
环卫车辆水罐封头压型深度值对比分析
2018-07-02 08:43刘建培尹腾飞朱永智李斌
专用汽车 2018年6期
刘建培 尹腾飞 朱永智 李斌
河南森源重工有限公司 河南长葛 461500
1 前言
随着国民对环境质量的要求逐渐提高,市场上对洒水保洁类环卫车辆的需求日益增大,尤其是抑尘车、清洗车、洒水车等,而此类车型最为核心的部件应属载水罐体。罐体本体结构主要包括筒体、封头和防浪板,而封头的结构强度与刚度对罐体整体结构性能起决定性作用,因此对封头结构的设计与分析显得十分必要。传统的封头结构设计仅仅局限于封头的形状、尺寸等,而对于压型后封头的强度与刚度的分析,以及压型的深度对结构的强度与刚度的影响,仍鲜有讨论。本文采用有限元法,借用有限元分析软件HyperWorks,通过对某环卫车辆水罐进行全模型分析,旨在解决此问题。
2 物理模型
有限元分析结果的精确度随着物理模型完整度的提高而提高,而有限元分析需要的计算机资源和计算时间随着物理模型完整度的提高亦提高,其为相互矛盾体。结合本文的研究目的,尽可能保留罐体结构的完整性,简化对分析结果影响较小,而对资源和时间影响较大的结构,如:罐体顶部人孔、吊耳、行走平台和防护栏等[1]。本文重点研究封头的结构,故假定防浪板在筒体内均匀布置,简化后的罐体三维物理模型如图1所示,图2为罐体封头压型结构示意图。
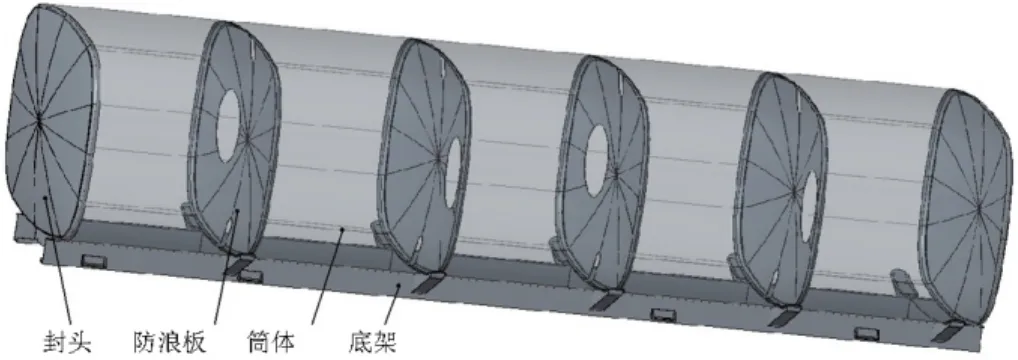
图1 罐体三维物理模型

图2 罐体封头压型结构示意图
本文分三种不同封头压型深度值M(如图2所示)进行对比分析,即M=80/100/125 mm,防浪板压型深度同封头保持一致,其余罐体参数保持一致。如表1所示为罐体关键参数。

表1 罐体关键参数
3 有限元模型
3.1 有限元法原理
有限元法的数学基础是变分原理和加权余量法,其基本求解思想是把计算域离散为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。
在有限元法中,把计算域离散剖分为有限个互不重叠且相互连接的单元,在每个单元内选择基函数,用单元基函数的线形组合来逼近单元中的真解,整个计算域上总体的基函数可以看作由每个单元基函数组成的,则整个计算域内的解可以看作是由所有单元上的近似解构成。
3.2 有限元模型建立
有限元模型的简化[2]:a. 不考虑液体流动对结构的影响,未采用流固耦合计算;b. 焊接和螺纹连接等连接对力和力矩传递可靠,且不考虑焊接过程对结构的影响;c. 加工和装配中参与应力的制造因素的影响被忽略;d. 承载区的载荷均布;e. 结构上的小圆角、倒角、工艺孔等工艺因素不予考虑。
在真实反映该罐体主要力学特性的前提下,尽可能地选取较少的节点和单元,对罐体结构的力学模型进行简化:a. 由于罐体绝大部分结构是由各种不同厚度的板材支撑,因此采用板壳单元模拟具有足够的精度,同时可以大大提高计算速度;b.因罐体本体各部件之间,以及罐体本体与支撑梁、紧固拉马等底架结构均为焊接连接,故对焊接部位采用共节点处理。
抽取罐体三维物理模型中面,采用壳单元进行网格划分,网格划分结果如图3所示,单元数量为679 349,节点数量为679 414。

图3 罐体有限元模型
4 边界条件
4.1 约束施加
罐体通过紧固拉马螺栓固定在底盘上,对紧固拉马螺栓孔周边节点约束其所有自由度,罐体纵梁下平面紧贴底盘纵梁上平面,约束其垂直于底盘上表面方向的移动自由度。
4.2 载荷施加
根据GB 18564.1-2006《道路运输液体危险货物罐式车辆第1部分:金属常压罐体技术要求》规定,罐体在运输工况中所承受的惯性力有以下四种:a. 纵向,即车辆行驶方向;b. 横向,即与车辆行驶方向成直角方向;c. 垂直向上;d. 垂直向下[2]。考虑环卫车辆实际工作状况并结合笔者从业经验,环卫车辆多在城镇作业,实际作业路面相对平稳,故情况c和d对罐体封头强度和刚度影响较小,本文在分析过程中予以忽略,只考虑情况a和b,其中情况a纵向方向可分为车辆启动与制动,而车辆启动与制动情况下的惯性力对罐体封头的作用效果是一致的,但车辆制动加速度远大于车辆启动加速度,故本文忽略车辆启动工况。罐体除了受纵向、横向加速度引起的惯性力外,还受结构自重G和罐体内部水的压力P0影响。
将罐体所受惯性力按照公式(1)转换为压力进行计算。

式中,P为施加压力, MPa;A为罐体在垂直于对应运动方向的投影面面积[3], 纵向方向为3.12×106,横向方向为9.54×106,mm2;a为罐体的加速度,纵向方向为6×103,横向方向为1.25×103[4], mm/s2,其他参数如表1所示。
5 计算分析
将建立的有限元模型,在HyperMesh中按照4.1、4.2所述,进行约束、载荷的施加,以及计算求解,得到不同压型深度的罐体在横向和纵向冲击作用下的应力与变形云图。图中应力单位为MPa,变形单位为mm。
Ⅰ、涨型深度M=80 mm罐体的应力与变形云图,如图4所示。

图4 80 mm深度的罐体在横向和纵向冲击作用下的应力与变形云图
Ⅱ、涨型深度M=100 mm罐体的应力与变形云图,如图5所示。
从以上分析结果可以得知:
a. 罐体在横向方向工况下的最大应力点在罐体与支撑梁结合处,而罐体在纵向方向工况下的最大应力点转移到封头与筒体结合处,且大片应力区域位于封头下半部分,此两处在焊接过程应特别注意保证焊接质量;
b. 横向、纵向两种工况下,罐体最大变形位置均为封头中、下部位;
c. 压型深度在80 mm、100 mm和125 mm条件下,罐体纵向最大应力分别为240 MPa、178 MPa和165 MPa,最大变形量为13.9 mm、6.5 mm和3.75 mm,可见罐体最大应力和最大变形量随着封头压型深度的增加而减小;

图5 100mm深度的罐体在横向和纵向冲击作用下的应力与变形云图
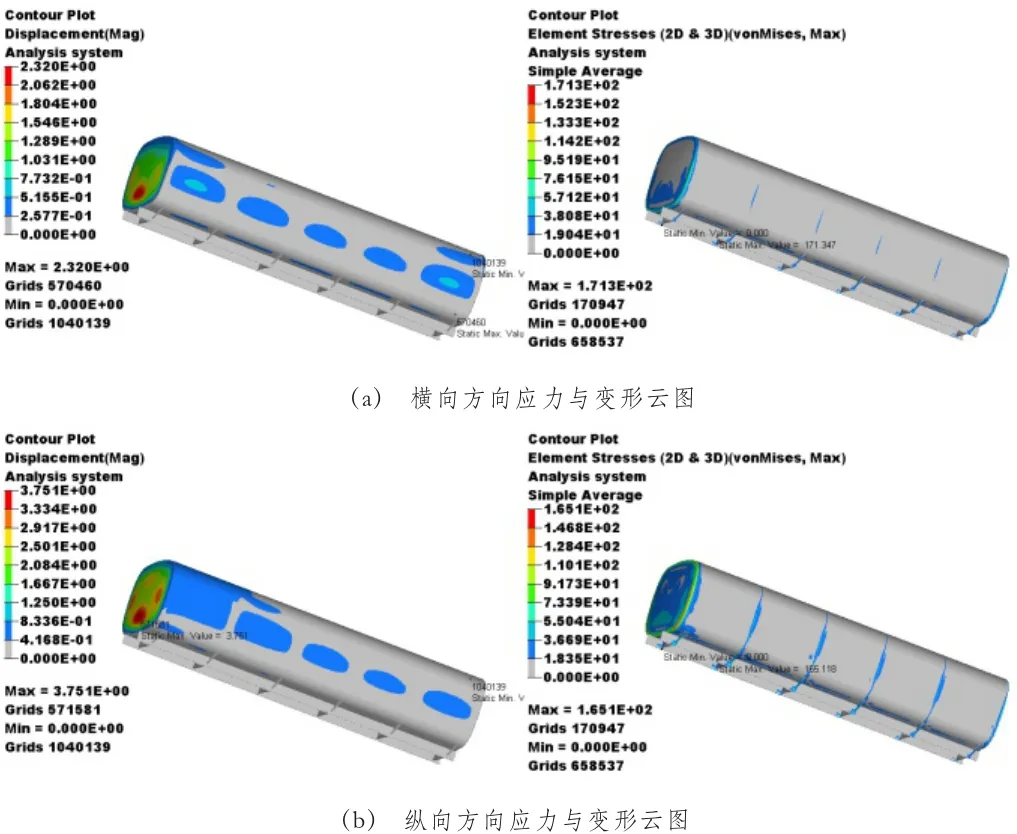
图6 125 mm深度的罐体在横向和纵向冲击作用下的应力与变形云图
d. 在压型深度为80 mm条件下,罐体的最大应力已超过了材料的许用应力,而在压型深度为100 mm和125mm条件下,罐体最大应力分别为17 8MPa(安全系数1.3)和165 MPa(安全系数1.4),均满足强度要求,但考虑压型模具的制作成本及封头压型后回弹量控制的难易程度,应在满足结构性能要求范围内,尽可能地减小压型深度值。
6 结语
a. 通过对环卫车辆水罐全模型的有限元分析,得出罐体在不同工况下的最大应力和最大变形的位置。设计时,可在受力和变形最大部位进行局部加强;加工时,应在受力和变形最大部位进行重点指导;
b. 罐体封头压型深度的不同直接影响着罐体的强度与刚度,罐体最大应力和最大变形量随着封头压型深度的增加而减小;
c. 罐体整体强度与刚度性能随着罐体封头压型值的增大而提高,但考虑实际压型模具的制作成本及封头压型后回弹量控制的难易程度,应在满足强度和刚度要求范围内,尽可能减小压型深度值。
d. 运用有限元法对环卫车辆水罐进行结构性能预估,可以大大缩短开发周期,提高一次设计成功率,降低生产成本。
[1]刘建培.汽车轮边减速器系统耦合动态特性分析及动态响应优化[D].重庆大学硕士学位论文,2014.
[2]GB 18564.1-2006道路运输液体危险货物罐式车辆 第一部分:金属常压罐体技术要求[S].
[3]翟绘军,李红.罐体承载式液罐车罐体结构强度的有限元分析[J].扬州大学学报,2010,13(3):74-78.
[4]刘洋,覃先云.环卫车辆矩形水箱的CAE结构分析[J].建设机械技术与管理,2013,21(1):85-88.
猜你喜欢
中国特种设备安全(2022年8期)2022-11-20
天津建设科技(2022年1期)2022-03-07
防爆电机(2022年1期)2022-02-16
大型铸锻件(2022年1期)2022-02-12
防爆电机(2021年2期)2021-06-09
课程教育研究(2021年10期)2021-04-13
昆钢科技(2021年6期)2021-03-09
火箭推进(2020年6期)2021-01-05
科技创新与品牌(2020年7期)2020-07-29
当代化工(2019年9期)2019-12-02
