[J].电力自动化设备,2013,33(8):142-146.
[7] 浮明军,刘昊昱,董磊超.智能变电站继电保护装置自动测试系统研究和应用[J].电力系统保护与控制,2015,43(1):40-44.
[8] 李楠,张军,张俊丰.变电检修实训基地建设的研究与实践应用[J].中国电力教育,2017(8):44-47.
[9] 傅钦翠,陈剑云.采用libiec61850和IEDScout构建智能变电站实验平台[J].实验技术与管理,2017,34(7):132-135,151.
[10] 刘宏达,徐颖,王科俊,等.电气控制综合实验平台设计与探索[J].实验技术与管理,2016,33(5):69-73,77.
[11] 屈志坚,王冬.面向智能调度监测的流计算并行滑动窗口技术[J].电网技术,2016,40(7):2219-2229.
[12] 韩小军.基于事件仿真的变电站辅助监控系统联动测试研究与实现[D].成都:电子科技大学,2014.
[13] 龚钢军,孙毅,蔡明明,等.面向智能电网的物联网架构与应用方案研究[J].电力系统保护与控制,2011,39(20):52-58.
猜你喜欢
智能建筑电气技术(2021年6期)2021-03-28
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
海峡科技与产业(2016年3期)2016-05-17
电源技术(2015年5期)2015-08-22
