
海上漂浮式风电机组空气动力特性的仿真模拟研究
2018-06-28 02:39:28上海电力实业有限公司刁晓伟
太阳能 2018年6期
上海电力实业有限公司 ■ 刁晓伟
上海勘测设计研究院有限公司 ■ 林琳*
0 引言
如今,风电机组市场对超过5 MW的大型海上漂浮式风电机组的需求大幅增加。对于漂浮式风电机组来说,由于在风浪流的联合作用下,漂浮式基础的运动响应较大,因此海上漂浮式风电机组所处的空气动力环境要远复杂于陆地和海上固定式风电机组。由于现阶段对仿真模拟方法和荷载估算能力的研究有限,使海上漂浮式风电机组的空气动力学分析成为挑战。漂浮式风电机组基础的平移和旋转运动会引入额外的有效风,纵摇和纵荡运动将导致转子很难在轴向流下运行。此外,由于引入了有效的风切变,穿过风电机组的无效风速发生了改变。除有效风的方向和大小发生变化外,与漂浮式风电机组基础运动相关的额外自由度也将引入额外的不稳定的流动,这都限制了分析方法的使用。因此,判断叶素动量理论方法是否仍然可以准确预报漂浮式风电机组的空气动力特性非常有必要。
气动荷载的预测是风电机组系统设计与仿真的基础。目前,已有许多理论来模拟风电机组的行为。因为漂浮式风电机组试验的缺乏,这些理论方法被用来验证风电机组的设计。目前,主要有3种风电机组气动性能分析方法,分别是叶素动量理论(BEM)[1]方法、涡格法(VLM)[2]和计算流体动力学(CFD)方法[3]。
BEM方法是根据动量理论所编写的一个简单的工程模型,用来验证漂浮式风电机组稳定性和结构承受荷载能力,如Bladed、FAST等,都使用了此基本气动计算方法。经典的BEM方法通过假设气动荷载和诱导流场之间的平衡来确定诱导速度。由于BEM方法不能模拟转子背后的湍流区、动态失速和偏航入流的情况,因此这些气动效应只能通过半经验修正模型来实现。然而, Sebastian 和Lackner的研究表明,经过普通修正的传统边界元理论不能准确模拟漂浮式风电机组的空气动力特性[4-5]。
VLM方法是一种可行的工程模型,它表明了非均匀效应与风电机组的垂直尾流相关。 Garrel[6]应用升力线自由尾迹方法,建立了空气动力仿真模型ECN’s AWSM。
CFD方法通过解Navier-stokes方程,提供各种物理模拟。用于风电机组模拟的CFD方法采用了先进的 Transition Modelling技术,再加上湍流模型和有效的滑动界面方法,解决物理模拟和数值模拟的挑战,因此,CFD方法是模拟流动分离和尾流干扰的合适选择。CFD方法可以用来研究流动的细节,而其他如BEM等基于势流理论的方法却不能做到。然而,CFD方法会显著增加计算成本,因此并没有在工程实际中得到广泛应用。瑞典斯德哥尔摩大学使用CFD求解器Flower 对MW级漂浮式风电机组进行了全三维CFD建模,并将风电机组在纵摇运动下的计算结果与BEM边界元法进行了对比[1]。美国可再生能源实验室(NREL)的研究结果表明[7],当前对风电机组的分析过分主观,且对参数的定义松散,对风电机组空气动力学物理现象的准确了解太少。
本文采用BEM和CFD两种不同的仿真模拟方法,对漂浮式风电机组在风浪流联合作用下的空气动力特性进行研究。通过对计算结果的比较分析,得出不同方法在气动荷载预测中的适用性和局限性。
1 仿真
1.1 仿真模型
OC3-Hywind漂浮式风电机组将NREL开发的5 MW风电机组模型安装在立柱式(Spar)平台上,作为研究模型。Jonkman[8]对风电机组及基础参数进行了详细说明,并公开了数据模型。图1描述了OC3-Hywind漂浮式风电机组的几何参数。
1.2 仿真方法
1.2.1 BEM方法

图1 OC3-Hywind漂浮式风电机组几何参数
应用基于BEM方法的仿真模拟软件FAST研究风电机组系统的动态响应。FAST软件普遍用于海上漂浮式风电机组的仿真模拟计算,通过耦合流体力学、空气动力学、结构力学和控制系统,进行漂浮式风电机组一体化分析。FAST仿真过程应用Aerodyn模块进行风电机组气动荷载的仿真;应用Hydordyn模块进行塔筒及支撑平台水动力荷载的仿真。所有的模拟都是从固定在原点的转子开始的,此处取水深320 m,海平面大气温度15 ℃,大气压力1.013×105Pa。本文选取风电机组运行的3种不同工况进行研究,分别是额定工况、低于额定工况、极限工况。表1分别描述了3种不同工况下的风和波浪荷载参数,并应用FAST软件计算得出不同工况下平台运动结果,如表2所示。
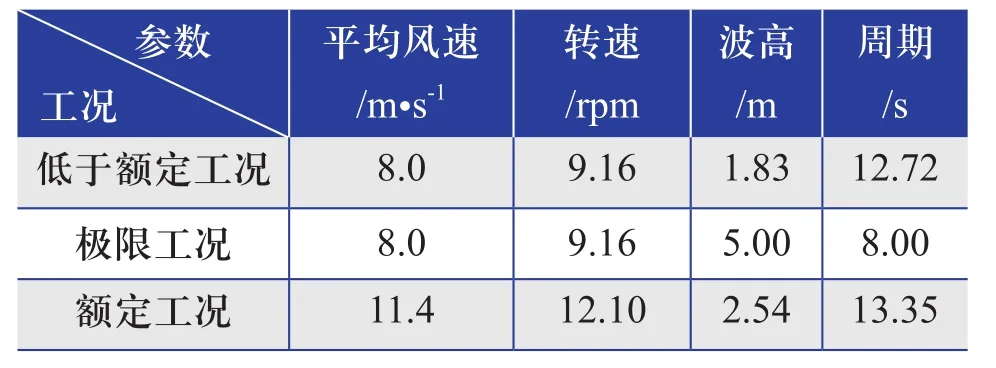
表1 风浪荷载参数定义
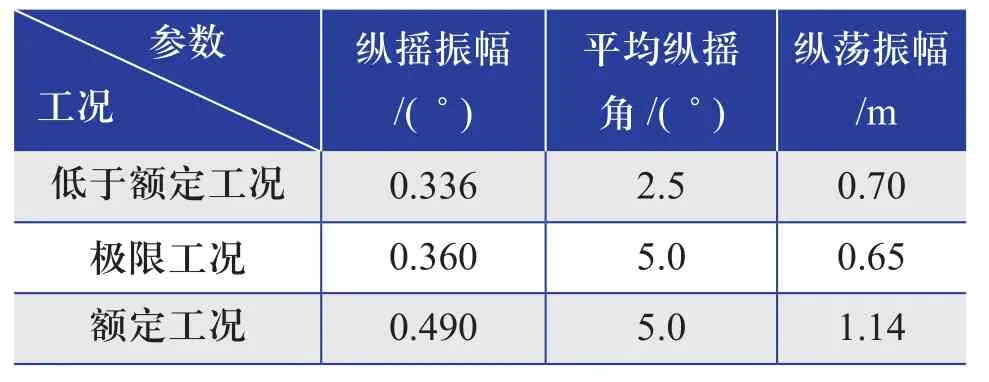
表2 平台运动参数
1.2.2 CFD方法
应用CFD商业软件STAR CCM+,对OC3-Hywind漂浮式风电机组进行仿真模拟计算。通过NREL公开的几何参数进行建模,三维几何模型如图2所示。CFD模型包括叶片附近的旋转区域和远离叶片的固定区域。这两个区域通过滑动边界和动网格技术相互作用,确保旋转域中的网格几乎无相对的节点位移。圆柱体计算域的长和直径分别是1291 m和630 m。从风电机组中心出发,向负方向(上游)和正方向(下游)分别延伸半径的5.5倍和15倍,如图3所示。数值网格中的单元格总数约为2800万个,图4为叶片和整个风电机组的网格模型。三维非定常流动的模拟是应用了雷诺平均Navier-Stokes方程的剪切应力运输湍流模型SSTk-w。本文对漂浮式风电机组的模拟采用了半耦合方法,即输入来流风并给定通过FAST计算得到的平台运动。由于纵摇和纵荡运动的自由度已经给定,平台运动可假设为由振幅(Amp)和频率(Freq)表示的一阶正弦函数,方程为:

式中,θpitch为纵摇运动的角度;θsurge为纵荡运动的幅度;t为时间;φ为相位差。

图2 OC3-Hywind漂浮式风电机组三维几何模型

图3 计算域
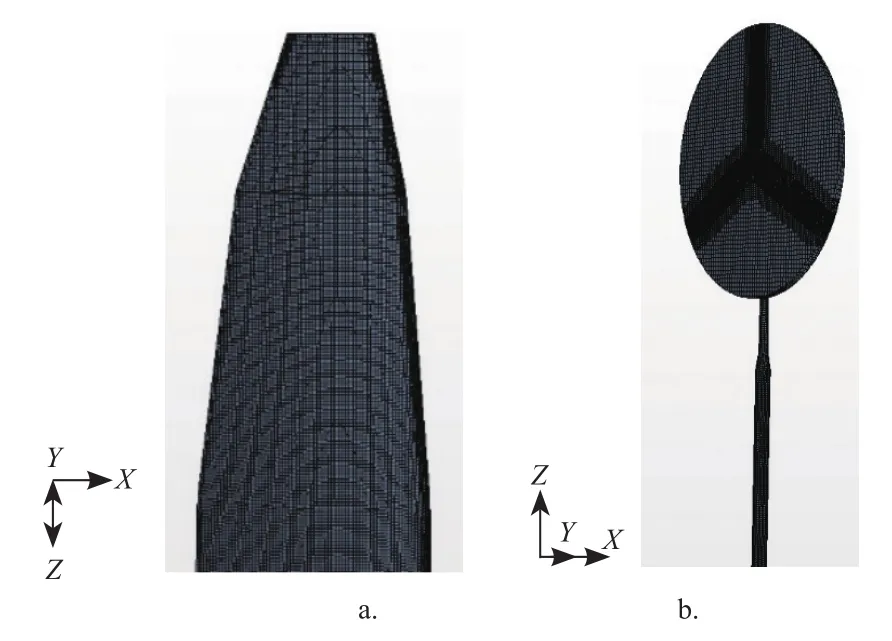
图4 CFD计算网格模型
2 数值分析
2.1 计算结果
图5~图13分别描述了OC3-Hywind漂浮式风电机组在不同工况、不同运动、不同计算方法下的功率和推力曲线。对CFD方法、BEM方法及动态尾流法(GDW)下的计算结果进行对比,并对比了纵摇-纵荡联合运动和6自由度运动下的计算结果。
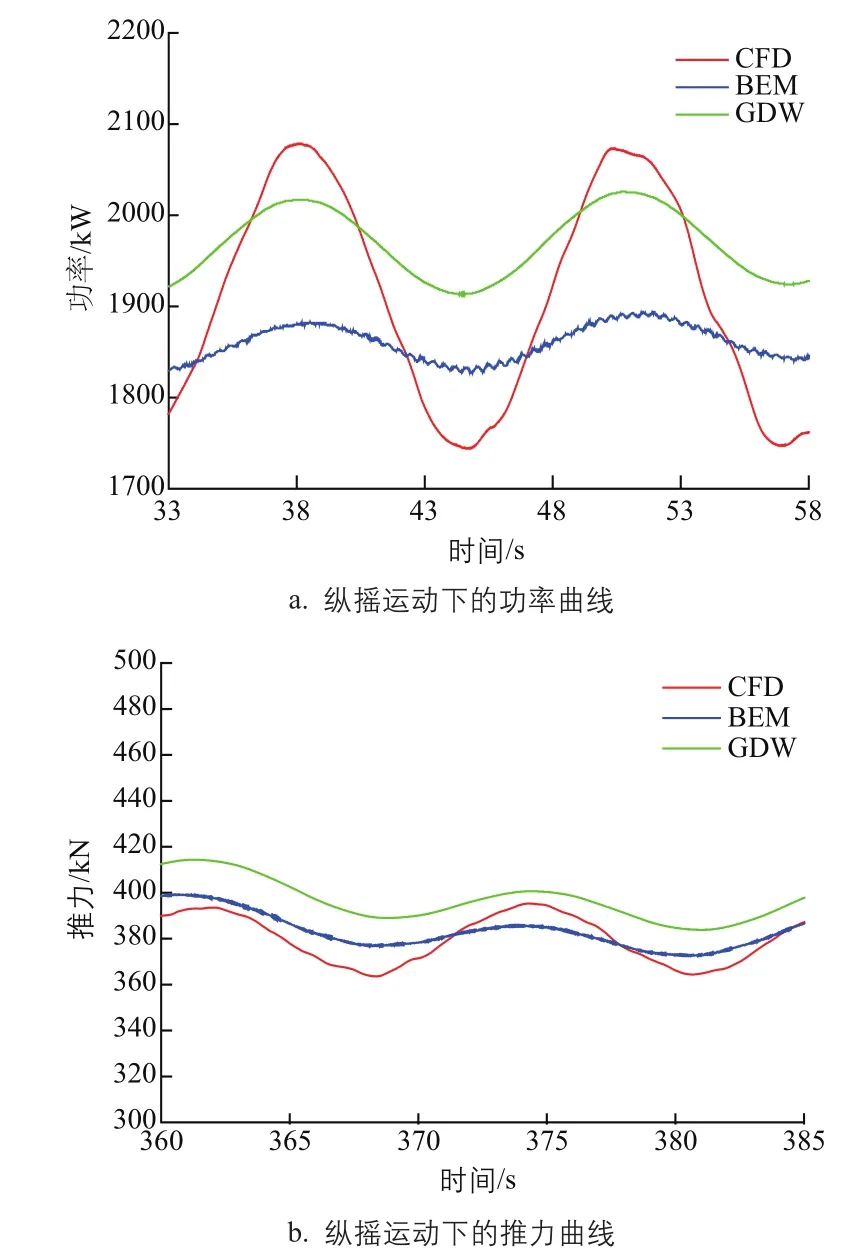
图5 低于额定工况下,漂浮式风电机组纵摇运动下的功率和推力曲线

图6 低于额定工况下,漂浮式风电机组纵荡运动下的功率和推力曲线

图7 低于额定工况下,漂浮式风电机组纵摇-纵荡联合运动下的功率和推力曲线

图8 极限工况下,漂浮式风电机组纵摇运动下的功率和推力曲线

图9 极限工况下,漂浮式风电机组纵荡运动下的功率和推力曲线

图10 极限工况下,漂浮式风电机组纵摇-纵荡联合运动下的功率和推力曲线
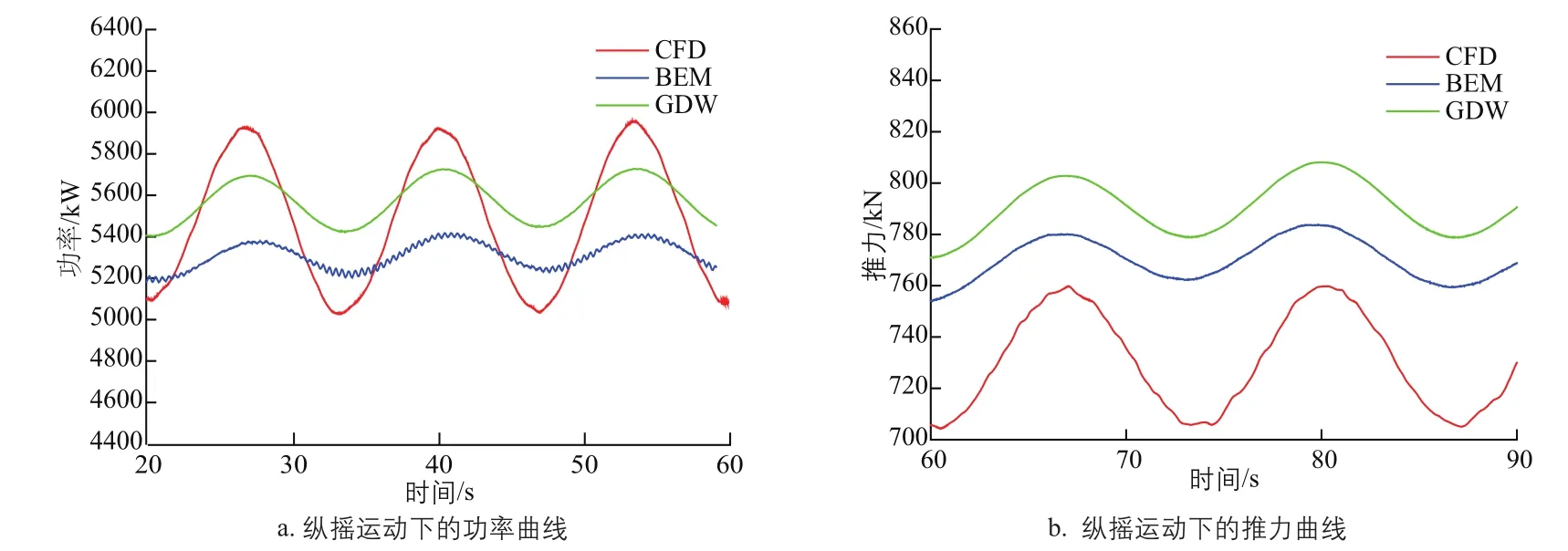
图11 额定工况下,漂浮式风电机组纵摇运动下的功率和推力曲线
图12 额定工况下,漂浮式风电机组纵荡运动下的功率和推力曲线

图13 额定工况下,漂浮式风电机组纵摇-纵荡联合运动下的功率和推力曲线
2.2 结果分析
非定常CFD方法可比其他方法更有效地预测气动尾流效应,因为其考虑了粘性效应和涡尾流,并考虑了风电机组叶轮绕轮毂中心旋转时的流场相互作用。图5~图13表明,应用BEM方法计算得出的功率值与CFD方法计算结果的差异值均小于15%。3种运动相比,纵摇-纵荡联合运动下,BEM方法与CFD方法计算结果的差异最大。因此,漂浮式风电机组在复杂剧烈运动下,采用BEM方法对空气动力的模拟准确度存在不确定性。此外,GDW方法的计算结果远高于BEM方法,而与CFD方法较为接近。在1/4周期,因为附加速度的增加,增强了叶片和流场之间的相互作用,而使功率增加;然而在4/4周期,由于附加速度的降低,功率减小;在2/4和3/4周期,叶片和流场之间的相互作用减弱。由此可见,附加速度和非轴向角对气动性能起着关键作用。
3 结语
通过对CFD方法、BEM方法、GDW方法的模拟结果进行对比,得出FAST软件在复杂工况下(风浪流联合作用下)与STAR CCM+软件的计算结果存在一定差异的结论,特别是在大运动的情况下,这种差异尤为明显。因此,需要进一步研究FAST软件在漂浮式风电机组空气动力特性的仿真模拟中的应用。
[1]Matha D, Schlipf M, Cordle A, et al.Challenges in Simulation of Aerodynamics, Hydrodynamics, and Mooring-Line Dynamics of Floating Offshore Wind Turbines[A].the 21st Offshore and Polar Engineering Conference[C].Maui, Hawaii, 2011-06.
[2]Minu Jeon, Seungmin Lee, Soogab Lee.Unsteady Aerodynamics of Offshore Floating Wind Turbines in Platform Pitching Motion using Vortex Lattice Method[J].Renewable Energy, 2014, 65(5): 207-212.
[3]Anand Bahuguni, Krishnamoorthi Sivalingam, Peter Davies, et al.Implementation of Computational Methods to Obtain Accurate Induction Factors for Offshore Wind Turbines[A].the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering[C].San Francisco, California, USA, 2014.
[4]Thomas Sebastian, Matthew Lackner.Offshore Floating Wind Turbines - An Aerodynamic Perspective[A].49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition[C].Orlando, Florida, USA, 2011.
[5]Thomas Sebastian, Matthew Lackner.A Comparison of First-Order Aerodynamic Analysis Methods for Floating Wind Turbines[A].48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition[C].Orlando,Florida, USA, 2010.
[6]Garrel A.Development of a Wind Turbine Aerodynamics Simulation Module[R].Technical Report ECN-C–03-079, 2003.
[7]Gordon L J.Challenges in Modeling the Unsteady Aerodynamics of Wind Turbines[A].21st ASME Wind Energy Symposium and the 40th AIAA Aerospace Sciences Meeting[C].Reno, Nevada, USA, 2002.
[8]Jonkman J, Butterf i eld S, Musial W, et al.Def i nition of a 5MW Reference Wind Turbine for Offshore System Development[R].Technical Report NREL/TP-500-38060, 2009.
猜你喜欢
天然气与石油(2022年4期)2022-09-21 07:05:54
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
甘肃科技(2020年20期)2020-04-13 00:30:40
测控技术(2018年9期)2018-11-25 07:44:24
能源(2018年6期)2018-08-01 03:42:00
能源(2018年6期)2018-08-01 03:41:56
能源(2018年8期)2018-01-15 19:18:24
风能(2016年12期)2016-02-25 08:46:38
火炸药学报(2014年3期)2014-03-20 13:17:39
凿岩机械气动工具(2014年3期)2014-03-01 04:00:07
