
法拉利悬架系统结构原理与维修(四)
2018-06-28 02:47:14浙江宁振华
汽车维修技师 2018年1期
浙江/宁振华
21.错误源参数
错误源参数如图43所示。
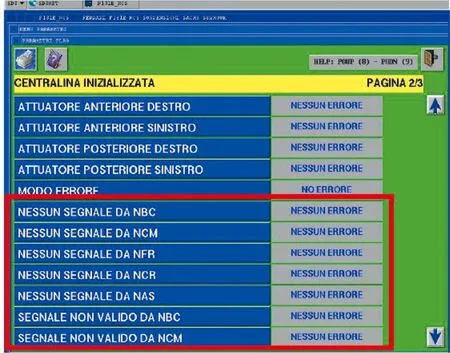
错误模式参数如图44所示。

┃图44 错误模式参数2
错误模式参数如表8所示。

表8 错误模式参数表
错误源CAN参数如图45所示。
┃图45 错误源CAN参数
22.系统诊断
电控单元可以诊断的错误分为三个类别(如图46所示):

┃图46 诊断的错误
◆关键错误
◆主要错误
◆次要错误
23.关键错误
关键错误如表9所示。

表9 关键错误
预期恢复∶
功率驱动器禁用,不再传输电流(故障安全模式)。
如果是电磁阀错误,错误失效和恢复解除工作,直至钥匙关闭。
24.主要错误
主要错误如表10所示。

表10 主要错误
错误检测时间为2.5s,当信息再次收到时,错误立即失效。
如果由于BUS-OFF 导致U1601错误,电控单元无法接收CAN上的任何信息。
如果BUS-OFF状况尚未解决,请勿处理任何其他CAN错误。
在这种情况下执行常规指示的测试∶
◆检查网络的特征阻抗
◆检查VBAT短路、接地短路或CAN电缆之间的短路
◆检查CAN接线是否正确和连通
25.次要错误
◆右侧前轮传感器
◆左侧前轮传感器
◆右侧前车身传感器
◆左侧前车身传感器
◆后车身传感器
(1)车轮传感器错误(C1021、C1022)
车轮传感器错误(C1021、C1022)如表11所示。

表11 车轮传感器错误
预期恢复:
限制传输的电流,用其他车身传感器的信号进行替代。
如果两个车轮传感器均出现故障,则信号设置为0。
如果有进一步的传感器故障,电流传输为常量(Skyhook禁用)。
(2)车身传感器错误(C1031、C1032)
车身传感器错误(C1031、C1032)如表12所示。

表12 车身传感器错误
预期恢复:
限制传输的电流,用其他车身传感器的信号进行替代。
如果有进一步的传感器故障,电流传输为常量(Skyhook禁用)。
错误失效,恢复过程在钥匙关闭时解除。
(3)后车身传感器错误(C1033)
后车身传感器错误(C1033)如表13所示。

表13 后车身传感器错误
预期恢复:
限制传输的电流,信号用以下计算值替代:(右侧前车身加速度+ 左侧前车身加速度)/ 2。
如果有进一步的传感器故障,电流传输为常量(Skyhook禁用)。
错误失效,恢复过程在钥匙关闭时解除。
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:30:50
少年博览·小学高年级(2022年6期)2022-05-30 20:26:20
小读者(2019年24期)2020-01-19 01:51:36
汽车观察(2019年2期)2019-03-15 06:00:34
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
作文大王·笑话大王(2016年6期)2016-06-22 11:33:08
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
作文大王·笑话大王(2016年4期)2016-04-27 11:40:20
作文大王·笑话大王(2016年1期)2016-02-24 11:25:51
汽车维修与保养(2015年7期)2015-04-17 02:12:44
