智能导盲辅助系统的设计与实现★
2018-07-03 01:03武慧荣董冠廷曾婉玉
山西建筑 2018年14期
姚 丽 武慧荣* 卢 俊 王 睿 董冠廷 曾婉玉
(1.东北林业大学交通学院,黑龙江 哈尔滨 150040; 2.东北林业大学信息与计算机工程学院,黑龙江 哈尔滨 150040; 3.东北林业大学机电学院,黑龙江 哈尔滨 150040)
根据我国《视力残疾评定手册》,将视力残疾分为全盲和低视力两类。全盲即为完全失去视力以及光感,而低视力对光感还存在着微弱的感知度,这意味着通过一定的辅助设备,可以帮助低视力人群利用光感识别周围环境信息。目前,盲人日常出行主要通过触觉感知盲道砖确定前进方向,靠盲杖探测前方道路是否畅行,但仍然会存在盲道被占用而影响盲人安全出行的问题,传统的导盲杖已经无法满足当前盲人的出行需求。针对这一问题,电子辅助导盲系统的研制层出不穷,有基于超声波的导盲系统[1]、多传感器融合技术的导盲系统[2],基于GPS技术及北斗卫星导航系统的导盲系统[3-5]。现有导盲系统在一定程度上辅助了盲人的出行,但却无法对障碍物进行筛选更无法判断障碍物的具体类别。
本文利用图像处理和深度视觉技术,辅助盲人从听觉和视觉两方面获取障碍物信息,对于低视力群体可以增强从视觉方面感知障碍物信息,全盲人群则可通过语音提示,解决他们的行走避障问题。
1 系统总体方案设计
1.1 系统功能
根据所提出的辅助盲人从听觉和视觉两方面获取障碍物信息,该电子导盲辅助系统具有以下功能:
1)实时识别前方盲道上的障碍物;
2)快速判断障碍物类别信息;
3)通过语音提醒盲人相关的避障信息;
4)增强深度图像的色感,使低视力者能够感知图像。
1.2 功能模块设计
系统采用图像识别和深度视觉技术,实现为不同视力残疾群体提供图像和语音提示信息,辅助盲人安全出行。其总体框图如图1所示。
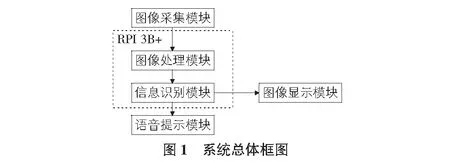
1)图像采集模块。通过图像采集模块,可以模拟人眼采集一定视角内的环境图像,帮助获取盲人所处方位的环境信息,并对该信息进行筛选处理,传输到图像处理模块。
2)图像处理模块。盲人所处方位的环境图像在该模块进行筛选和识别,可以得到环境图像中的障碍物和盲道信息,传递给信息识别模块。
3)信息识别模块。信息识别模块通过对图像处理模块获得的障碍物图像进行数据库信息对比,获取障碍物的具体信息,传递给语音提示模块和图像显示模块。
4)语音提示模块。实现字符数据的语音转换,将信息识别模块识别的物体类别信息转换为语音信息,并将提示信息传递给盲人。
5)图像显示模块。低视力者可通过强烈的色彩对比感知物体信息,图像显示模块主要用于呈现信息识别模块处理后获得的深度视觉图像,辅助低视力者辨识物体。
2 硬件系统设计
2.1 图像采集模块
该模块由深度摄像头、普通摄像头等组成。普通摄像头可以实时采集盲人所处位置前方的环境图像,通过模拟人体视觉以获得准确的障碍物距离信息,并将获取的图像通过有线高速传输到图像处理模块。通过对比不同型号摄像头及其特征参数,考虑到装置的适配性以及摄像头的价格因素,本系统选择树莓派定制摄像头5MP RPI CAMERA。
深度摄像头由双目摄像头、红外光源、收光器件组成,采用双目立体视觉,配以红外结构光辅助投影,能够获得比传统立体视觉更多的景深细节,所有图像处理均在设备端高速完成,直接输出深度数据。将处理过的图像投射在图像显示模块,令低视力者可以看到前景物体的形状和大小并且区分前景物体和背景物体。为避免装置之间深度信息相互干扰,本系统选择Kinect结构光3D双目视觉摄像头。
2.2 信息处理模块
信息处理模块主要基于RPI 3B+开发板实现盲道识别、障碍物识别以及获取障碍物信息。RPI开发板方便编程、容易改造、易发挥创造力且价格低廉,具有很好的开发性,主板上预留的接口可直插与系统相适配的摄像头、微型USB电源等。
2.3 语音提示模块
由耳机、麦克风、音频处理单元组成,与图像处理模块相互连接进行数据传输。主要用于将服务端传输的字符数据转化为语音信息,通过盲人的听觉功能建立起导盲系统与盲人使用者的联系,提醒盲人前方障碍物信息。
2.4 图像显示模块
该模块硬件构成为3.5寸HDMI接口IPS显示屏,IPS显示屏视角更广,色域更广,响应速度快。显示屏与RPI开发板相连接,可以实时呈现处理后的深度图像,以便于低视力者利用微弱的视觉功能识别周围环境信息。
3 系统软件实现
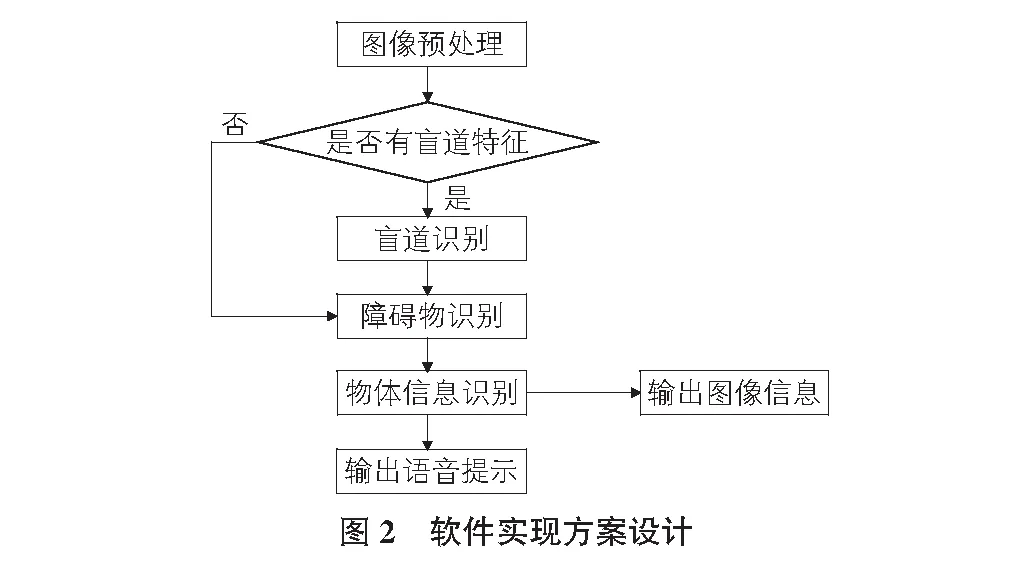
系统功能的实现需要软硬件相结合,利用图像处理算法对采集到的图像进行处理,识别出图像中的盲道区域、障碍物及其具体信息,实现语音信息及图像信息的输出,软件实现方案如图2所示。
3.1 盲道识别的实现
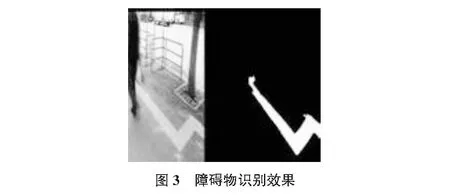
盲道砖颜色一般不同于人行道砖,通过使用颜色分割算法[6],可以将图像中黄色区域识别出来;识别后的图像经过图像二值化算法处理后,盲道区域显示为白色,再次使用区域生长算法,可将识别到的盲道区域中的噪点用白色填充。其识别效果如图3所示。
3.2 障碍物识别的实现
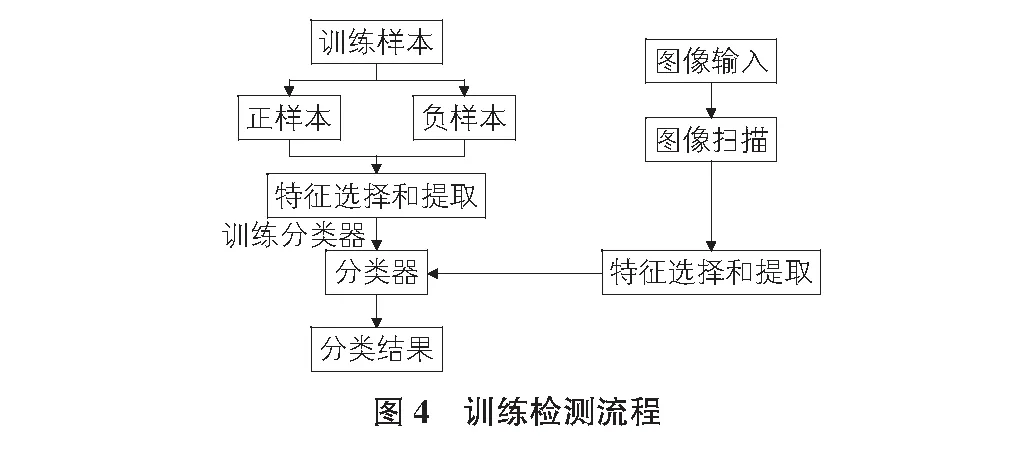
通过使用Opencv框架自带的特征集训练器训练Haar特征集和AdaBoost算法进行障碍物识别。具体训练检测如图4所示。
3.3 物体信息识别实现
通过无线传输模块将截取的障碍物图像上传至服务器,服务器将提取截取图片中的特征点,并与数据库中的特征数据进行比对之后获得物体的具体信息,同时将信息返回客户端,用户可以通过耳机接收物体的具体信息。
4 结语
面对传统的导盲杖已经无法满足当前盲人的出行需求这一现状,本文分析了不同视力残疾群体的特征,设计了满足不同群体需求的智能导盲辅助系统,从听觉和视觉两方面同时向盲人传达导盲信息。系统采用深度视觉技术获取景深图像,RPI 3B+开发板进行信息处理,设计了智能辅助导盲系统,帮助盲人实时识别盲道区域、障碍物及获取障碍物具体信息,增强盲人的视觉感知及出行安全度。随着图像处理技术发展,将更好地获取视力障碍者行进前方的三维空间信息,将会不断提升和完善智能导盲系统的功能。
参考文献:
[1] 孙 新.基于超声波的盲人避障眼镜的设计[J].电子技术与软件工程,2014(12):171-172.
[2] 李长昆.基于多传感器信息融合的智能化手杖[J].电子制作,2018(1):33-35.
[3] 廖庆洪.基于GPS技术与智能避障的导盲拐杖研究[J].电子技术研发,2016,45(11):19-23.
[4] 刘 春,陈志濠,贺桂娇.多功能智能导盲手杖系统研究[J].无线互联科技,2017(7):44-45.
[5] 徐丝雨,唐 彪.基于北斗卫星导航系统的电子导盲犬的开发及应用[J].数字技术与应用,2017(2):92-93.
[6] 彭玉青,薛 杰,郭永芳.基于颜色纹理信息的盲道识别算法[J].计算机应用,2014,34(12):3585-3588,3604.
猜你喜欢
玩具世界(2022年3期)2022-09-20
客联(2022年3期)2022-05-31
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
青少年日记·小学生版(2019年2期)2019-09-02
测控技术(2018年10期)2018-11-25
小主人报(2016年2期)2016-02-28
中学科技(2015年8期)2015-08-08
小学生作文·小学低年级适用(2014年7期)2014-09-10