
三维激光扫描仪在轨距提取中的应用研究
2018-06-28 02:03常占奎
铁道建筑 2018年6期
常占奎
(中国铁路上海局集团有限公司 工务处,上海 200071)
激光扫描是一种通过位置、距离、角度、反射强度等观测数据直接获取对象表面点三维坐标,形成点云数据,实现信息实时提取和准确重建三维场景的观测技术[1-2]。为更好地熟悉该项测量新技术,探索其在铁路勘测领域的应用,以提取既有线轨距为切入点,采用徕卡MS50三维激光扫描仪获取同济大学试验线点云数据,从中提取线路轨距,并与现场实测轨距值进行对比,以验证三维扫描仪在轨距提取中的有效性。
1 试验方案
本次试验选取同济大学试验线直线段,长度约70 m。考虑精度的需要,将扫描密度定为竖向间隔 0.001 m,水平间隔0.001 m。本次试验采用之字形施测,即线路两侧交错布设测站。测站间距控制在25 m左右,扫描区域适当重叠,采用后方交会法,保证多站扫描数据处于同一坐标系下。设站及转站要求与全站仪相同,本文不再赘述。扫描前,以道口板边线为基准,按间隔1 m测量线路轨距,并于轨头外侧做好标记。现场布设控制点后,进行外业数据采集,其步骤为:支架扫描仪/布置控制点→整平/参数设置/测量定位→扫描→转站→扫描→扫描预览。试验线点云图见图1。
图1 试验线点云图
2 测量数据处理
2.1 预处理
预处理主要包括删除多余的点云,去冗、除噪。主要结合STUDIO和CYCLONE软件进行处理[3]。
扫描作业不可避免会将人员、辅助设备等不必要的物体扫描到数据中,需要将这些大块无用的点云删除,降低计算量,提高计算机处理效率。该阶段主要借助CYCLONE软件完成。
相邻测站之间扫描重叠区域冗余的点云,以及由于测量设备的标定参数发生改变或测量环境突然发生变化等因素造成的噪声点,都会影响点云数据的精确性和光顺性,故必须去冗、除噪,消除外业数据采集过程中由于上述原因带来的模型表面非均匀的粗糙外表点云[4]。通过除噪、数据平滑,可降低模型在这些点处的偏差值。该阶段借助STUDIO软件完成。点云数据去冗、除噪效果对比见图2。
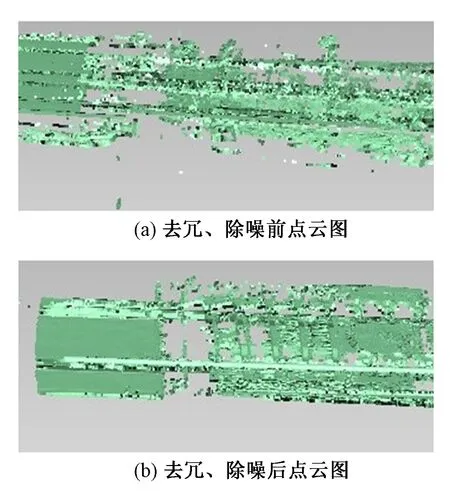
图2 点云数据去冗、除噪效果对比
2.2 封装
前述通过三维激光扫描仪采样得到的点云数据是离散的点集。封装是利用点云数据,通过一定的算法来恢复原始曲面的几何模型,即曲面重构的过程。三角网格面作为曲面的近似表达方式,是在三维空间中通过对各小三角片进行拼接而形成的网格面。点云封装的实质即是用许多细小的空间三角形来逼近还原CAD实体模型。
2.3 规则化处理及建模
初步封装后的模型存在一定缺陷,需在多边形模型阶段对其进行人工修补、调整等规则化处理,得到可操作的网格模型。图3显示了局部点云数据封装并规则化处理后的效果。
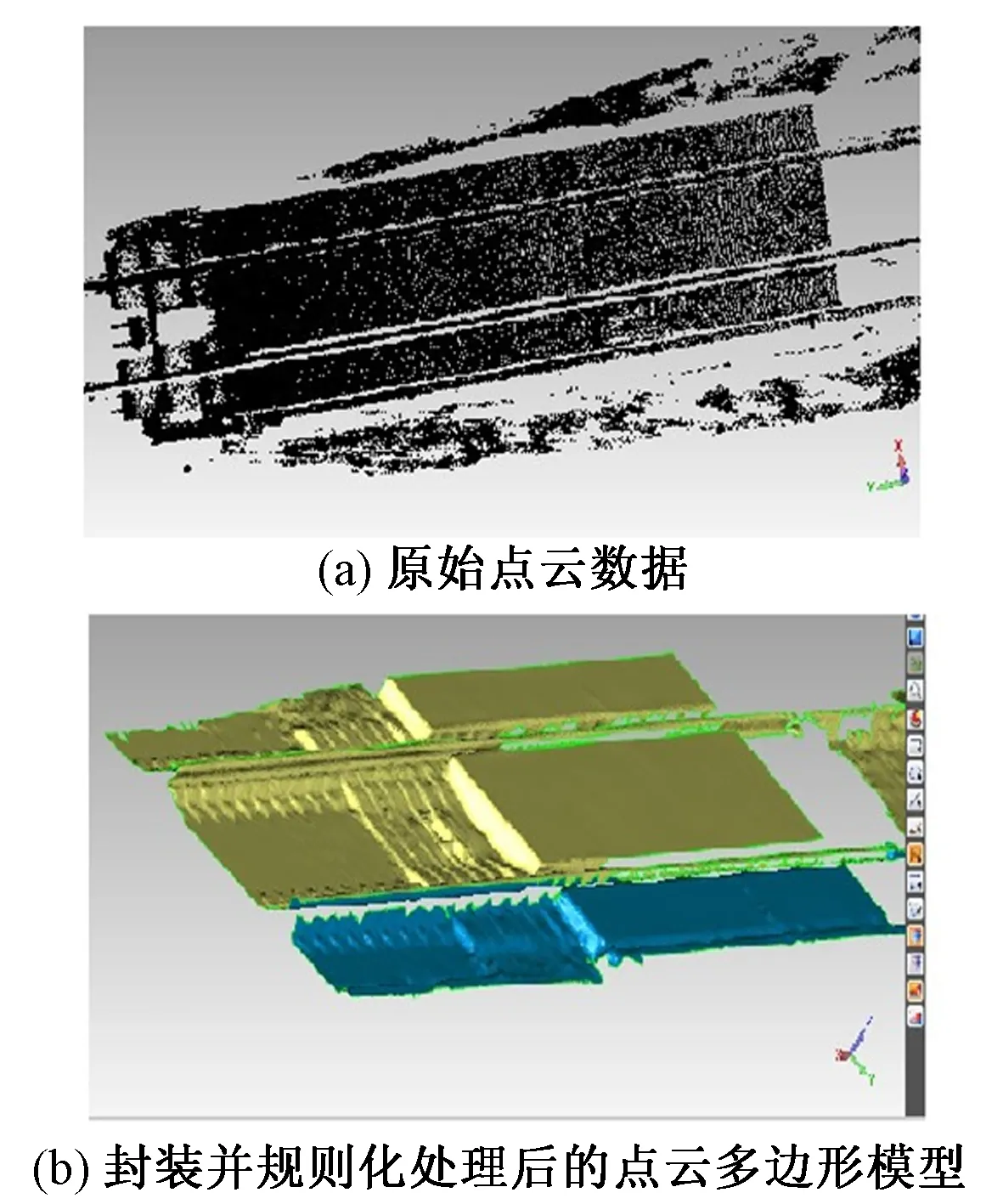
图3 点云封装并规则化处理前后效果对比
3 提取线路轨距
轨距的提取可在点云处理软件中直接进行,但在海量点云数据中选择测点直接进行连线操作需完全依靠主观性判断,偏差较大且工作量巨大,量测方向也不准确,因此是不可取的。图4为轨距随机测量,可知2次测量值分别为 1 473 和 1 493 mm,误差较大。
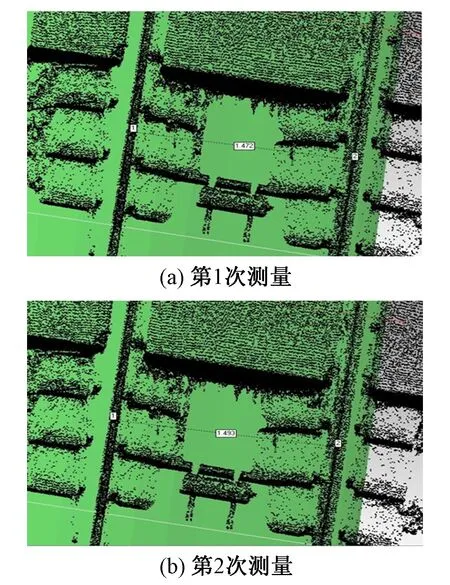
图4 轨距随机测量
针对在多边形模型阶段提取线路轨距数据,国内外专家学者做了大量的研究工作。文献[4-6]研究认为在多边形模型阶段截取特征截面薄片数据,并按照需要以一定间隔绘制线路法线,再以所得钢轨边为参照做修剪,结合CAD查询各线段长度及端点坐标,由此可得出线路轨距。此方法建立在将薄片数据视为一条直线的基础之上,所以理论上是三维操作,实际上是二维操作。
本次试验研究借助QUALIFY软件的模型偏差校验功能,以模型本身为基准模板,通过对比,在确保偏差为0的基础上,截取轨下16 mm处特征截面,再提取线路轨距,整个过程是在三维模型下的操作。
提取轨距关键技术在于特征截面的处理,其旋转角度需要和线路设备三维走向相匹配。如假设水平为x轴,纵向为y轴,则绕x轴旋转角θx为坡度与超高顺坡率的综合值,绕y轴旋转角θy在曲线地段为超高与轨道中心距的比值和轨底坡的综合值[7-8]。
以前期标注地段扫描数据为例,具体操作过程为:
1)多边形对齐。首先,将前期处理的点云模型导入QUALIFY软件中,并设为参考模型,然后重复导入点云模型,并将第2次导入的点云模型设为测试模型。
2)进行3D比较。局部模型的3D偏差情况如图5所示。观察可知模型最大上下偏差量为0,匹配度高,可进行下一步操作。
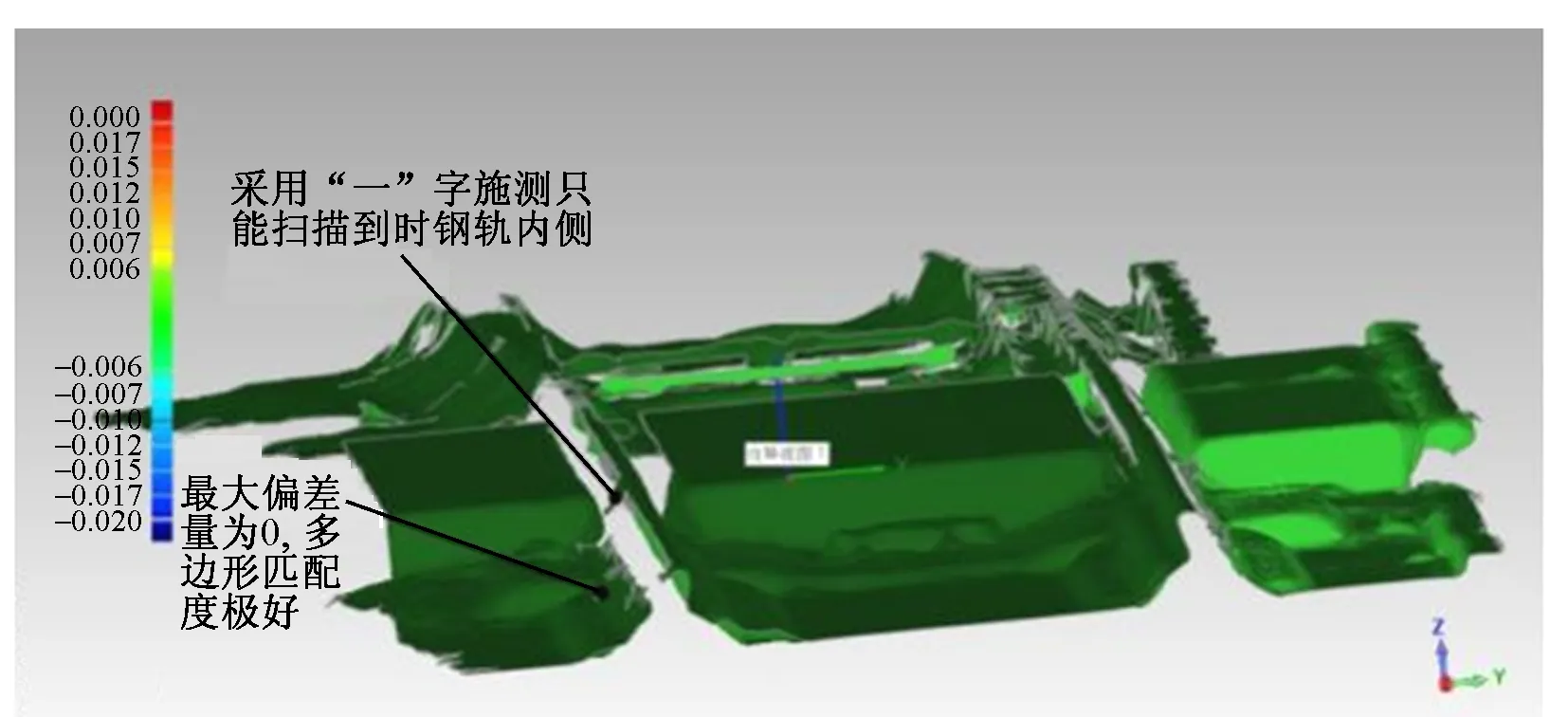
图5 局部模型3D偏差情况(单位:m)
3)进行2D比较。在封装的钢轨模型上,通过旋转x轴、旋转y轴和位置度参数的设定,给定钢轨平面初始贯穿截面,将初始截面下移16 mm[9],计算后得出2D特征截面。
4)提取轨距数据。基于特征截面,可以提取任意位置轨距数据并显示在视图中,软件自动记录数据信息。为便于比较,选取前期人工测量标记点进行轨距提取,每隔1 m量取轨距,软件自动显示轨距值并记录在屏幕下方的表格中,如图6所示。
5)数据导出、比较:将软件测量的数据发送至Excel表格,与现场人工实测数值进行对比,见表1。可知轨距的软件提取值与现场实测值基本吻合。
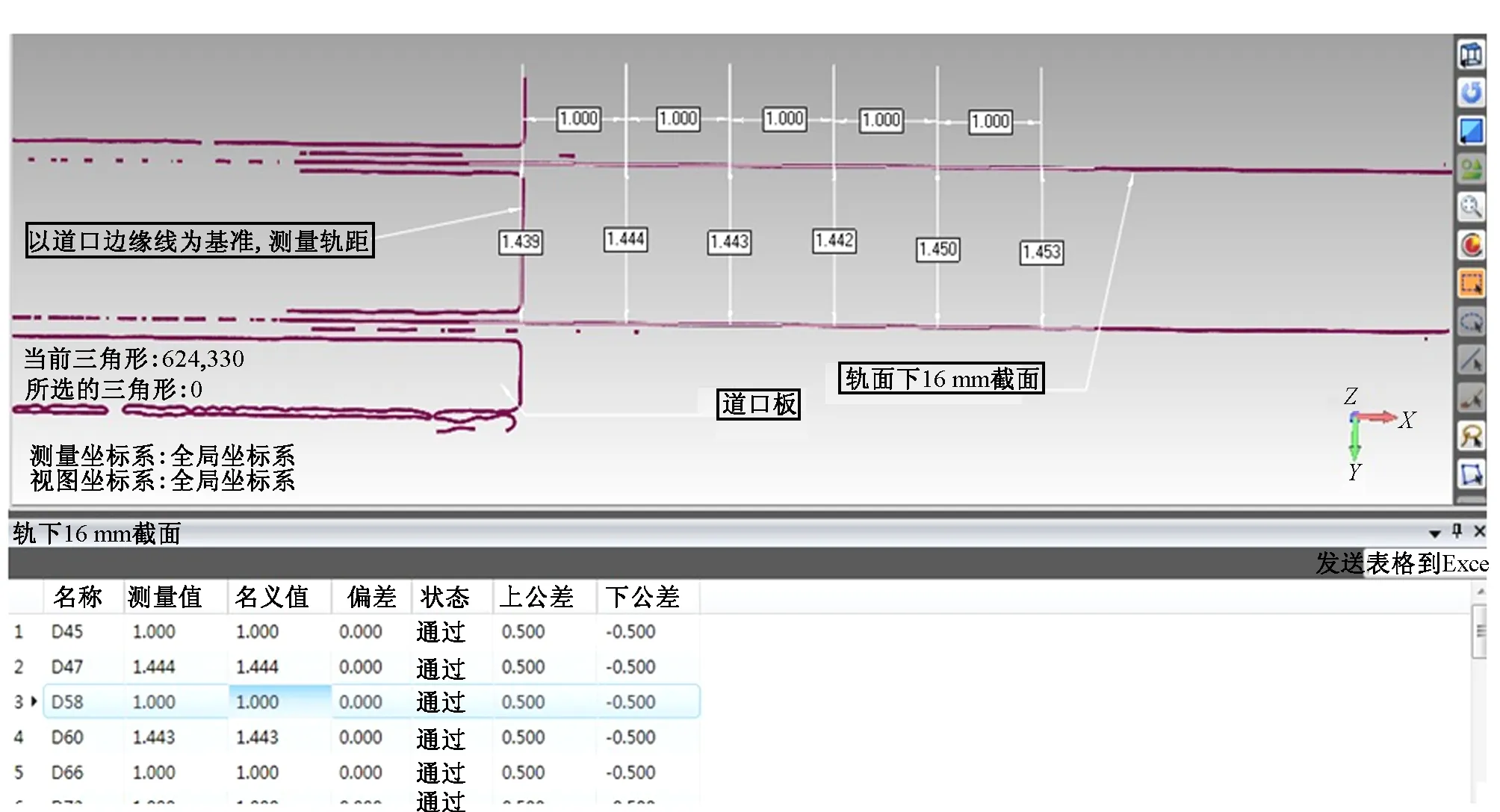
图6 采用软件提取轨下16 mm处轨距显示屏幕
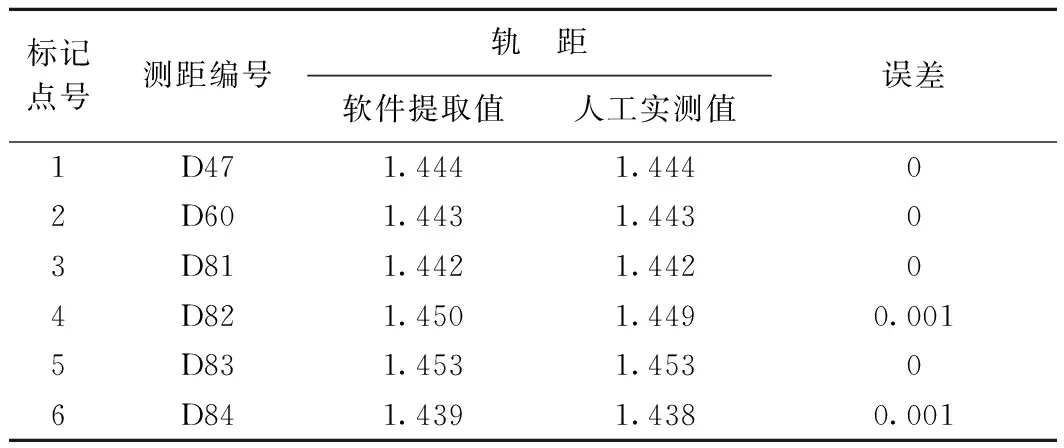
m
4 结语
针对三维激光扫描仪在轨距提取中的应用,本文从外业施测流程到内业点云数据预处理及轨距提取都做了详细的分析。经验证,软件提取值与现场实测值基本吻合。
本试验研究中有待进一步完善之处为:
1)仪器参数的设定对作业时间的影响较大,例如扫描间距越小,则扫描时间越长。如何合理地设置参数,仍需进一步探索确定。
2)STUDIO软件参数的设置对模型圆弧度等影响较大,需要进一步对比分析。
3)特征面的选取较为单一,和实际线路的平纵细部要求局部有出入,易产生由于量测位置不准确导致的测量误差。
在本研究的基础上,下一步研究方向为:
1)对采集的数据进行深度挖掘,研究提取轨向、道床断面等数据。
2)研究基于扫描数据的曲线整正方法。基于设计曲线要素建立标准曲线线路的三维模型,与既有曲线线路建立的模型进行三维和二维模式下的对比分析,提取既有曲线要素,显示与设计要素的偏差值,为曲线改造提供基础数据。
3)研究在道岔检测中的应用,特别是特大站场的道岔群检测作业,通过截面或特征面的构造完成几何线位数据的提取。
[1]段培勇,薛峰,谢锦妹,等.激光扫描技术在铁路限界检测中的应用研究[J].铁道建筑,2013,53(8):89-92.
[2]卓宝熙.铁路工程勘测技术的回顾、现状与展望[J].铁道工程学报,2007,24(1):6-12.
[3]成思源,杨雪荣.Geomagic Studio逆向技术建模技术及应用[M].北京:清华大学出版社,2016.
[4]韩峰.基于点云信息的既有铁路状态检测与评估技术研究[D].成都:西南交通大学,2015.
[5]白杨军,段晓峰.激光扫描技术在轨道施工质量自检中的应用研究[J].铁道标准设计,2014,58(6):23-27.
[6]李良英,韩峰.地面三维激光扫描技术在道路改扩建测绘中的应用研究[J].矿山测量,2016,44(5):24-27.
[7]徐进军,张毅,王海成.基于地面三维激光扫描技术的路面测量与数据处理[J].测绘通报,2011(11):34-36.
[8]李建强.地面激光扫描技术在既有铁路勘测中的应用研究[J].铁道建筑,2012,52(4):128-131.
[9]张毅,闫利,崔晨风.地面三维激光扫描技术在公路建模中的应用[J].测绘科学,2008,33(5):100-102.
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
商界评论(2022年1期)2022-04-13
社会观察(2020年2期)2020-11-17
学生天地(2020年6期)2020-08-25
铁道建筑(2020年5期)2020-06-20
铁路通信信号工程技术(2020年1期)2020-01-05
科技视界(2019年9期)2019-06-12
模具制造(2019年3期)2019-06-06
现代营销·经营版(2015年3期)2015-04-20
中国新技术新产品(2014年6期)2014-03-25
