
基于RFID的大型停车场泊车导航系统的设计
2018-06-29 06:00马依婷贾小林李春燕郭成涛顾娅军
物联网技术 2018年6期
马依婷,贾小林,李春燕,郭成涛,顾娅军
(1.西南科技大学 经济管理学院,四川 绵阳 621002;2.西南科技大学 计算机学院,四川 绵阳 621002)
0 引 言
随着汽车数量的增长,公共停车场的停车位数量越来越紧张,虽然大部分停车场都可提示用户是否有停车位,但由于停车场面积较大,找到停车位的时间较长,地下(多层)停车场为了缩短车主的停车用时需投入较多人力提示车主;车主取车时,由于忘记停车地点,会给车主带来更大的困扰。因此,如何高效使用有限的停车位,方便用户停车、取车,是各级停车场管理部门所需解决的问题。根据市场调研,现有的智能停车场管理系统普遍以智能IC卡管理系统或车牌识别系统为主(少部分采用RFID射频技术和蓝牙技术),实现停车场进出口的智能识别,将车位和车辆绑定以方便客户取车。
针对当前大型停车场停车难、取车难的现状,利用物联网、RFID等关键技术设计了一种基于地图构建、导航,以及车位分配的泊车导航系统。该系统具有路径规划、全程引导、停车定位、反向寻车、手机导航(可选)等功能,提升了大型车库的利用率和停车效率,具有管理成本低、智能化水平高、成本低廉、性能稳定的特点。相较于其他类似的停车场系统,该系统最大的优点是无需安装手机程序,也可实现停车场内导航停车、取车,适合大型停车场使用,方便简洁。
1 系统涉及的关键技术
1.1 RFID网络
射频识别(Radio Frequency Identification,RFID)俗称电子标签,其工作原理是标签进入磁场后,接收读卡器发出的射频信号,凭借感应电流所获得的能量发送存储在芯片中的产品信息;或者存储器主动发送某一频率的信号,解读器读取信息并解码后,送至中央信息系统处理有关数据。目前正在普及的电子车牌就是该技术的典型应用之一。
利用RFID技术构建车辆追踪和定位的网络,可获取任何进入停车场车辆的动态和静态位置信息,由导航系统完成车辆的引导泊车工作,由管理系统完成车辆与停车位单元的绑定和查询。
1.2 入口到最近的空车位路径算法
当车辆在入口被检测后,系统自动根据目前停车场内的空位,计算出从入口到空车位的最短路径,本系统采用Dijkstra最短路径优先算法。
2 系统设计综述
2.1 系统总体设计及重点
系统总体上分为底层驱动层、服务接口层、业务应用层三个大的层次。其中业务应用层主要包括出入场子系统、车辆定位子系统、车辆引导子系统、停车场地图信息子系统、停取车信息数据库管理子系统等,如图1所示。
在设计实现上,首先根据停车场具体的地理空间位置,建立数字化车位信息库和道路信息,构建地图系统。系统的重点和难点在于完成车辆的定位和追踪,在解决该问题的基础上结合地图与路径规划实现智能导航,车辆可以最优路径被引导到合理的空闲车位上,实现效率最大化。
2.2 出入场设计
停车场出入口的布置充分利用了现有停车场的设施。随着电子车牌技术的普及,只需在入口位置增加RFID读卡器及相关装置,就可读取电子车牌的信息,同时停车场入口的摄像头可拍摄入口处车辆的照片。照片发送到计算机后,经过相应的处理可获得各种信息,例如车牌号码、车辆颜色等,与读取的电子车牌信息进行比对,如果一致则放行,并将车辆信息存储在数据库内。电子车牌的ID 号是唯一的,且电子标签在场内被全程监控和记录。因此,客户信息、车辆属性信息、后期的停车位单元信息、车位引导和行驶路径、车辆的进出场时间及停放总时间、停车费等信息可对应起来,存放在数据库中,为实现智能化管理奠定基础。
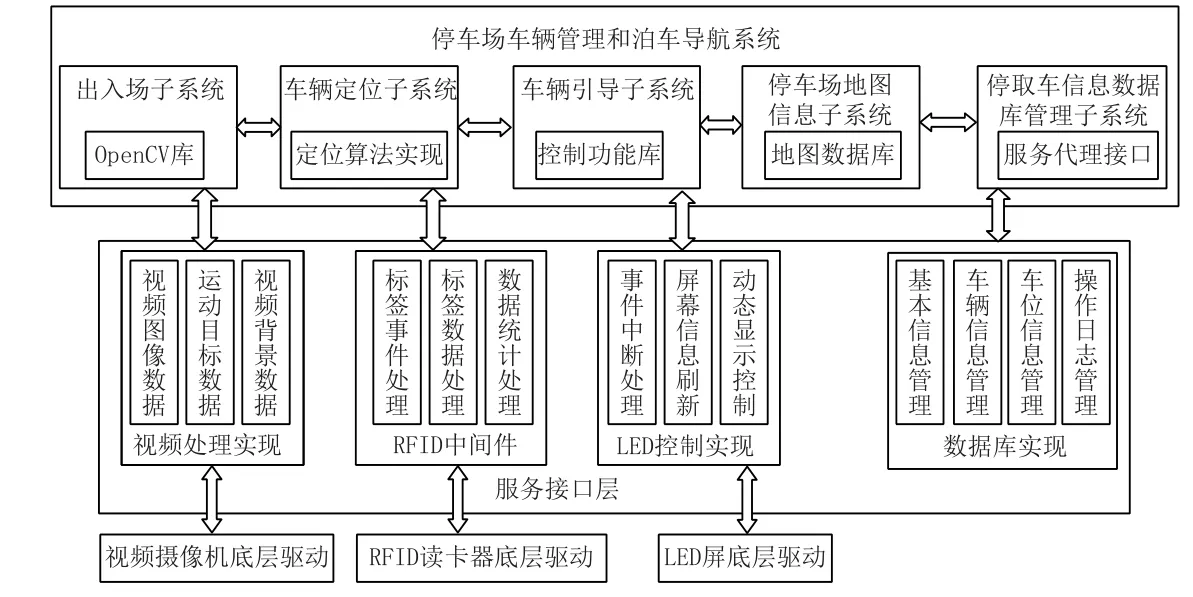
图1 泊车管理系统软件功能结构图
当车辆驶出停车场时,车牌识别系统将识别车牌,并将信息上传至停取车管理子系统,查询数据库中当前车辆进、出场的时间段,在核对之后调用收费模块计算并显示和收取停车费用,收费完成后抬杆放行。
2.3 定位系统设计
在不改变停车场现有布局的基础上,采用RFID技术对停车场分块监控。同一层停车场划分出不同的区域,对每一区域再划分不同的监控单元,针对停车位区域和行驶道路区域车辆的状态特征采用不同的监控方式,定位系统布局如图2所示。
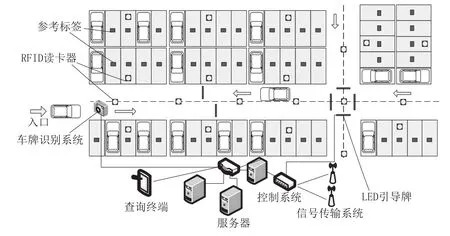
图2 RFID定位与LED引导布局示意图
2.3.1 停车位区域定位
在停车位区域划分监控单元,每个单元由若干连续的单排停车位组成,具体每个单元包含的停车位数量由停车区域实际的位置特征与监控设备的功能参数共同决定。每个监控单元上方使用一个RFID读卡器,由该读卡器完成对这一单元泊车信息的检测和上传,该监控单元也是系统进行反向寻车的最小单元,因此包含车位不宜过多。这样设计不能使每一辆车对应一个车位(一个泊车单元对应若干连续车位),但相距很近,因此并不影响客户寻车,同时也利于技术实现和降低成本。
以5个小型车停车位(2.2 m×5 m)为例,监控区域为5 m×11 m,设计读卡器参数如下:
(1)电源:200~220 V,50~60 Hz交流电;
(2)通信接口:TCP/IP,WiFi;
(3)发射功率:≤2 W;
(4)工作频率:902~928 MHz,ISM 频段(UHF);
(5)距离:0~8 m。
通过设计和实验确定信号强度RSSI阈值,凡在阈值以内(大于阈值)的可判定在有效区域内。
为了保证不同单元之间的有效隔离而不至于互相干扰和误判,通过实验确定读卡器的最优功能参数和位置参数,使有效区域外的RSSI值处在横向移动与RSSI相关曲线较为陡峭部分,这样有效区域外的标签很难被检测到,或即使被检测到,其RSSI值也远小于阈值,从而被剔除。由于停车位空间本身有物理隔离和限制,两个相邻监控单元之间也存在一个过渡空间不可能出现标签,因此充分利用该中间区域,设置合适的阈值,以不产生漏检为最低标准。
当两个单元横向相邻时,应将读卡器安装在靠近道路一侧,并调整读卡器角度,使相邻单元读卡器距离尽可能远而减少干涉。道路上行驶车辆的标签信息可通过RSSI的动态变化并结合参考标签状态(道路上行驶车辆不会导致参考标签RSSI值改变)来判断。为了降低误检机率,采用相邻单元进行比较的算法,但当标签信息同时出现在相邻单元的阈值范围内时,则通过对RSSI值的比较来确定(判定在RSSI值较大一侧区域)。
为了精确测定空车位信息,引入参考标签,在每个车位的地面中心部位安装一个参考标签,并测量和保存其RSSI值和标签ID(对应不同车位号),当有车辆进入和停泊时,其RSSI值会有明显变化,从而精准确定空车位信息,提供给空车位查询系统。当在一个或相邻单元内同一时刻仅有一辆车进入时,可以根据参考标签变化的信息绑定进入车辆,使进入车辆对应具体的车位。
定位系统可随时监测停车区域的车辆和车位状态,一旦停车单元内停车状态发生变化,可即时调用停车信息管理模块更改数据库信息,以便其他应用模块查询。
2.3.2 行驶区域追踪
依据道路实际宽度,在行驶道路区域划分监控单元。假设路宽5 m,单个读卡器监控有效范围为5 m×11 m,在道路上方每隔7 m安装一个读卡器,这样两个相邻监控区域有4 m的重叠区域,如果被两个相邻的监控区域都检测到(通过阈值判定是否在有效区域内),则可认为该车在此重叠区域内,如果由一个读卡器检测到,可以认为在此读卡器有效范围的中间3 m之内。按此设计,移动定位精度可达3~4 m。
道路上车辆处于行驶状态,根据车辆在连续周期内出现的区域可以确定汽车的行驶方向。道路旁的停车位上如果有车辆停泊,有可能被道路上方读卡器检测到,但其RSSI值不变,因此很容易判断为泊车状态而忽略。
车辆从进入某一个读卡器检测范围开始到离开,其RSSI检测值或相位检测值和行驶距离的关系是对称的非线性圆滑曲线,离中心点(即读卡器正下方)越近,RSSI值越大,变化率越小,在中心点达到峰值;在进入和离开时,RSSI值显著减小。结合对RSSI值的变化进行分析和计算,可以判断是接近中心点还是远离中心点,并能估算出大致所处的位置,进一步提高定位精度。
2.4 场内引导系统设计
场内引导系统在车辆定位系统、停车场地图信息、停车位信息数据库、LED显示系统的基础上通过路径规划来实现。引导系统对每一辆移动车辆进行追踪,根据移动车辆的实时位置、空闲停车位单元信息选择未分配的最近停车位单元,根据地图数据采用Dijkstra最短路径优先算法规划行驶路线,并及时反馈给行驶者。
在道路中途以及路口安装LED显示屏,用以显示引导信息。当检测到入场车辆的位置后,在距离该车辆前方最近的引导牌上显示指示信息,如“直行、左转、下一路口左转”等,并配以箭头提示,同时显示空位编号;如果有多辆车行进且路径不同,可提示多条信息,不同路径以不同车牌号区分。
如果检测到车辆从停车位驶出,则系统规划到各出口的路径,并在最近的引导牌上显示多个出口信息及相应路径和距离,客户选择相应出口驶离。
2.5 反向寻车设计
当车主不知道自己的车停在何处或者不知道停车场的情况时,都可以在入口或者在地下车库电梯附近的车辆查询触摸屏上输入车牌号,数据库将反馈车辆所在位置,并可以查看停车场平面图,在图上显示车辆所在位置和车主目前的位置,方便车主取车。
2.6 APP导航设计
为了满足客户使用手机进行停车导航的要求,以及适应停车场未来的发展和对统一平台的需求,设计并实现了基于安卓手机端APP停车场导航软件,以Java语言后台编码方式及HTML5面向对象的脚本语言加上MySQL数据库构建具有“跨平台性”的系统,其特点是融合场外GPS导航和场内WiFi导航,实现内部和外部导航的无缝对接。系统功能及使用流程如下:
首先通过 Android 手机端的泊车导航软件查询周边停车场的信息,包括停车场总停车位、空闲车位数目、停车费用收取情况及具体地址。选择合适的停车场后,将客户从当前位置导航到目标停车场。
在车主到达停车场入口时,车主将利用自己的 Android 手机通过 WiFi 接入方式与服务器建立连接,完成相应的身份和车辆信息验证。在验证成功后停车场的服务器端将发送相应的空闲车位单元号和停车场内路线引导图到手机端,车主在引导下完成车辆的停放。在每个车辆完成停放时,定位系统会对车位状态进行更新并上传至服务器,更新相应数据库。最后,利用反向寻车功能,取回车辆,在出口处完成停车费用收取后离开停车场。
停车场泊车取车流程如图3所示。
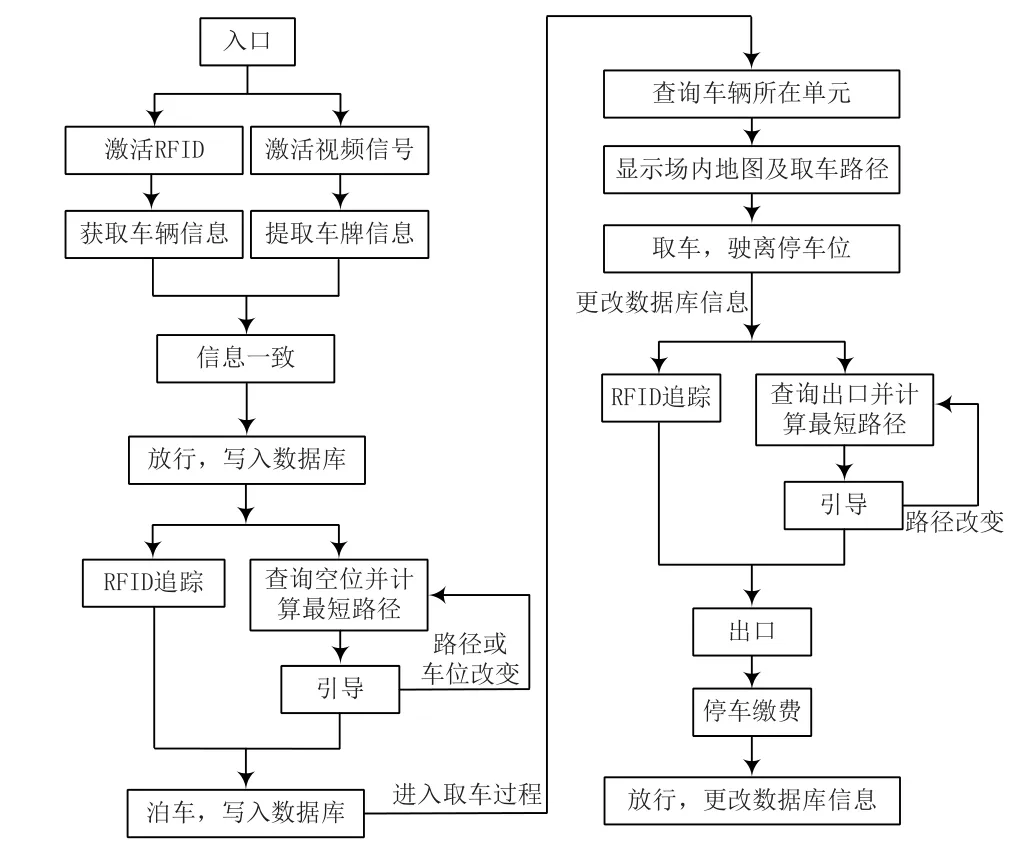
图3 停车场泊车、取车流程图
3 结 语
设计实现了基于RFID网络定位和多种形式引导的大型停车场导航与管理系统,该系统从技术上来说:充分利用了RFID的技术优势,很容易随时获取车辆信息和监控车辆位置信息;RFID网络的构建提升了RFID的应用,极大地提高了车辆定位的精准度,实现了全区域无死角监控,为车辆追踪和导航提供了即时和准确的信息;优选路径算法的应用和多种形式引导最大限度提升了停车、取车的效率和用户体验;从市场角度来说充分利用了停车场现有的资源,在此基础上进行尽可能少的改造,并且不增加车主的任何负担,无需取卡操作以及增加额外的标签;电子车牌只读取车辆本身的信息,而不涉及个人隐私;无需手机支持等,极大地方便了用户停车,也减少大量的人工费用,实现了社会效益和经济效益的充分结合,是具有极好市场前景的技术应用和设计创新。
[1] JIA X L,FENG Q Y,MA C Z.An efficient anti-collision protocol for RFID tag identification [J]. IEEE Communications Letters,2010,14(11):1014-1016.
[2] JIA X L,FENG Q Y,YU S L.Stability analysis of an efficient anticollision protocol for RFID tag identification [J]. IEEE Transactions on Communications,2012,60(8):2285-2294.
[3]郑坤.基于RFID的车辆定位系统设计及定位方法的研究[D].长春:吉林大学,2016.
[4]贾小林,冯全源,雷全水.基于碰撞树的多周期RFID标签识别碰撞算法研究 [J].西南科技大学学报,2014,29(1):29-44.
[5]陈婷.基于RFID定位的停车场智能移动终端设计 [D].南京:南京邮电大学,2016.
[6]曾党泉.基于RSSI值的室内定位系统的比较研究[J].物联网技术,2016,6(9):23-25.
[7]申晓龙,申晓凤.基于RSSI的室内定位关键技术研究[J].物联网技术,2017,7(8):19-21.
[8]赵吉清,王根平,易灵芝.基于射频识别技术的停车场无线定位系统设计[J].计算机测量与控制,2007,15(9):1209-1211.
猜你喜欢
汽车画刊(2020年5期)2020-10-20
英语文摘(2020年7期)2020-09-21
祝您健康·文摘版(2020年3期)2020-04-09
数学小灵通(1-2年级)(2019年5期)2019-05-21
自然资源情报(2018年7期)2018-12-28
遵义(2018年13期)2018-08-08
现代家长(2018年11期)2018-01-05
中国公共安全(2017年11期)2017-02-06
武夷学院学报(2015年3期)2015-07-18
