基于SMA驱动模块的仿生水母机器人
2018-06-28 08:14,,,,
机械与电子 2018年6期
,, , ,
(中国科学技术大学工程科学学院精密机械与机密仪器系,安徽 合肥 230026)
0 引言
在过去几十年里,越来越多的学者关注软体机器人的研究,尤其是在仿生软体机器人方面,如仿生蚯蚓机器人、章鱼机器人、仿生机器鱼和象鼻机器人[1-4]等。相比于传统机器人,仿生软体机器人采用聚氨酯、高分子材料和橡胶聚合物等柔性材料作为基体,使用少量甚至不使用刚性结构,保证了机器人高仿生性的同时,拥有较高的安全性、灵活性,并能更好地在非结构化环境中运动。以美国为代表的西方国家从20世纪50年代就开始了水下机器人的研究[5-6],早期的水下机器人以特定功能的水下无人机为主,如深潜机器人、潜艇救生机器人,这类机器普遍存在结构复杂、噪音大、维护难和成本高等问题,一定程度上限制了其应用。20世纪后期以来,随着智能驱动材料[7-9]研究的深入,一系列基于此类材料的仿生水下机器人被设计出来[10-11],这类机器人具有高效率、低噪声、高机动和高速等优点,受到国内外学者广泛的关注。
水母作为最古老的海洋生物之一[7],适应绝大部分海洋环境,具有简单、柔韧的身体结构,游动能量利用率高,噪声低,成为水下仿生研究对象中的明星[10]。获取水母运动诸多优点最简单的方式就是模仿它的结构和推进方式,目前国内外学者在仿生水母机器人研究方面做了很多工作[10-11],但这些工作主要集中在水母机器人的运动的实现,忽略了水母机器人的游动性能,这些水母机器人存在游速慢、体积小、需要外接电源、运动模式单一等不足。
在此,通过改进SMA驱动模块的结构参数和制造工艺,提出了一种新的水母机器人的设计方案和控制策略。
1 设计与制作
1.1 SMA驱动模块
随着材料科学的发展,越来越多基于智能材料柔性驱动器应用在机器人领域,如形状记忆合金丝驱动器(SMA)、电活性聚合物驱动器(EAP)、金属离子聚合物复合材料驱动器(IPMC)等,与采用电磁驱动来实现运动精度和负载要求传统驱动器相比,这些柔性驱动器具有较高的灵活性、兼容性和适应性。其中,基于SMA的柔性驱动器具有结构小巧、变形和力输出大、驱动方式简单,以及可控性相对较高的优点[12]。本文将采用SMA完成水母机器人驱动模块的设计制作。SMA驱动模块制作工艺流程如图1a所示,主要分为穿丝、装模浇注和粘贴回复板3个步骤,其中在装模时对SMA施加0.5%的预紧力,以保证驱动模块获得更大的弯曲角度。
SMA驱动模块长宽厚分别为100 mm,10 mm,2.5 mm,SMA丝与弹簧钢的距离为1.5 mm,有效长度为87 mm,由驱动层、回复层和填充层组成。驱动层为2组固定安装在PCB上的SMA(直径为0.15 mm,相变温度为90 ℃,最大变性收缩率为4.5%),SMA的加热时晶体组织会发生相变,产生的力和位移输出;回复层为厚度为0.1 mm的弹簧钢板,在驱动模块加热弯曲变形时,弹簧钢存储弹性势能,在驱动模块冷却时使其恢复到初始位置;填充层采用具有良好延展性的聚二甲基硅氧烷(PDMS)嵌合SMA和PCB,以减小驱动模块弯曲变形时反向压应力对该模块性能的影响。该驱动模块在电流作用下具有良好的弯曲变形性能,如图1b所示。
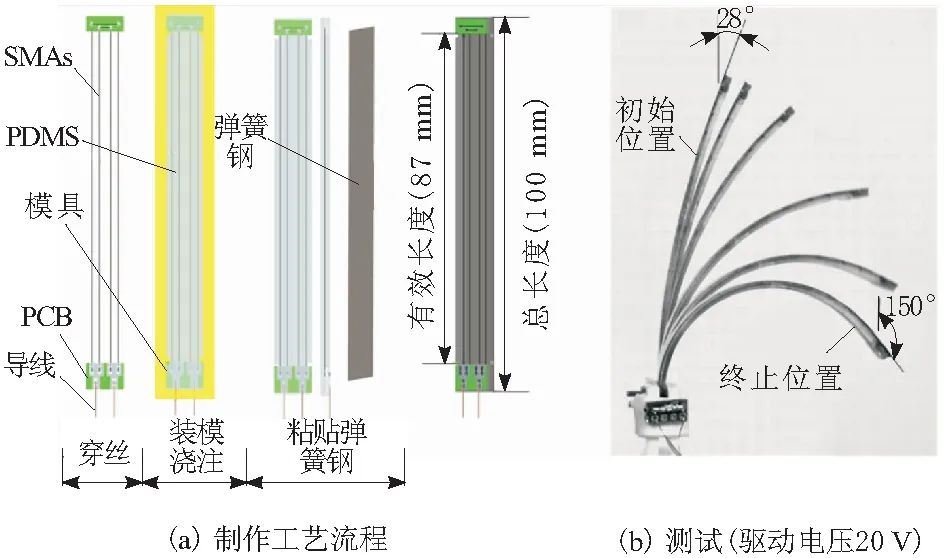
图1 SMA驱动模块制作工艺流程及测试
SMA驱动模块的平均电阻为6 Ω,误差小于0.5 Ω。为获得驱动模块最优的驱动电压,针对该驱动模块在不同加载电压下进行了一系列电性测试,采用高速摄影机对驱动模块弯曲过程进行采集记录,实验结果如图2所示。加热过程(图2a)的实验结果表明,随着加载电压的升高,驱动模块弯曲变形角度有增大的趋势,且能更快达到最大弯曲角度。冷却回复过程(图2b)的实验结果表明,过大的加载电压会导致驱动模块出现过冲抖动现象,严重影响了回复过程的时间,且存在更大的残余应力,造成驱动模块很难恢复到初始状态。因此合适的驱动电压对于驱动模块的性能至关重要,经过试验分析,当驱动电压为20 V时,驱动模块表现出相对较优的性能,此时该模块能产生150°的弯曲变形,及2.48 Hz的动作频率。
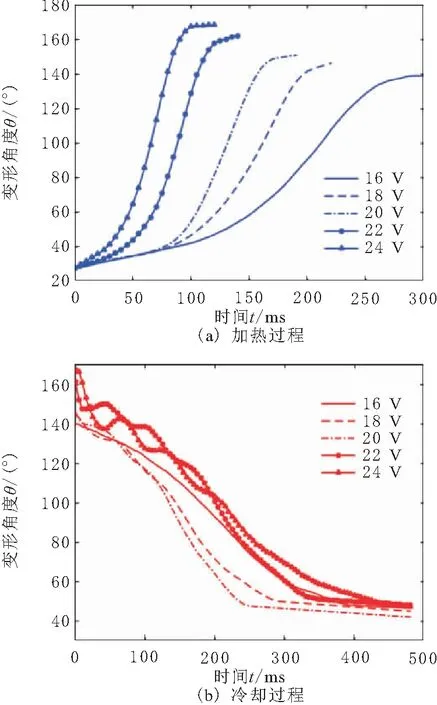
图2 SMA驱动模块不同驱动电压下的弯曲性能
1.2 仿生水母机器人
水母具有简单、柔软的对称结构[13],且大多数水母具有透明或者半透明的钟状体结构。作为水母游动的主要结构,钟状体的直径小至2 cm,大至2 m[8]。海月水母作为常见的水母之一,其钟状体最大可达45 cm,海月水母机构细节如图3所示。
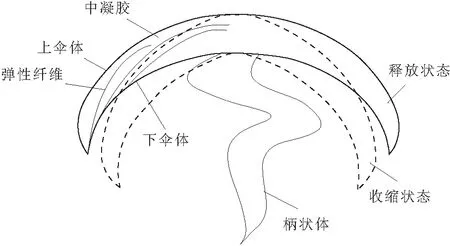
图3 水母结构拓扑
水母钟状体外部和内部称为上伞体和下伞体,上表皮和下表皮之间为中凝胶层,凝胶层存在弹性纤维[7]。海月水母动作周期分为2步,下伞体肌肉缩短将钟状体内部的水排出,形成推进力,同时上伞体和弹性纤维储存的弹性能量;海月水母没有回复钟状体肌肉,依靠存储在弹性上伞体和弹性纤维能量回复到释放状态[10]。
为模仿海月水母的结构和动作,利用SMA驱动模块设计如图4所示的可模块化组装水母机器人样机。该样机采用6组SMA驱动模块呈辐射对称分布,电池组采用6节动力电池(NITECORE IMR18650,输出电压为3.6 V,最大电流为30 A)环形分布,电池组有效输出电压为20.6 V,电池组及控制电路内置在中心盒,钟状体使用厚度为1 mm的弹性硅胶蒙皮。该样机重512 g,密度为1.031 g/cm3,在松弛状态如图4b所示,直径为210 mm,高度为80 mm。当机器人处于收缩状态时(图4c)直径为142 mm,高度为88 mm。

图4 水母机器人样机
2 控制系统
中枢模式发生器(CPG)是一种能在缺乏外部传感和反馈条件下产生节律输出生物神经网络,用于生物节律运动的控制,具有良好的稳定性和适应性[14-15]。目前,CPG模型主要分为2类,即神经元模型和非线性振荡子模型。瑞士科学家Ijspeert等人[14]构建的非线性自适应耦合模型是典型的非线性振荡子模型,该模型根据多个控制输入产生多个协调的节律信号,具有结构简单、耦合参数整定和输出正弦稳定等特点。本文对Ijspeert模型重构,并重新定义了模型的输出,使其能完成水母机器人的步态生成。重构后的模型数学描述为:
(1)
θi和ri分别为振荡子i相位和幅值的状态变量;fi和Ri分别为振荡子i的期望频率与期望幅值;wij和φij(φij=-φji)分别为振荡子j对振荡子i的耦合权重与稳态相位偏置;ai为正常数,它决定了系统调节时间;Si为系统的输出。值得注意的是,过大的wij和ai都会造成系统不稳定。本文对系统输出进行了二值化处理,因此期望幅值Ri并不会对系统输出产生影响,且耦合权重wij和调节常数ai分别设置为200和30,期望频率fi和相位偏置φij为系统的仅有可调参数。在上述模型的基础上,建立如图5所示的CPG网络。网络包含6个振荡子, 编号为振荡子1~6,分别用水母机器人6个SMA驱动模块的控制,各个振荡子之间的耦合关系如图5所示。该系统输出为频率、相位差可调的一组方波信号,不同的频率和相位差组合对应水母机器人不同游动模式。
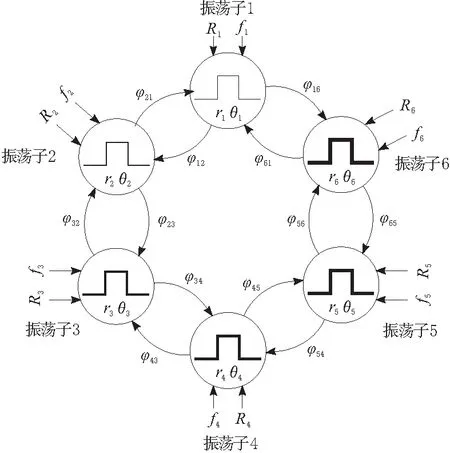
图5 CPG网络的拓扑
3 实验结果
上述提出的水母机器人的结构与控制策略,旨在完成水母机器人多模式游动,为了证明其有效性,进行了一系列水母游动实验。首先,测试水母机器人在竖直方向上不同频率的游动效果,如图6和图7所示。实验结果表明:当游动频率为2 Hz时,水母机器人获得最大游动速度为5.28 cm/s,此时虽然水母机器人在游速方面获得了很好的性能,但由于SMA驱动模块在加热过程存在热积累现象,会导致水母机器人快速进入热死寂状态,无法长时间持续游动。水母机器人在1 Hz时游动的时序如图8所示。

图6 水母机器人游动过程
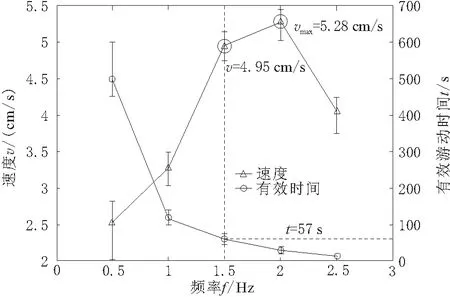
图7 水母机器人速度、游动时间与频率关系
当水母机器人的各个SMA驱动模块动作频率不同时,水母机器人两侧会产生差速,从而可以实现水母机器人转弯游动。且当水母机器人同一侧3个SMA驱动模块处于静止状态,另外3个SMA驱动模块以2 Hz的频率动作时,水母机器人可以获得最小的转弯半径,如图9所示,最小转弯半径为31.95 cm。
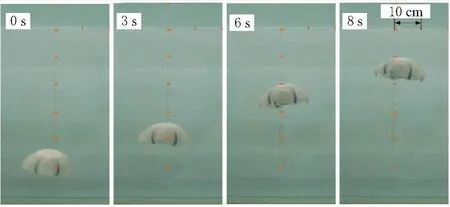
图8 竖直游动(1 Hz)
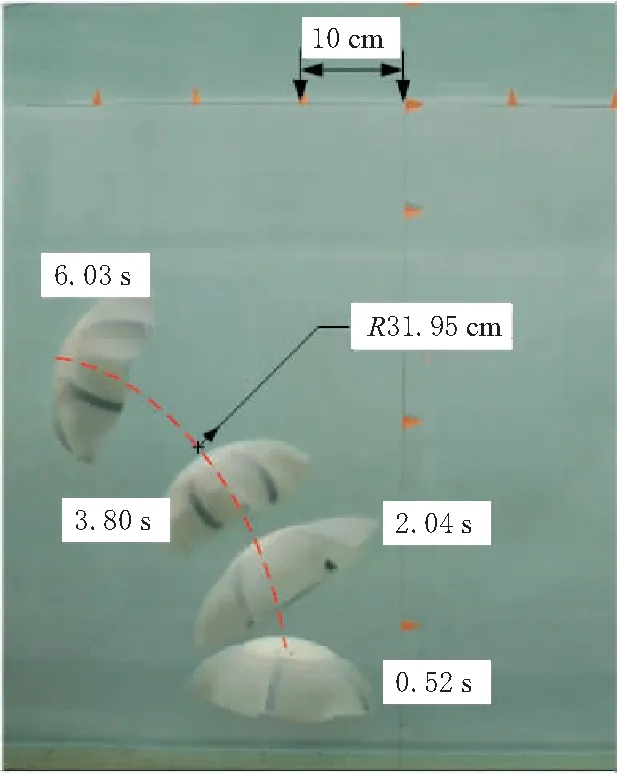
图9 转弯游动
4 结束语
提出了一种新颖的仿生水母机器人设计制造方案,该机器人采用射流方式推进,结构简单、易维护、噪声低、推进效率高,解决了传统水下机器人采用螺旋桨推进容易受到电缆、海带和废弃渔网等缠绕问题。为实现水母机器人周期性收缩释放动作,采用新的工艺流程和参数设计制造了一种基于SMA的驱动模块,该模块能实现大弯曲变形,超过预期要求。使用中枢模式发生器(CPG)控制策略,设计CPG网络,用于水母机器人的运动控制,虽然此控制方式不是很稳定,但一定程度上实现水母机器人在三维空间中的多模式游动。与参考文献中提到的几款水母机器人相比,本机器人具有更高的综合性能,如更高的仿生学、更大的尺寸和速度、能实现三维游动、无需外部电源等。在接下来的工作中,将会对水母机器人热死寂问题深入研究,寻求一种可行的有效的解决方案。
参考文献:
[1] Kim S, Laschi C, Trimmer B.Soft robotics: a bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013,31(5):287-294.
[2] Cianchetti M, Calisti M, Margheri L, et al. Bioinspired locomotion and grasping in water: the soft eight-arm OCTOPUS robot[J]. Bioinspiration and Biomimetics, 2015,10(3):035003.
[3] Clark A J, Tan X, McKinley P K. Evolutionary multiobjective design of a flexible caudal fin for robotic fish[J]. Bioinspiration and Biomimetics, 2015,10(6):065066.
[4] Hannan M W, Walker I D.Analysis and initial experiments for a novel elephant’s trunk robot[C]//2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2000:330-337.
[5] 谢子逸, 翟宇毅.一种新型水下机器人控制系统设计[J].机电一体化,2009,15(9):44-47,51.
[6] 何迪.海洋里的机器人[J]. 航海,1981(1):12-13.
[7] Marut K, Stewart C, Michael T,et al. A jellyfish-inspired jet propulsion robot actuated by an iris mechanism[J]. Smart Materials and Structures, 2013, 22(9):094021.
[8] Ko Y,Na S,Lee Y,et al. A jellyfish-like swimming mini-robot actuated by an electromagnetic actuation system[J]. Smart Materials and Structures, 2012, 21(5):057001.
[9] Jin H,Dong E,Alici G,et al. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires[J]. Bioinspiration and Biomimetics, 2016, 11(5):056012.
[10] Yeom S W, Oh I K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators[J]. Smart Materials and Structures, 2009,18 (8):085002.
[11] Shintake J,Ming A G,Shimojo M.Development of flexible underwater robots with caudal fin propulsion[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010:940-945.
[12] 李宝成,董二宝,李永新,等.新型SMA丝制动器的结构设计与实验研究[J].机械与电子,2010(1):7-8.
[13] Daniel T L.Cost of locomotion:unsteady medusan swimming[J].Journal of Experimental Biology, 1985,78(8):295-297.
[14] Ijspeert A J.Central pattern generators for locomotion control in animals and robots: a review[J].Neural Netw,2008, 21(4):642-653.
[15] 王扬威,闫勇程,刘凯,等.基于CPG的仿生环形长鳍波动推进器运动控制[J].机器人, 2016,38(6):746-753.
猜你喜欢
发明与创新·小学生(2022年5期)2022-05-12
哈尔滨轴承(2021年1期)2021-07-21
北华大学学报(自然科学版)(2021年3期)2021-07-13
动漫星空(兴趣百科)(2020年12期)2020-12-12
儿童故事画报(2020年8期)2020-10-30
电脑爱好者(2020年6期)2020-05-26
小学科学(2020年11期)2020-03-04
北京航空航天大学学报(2017年5期)2017-11-23
科普童话·百科探秘(2016年10期)2016-11-23
天津诗人(2014年4期)2014-11-14