
弓网检测系统在全自动无人驾驶地铁中的应用
2018-06-27 09:43印祯民李春广曾要争
城市轨道交通研究 2018年6期
印祯民 李春广 曾要争
(1. 上海地铁维护保障有限公司车辆分公司, 200235, 上海; 2. 中车南京浦镇车辆有限公司, 201131, 南京; 3. 中车南京浦镇车辆有限公司, 201131, 南京//第一作者, 高级工程师)
近年来,全自动无人驾驶技术在城市轨道交通领域日渐升温。全自动无人驾驶地铁系统具有高度自动化、集中管理、节省人力等优势,但其全线运营过程没有司机和机械师随车维护,一旦出现故障很难及时发现并维修。部分发达国家已有较为成熟的运维管理经验。我国上海率先开始运营全自动无人驾驶线路,其运营维护管理尚在探索阶段。
目前,上海已在全自动无人驾驶线路运营列车上加装弓网检测系统并进行试验。该系统具有实时监测弓网运行状态的功能,一方面,通过大数据分析可对安全隐患进行预判,防患于未然;另一方面,能及时定位弓网事故,并及时检修,为智能运维提供有效手段和技术保障。
1 车载弓网检测系统的功能及组成
1.1 系统功能
车载弓网检测系统使用图像智能识别技术、紫外探测技术、红外热成像技术、激光三角测量技术、车底补偿技术及牵引电流实时监测技术等前沿技术,采用非接触式的检测方式,可实现对弓网动态在线实时监测。实时检测内容包括受电弓结构、羊角的变形和缺失,关键部位的完整性,弓网燃弧强度及持续时间,接触网的拉出值、导高值、跨距内接触线高低差及导线坡度,弓网接触点温度等。当弓网出现异常状况时,检测系统能实时告警,并能通过车地传输通道发送告警信息及检测数据到地面的OCC(运营控制中心)。
相关工作人员通过OCC监控大屏幕推送的报警信息,查看并确认故障数据后,根据故障严重程度选择控车或安排人员检修。弓网检测系统还能同时监测接触线横向偏移量及导高变化量,对线路趋势进行大数据分析,为线路施工质量提供评价依据,也为周期性维护提供数据支持和建议,便于维护决策。
此外,车载弓网检测系统还具备自动化和智能化特点,操作简单,便于安装调试。其具体功能如下。
(1) 受电弓结构异常检测功能。弓网检测系统可实时监控弓网状态并保留高清视频记录,以便后续的复查和分析。弓网检测系统采用高速高清摄像头进行全线路、全天候工况下的弓网视频监视,且视频记录时间不小于360 h。弓网检测系统分别从受电弓的开口和闭口方向对受电弓进行结构异常检测,能实时检测受电弓及羊角变形及缺损,同时还能对受电弓关键结构(如上框架、平衡杆、拉杆、下臂杆等)进行完整性检测,如发现异常可实时报警。
(2) 弓网燃弧检测功能。运用紫外探测技术可实时检测车辆运行过程中的拉弧现象(燃弧强度、燃弧时长、燃弧率等),并能自动报警。
(3) 弓网温度检测功能。可实时检测弓网接触点温度,如温度超限自动告警。
(4) 接触网几何参数检测功能。可检测接触网的拉出值及导高值,如超限时则自动告警。并可精准检测跨距内接触线高低差及导线坡度。
(5) 刚性接触网悬挂检测功能。可实时检测刚性接触网悬挂结构异常状态,关键悬挂结构一旦发生变形、破损、移位及螺栓松脱等异常状况,可及时报警。
(6) 数据分析功能。弓网检测系统设置了车载及地面服务器,可对跟踪过程中的报警数据进行查询、统计、分析及管理,能独立实现全程实时录像、检索回放、录像查询及下载等功能,可显示系统报警事件发生的准确地点及时间,能自动记录事件发生前后的视频。可通过网络实时调用查看受电弓监控实时视频及故障信息等。
1.2 系统组成
弓网检测系统主要由车顶数据采集与传输设备、牵引电流监测设备、刚性接触网悬挂检测设备、车内分析服务器、车底补偿设备及地面数据中心系统组成。所有的受电弓状态视频监控装置共用1套地面服务器。弓网检测系统拓扑图如图1所示,设备安装分布图如图2所示。
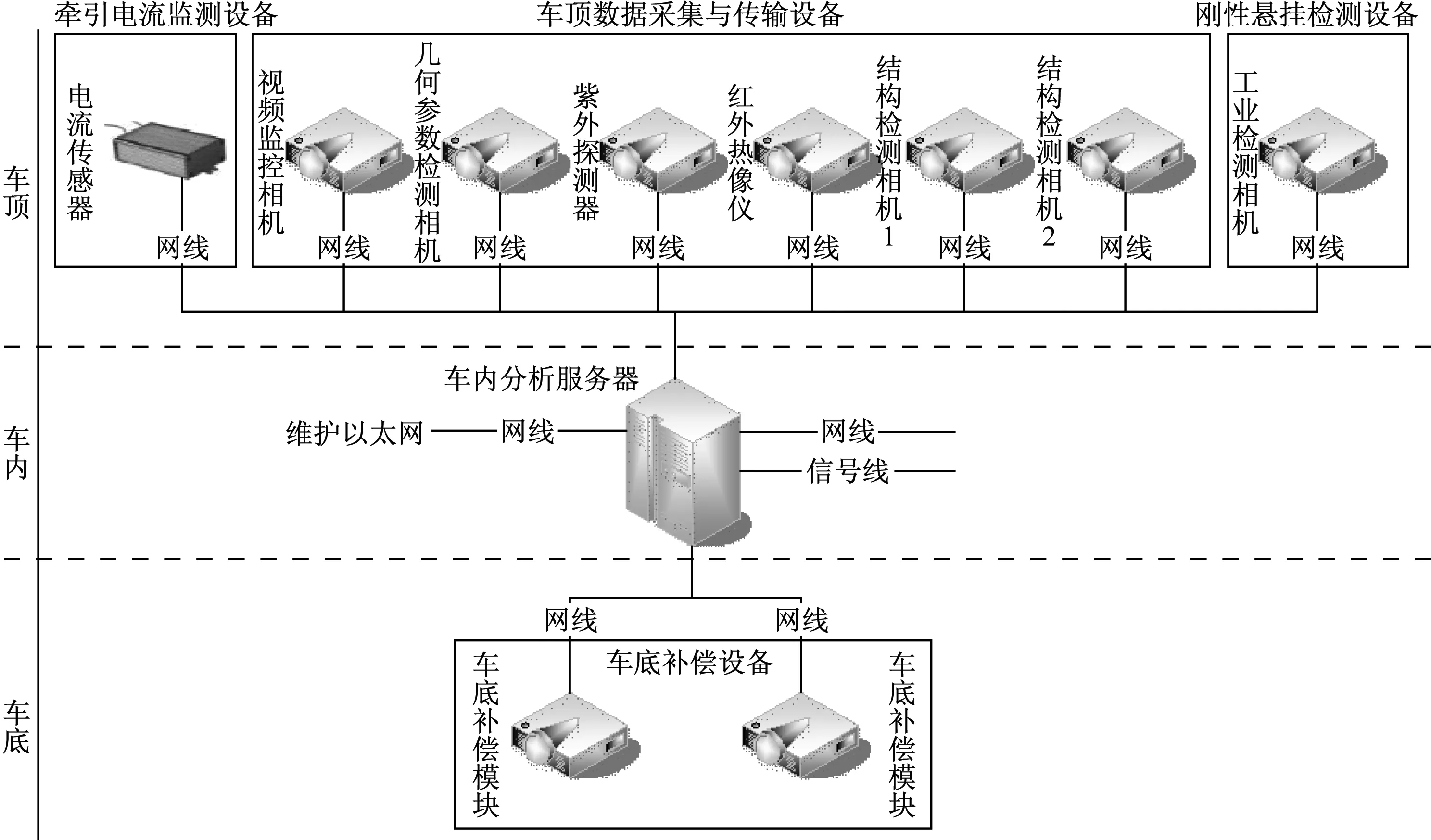
图1 受电弓状态视频监控装置拓扑图
车顶数据采集与传输设备按功能划分为高清视频采集模块、结构异常采集模块、紫外检测模块、红外热成像模块和几何参数检测模块。所有模块采集到的数据通过网线传输到车内分析服务器内。牵引电流检测设备采集到的数据通过网线传输到车内分析服务器。车底补偿设备采集到的数据通过网线传输到车内分析服务器。
车内分析服务器对各设备传来的数据进行分析处理并与车内TCMS(列车监控管理系统)、地面OCC系统进行通信。车内分析服务器分为6大模块:TCMS通信模块、燃弧率检测模块、几何参数检测模块、结构异常检测模块、视频处理模块、温度处理模块和刚性悬挂处理模块。
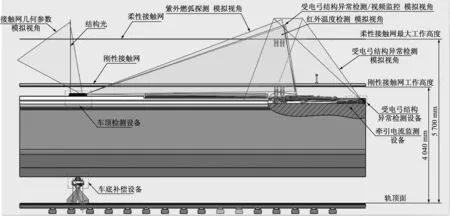
图2 系统设备安装分布示意图
2 弓网检测系统的创新技术
2.1 受电弓结构异常检测技术
受电弓结构异常检测技术采用2组高清工业相机分别从受电弓开口和闭口方向,对受电弓结构进行高清拍摄。通过对采集到的图像与标准模板进行比对分析,自动识别判断是否有碳滑板、羊角异常或丢失、异物入侵等异常状态。其中,开口方向的检测相机集成在车顶采集与传输设备内,闭口方向的检测设备用来拍摄受电弓其他关键部位结构,可提高对受电弓结构异常检测的完整性。
2.2 燃弧检测技术
燃弧检测技术主要检测燃弧强度、时长,以及牵引电流值,并计算燃弧率。燃弧率为接触网工况质量评定标准。
根据EN 50317—2002标准有:
式中:
NQ——燃弧率;
tarc——持续时间超过1 ms的拉弧时长;
ttotal——测量时段内牵引电流超过额定电流 30%的时间总和。
燃弧率检测需分别对牵引电流和燃弧持续时间进行监测。对受电弓牵引电流的监测利用霍尔效应监测技术,将霍尔直流电流传感器包覆在受流电缆外部,可实时监测受流电缆中的电流值变化。弓网燃弧检测采用紫外探测器对燃弧主要辐射方向的220~329 nm范围内的紫外光线进行实时监测,可测得燃弧强度及持续时长等参数。
2.2.1 牵引电流监测技术
牵引电流监测装置内置1台霍尔电流传感器。其检测原理主要基于霍尔效用,当电流通过1根长导线时,在导线周围将产生磁场。该磁场的大小与流过导线的电流成正比,可通过磁芯聚集感应到霍尔器件上并使其有1个信号输出。信号经信号放大器放大后直接输出。
2.2.2 燃弧紫外探测技术
燃弧紫外探测基于金属的光电发射效应和电子繁流理论。
燃弧紫外探测模块由高感光紫外探测器和信号处理模块组成。燃弧发生时会释放大量的紫外光线。紫外探测器接收到紫外光线时发出脉冲信号。信号处理模块处理脉冲信号后可得到燃弧发生持续时间和强度。
只需将受流电缆穿过霍尔电流传感器的检测口即可实时检测电流值。根据受流电缆的排布情况及设备安装位置,霍尔电流传感器可选择圆形、方形或矩形检测口。
2.3 弓网温度异常检测技术
弓网温度异常检测技术主要检测弓网接触区域的高温异常点,其检测设备集成在车顶数据采集与传输设备中。检测设备内置1台全局高清高速红外热像仪,可对目标区域进行全画幅高清拍摄扫描。
获取接触网-受电弓运行受流温度场的热像图像,同时提供准确的热像图像中的高温点和分布图;通过红外热像仪的图像识别技术,可自动框选标注受电弓以及接触网的温度情况,并且进行实时的温度分析;计算当前弓、网接触点处的温度,与其他定位信息一并写入数据库,以便用户查找分析。通过检测温度,可发现沿线架空接触网和受电弓的温度异常,及时阻止事故的发生,将风险降到最低。
2.4 接触网几何参数检测技术
接触网几何参数检测技术主要检测接触网几何参数,包括拉出值、导高、跨距内接触线高低差、导线坡度等。其检测设备主要由几何参数测量模块和车底补偿模块组成,前者集成在车顶数据采集与传输设备中,后者安装在车底,并采用专用安装支架和封装。
2.4.1 几何参数测量技术
几何参数测量技术采用2组工业相机和1组线状激光器作为主要视觉检测器件,利用激光三角测量法对接触线进行识别追踪,测量接触线的拉出值和导高值。当列车前行时,激光器发射线性激光照射在接触线上,形成明亮的光斑(见图3)。随着接触线空间位置的不同,图像中激光光斑的位置相应变化。通过对光斑的定位即可测算出接触线的导高和拉出值。在不考虑轨面高度变化的前提下,光斑距离图像底端的距离可反映导高值,光斑偏离图像中心的距离可反映拉出值的变化量。
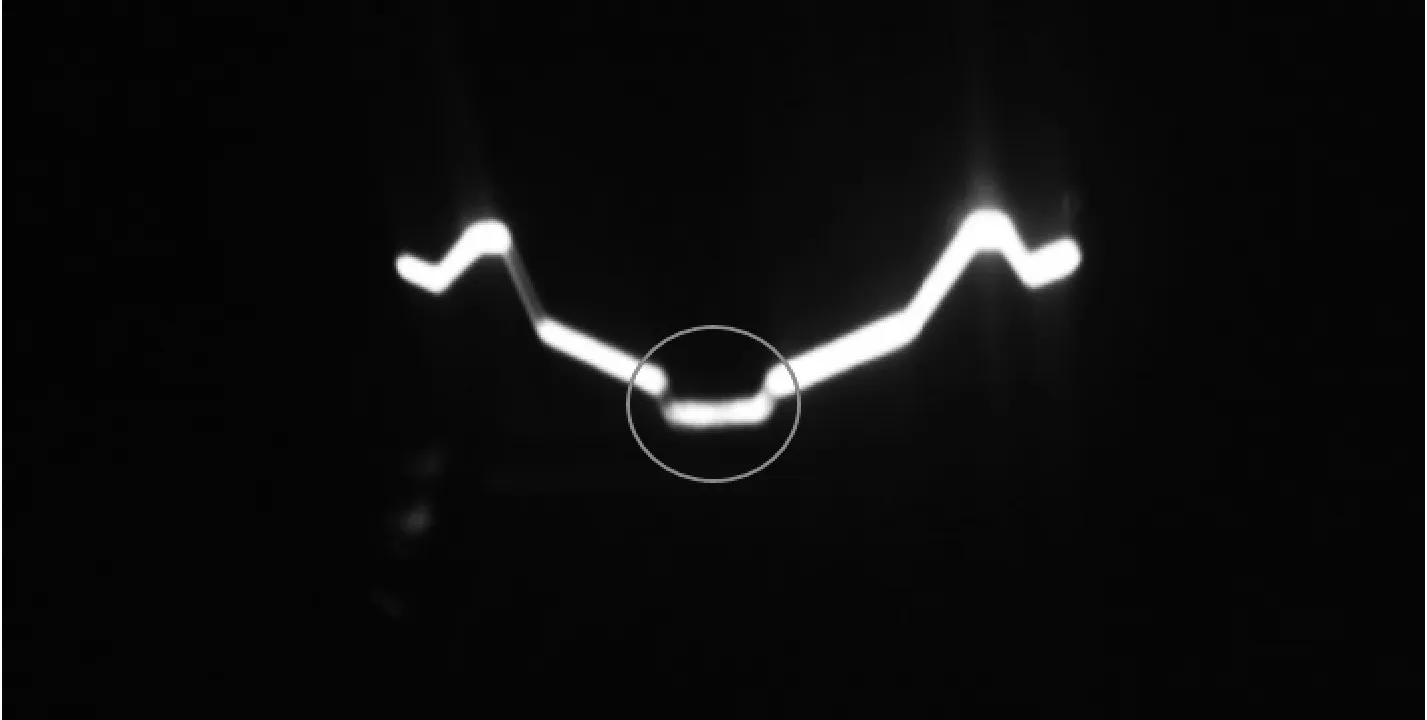
图3 刚性接触网实拍图像
2.4.2 车底补偿技术
车底补偿技术利用高清工业相机和激光器,测量列车相对于左右轨道的偏移量和列车运行过程中倾斜程度,可修正拉出检测值及导高检测值,有效提高测量精准度。
当车体发生上下振动时,导高值随车体振动发生变化,拉出值不变。车体向上运动时,导高测量值H增加,向下运动时H减小,即可得到导高偏移量ΔH;将ΔH补偿到车顶测量值中,即可得出实际导高值。当车体发生左右偏移时,导高值不变,拉出值随车体摆动发生变化。根据拉出测量值,即可得出拉出值的偏移量ΔL;将ΔL补偿到车顶测量值中,即可得出实际的拉出值。
当车体发生倾斜时,拉出值和导高值随车体倾斜同时发生变化。通过拉出测量值及导高测量值,即可得出拉出值的偏移量ΔL和导高偏移量ΔH;将ΔL和ΔH补偿到车顶测量值中,即可得出实际的拉出值和导高值。
当列车发生蛇形偏转时,导高值不变,拉出值随车体蛇形偏转同时增大。根据拉出值增大前后的测量值,以及左右激光装置之间的距离,可计算出车体蛇形偏转的角度θ,进而即可换算出实际拉出值。
2.5 刚性接触网关键悬挂检测技术
刚性接触网关键悬挂检测装置(其分布示意图见图4)配置了2组可见光高清工业相机,分别对刚性接触网汇流排、中间接头、膨胀接头、悬吊安装底座、分段绝缘器、刚性悬挂绝缘子、线岔状态等关键部位拍摄高清图像,同时拍摄区域可覆盖地铁刚性悬挂接触网的零部件区域。每组相机分别从被测物的正反两面进行拍摄,确保全方位、全角度覆盖被测区域所有可视部件。
弓网检测系统利用图像处理技术和神经网络算法,可通过智能分析自动识别绝缘子倾斜及破损、中间接头螺母脱落、接触线脱槽、汇流排损伤、中间接头松动、膨胀接头零件松脱等接触网关键悬挂部件的异常现象,还可监控并自动识别线岔区域状态。
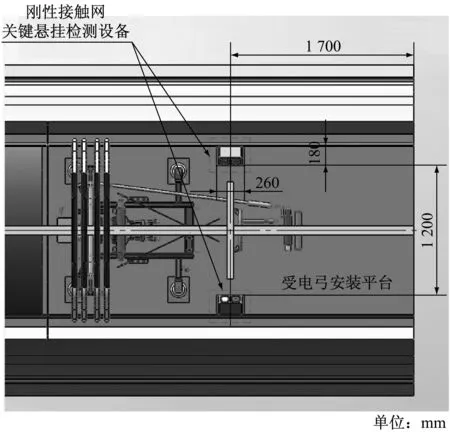
图4 刚性接触网关键悬挂检测装置分布示意图
由于刚性接触网的关键悬挂主要集中在接触线(汇流排)的两侧,所以在车体中线两侧各布置了1套接触网采集装置,其采用定帧率(25帧/s)进行拍摄,可适应120 km/h的最高车速。
2.6 OCC全局监控技术
OCC全局监控技术主要通过大量数据的不断积累,构建基于云的弓网检测智能运维及安全监测分析管理平台,逐步形成弓网的智能检修。
(1) 发生故障时,云平台根据联动数据和类似处理结果,及时给出应急处理意见。
(2) 根据各线路和车辆状态,制定检修计划和检修内容,实现动态修。
(3) 综合运营和检修情况,对运营线路和车辆进行评价,为新建线路提供指导。
车载弓网检测设备通过车地网络实时反馈报警信息和故障数据,并将报警信息推送至OCC监控大屏。维护管理人员可通过报警信息查看相应故障数据,确认后执行对应操作。
OCC能利用码流技术调取每列车每个受电弓的实时监控视频,实现全局监控。
3 结语
弓网检测系统通过融合多项技术实现了对无人驾驶列车的在线实时监测,能自动识别并检测绝大部分弓网运行的异常状态,能利用车地通信网络向OCC推送报警信息和故障数据,再由OCC对全线列车进行集中管控。这极大提高了城市轨道交通运营安全监测和管理维护效率。实践证明,利用前沿技术进行技术革新,从而促进城市轨道交通行业发展和完善是十分可行的。通过长期数据积累和基于神经网络的深度学习,未来可真正实现无人驾驶、无人监管的智能列车自动化运营系统。
[1] 于万聚. 高速电气化铁路接触网[M] . 成都: 西南交通大学出版社,2002.
[2] [德] 基布岭. 电气化铁道接触网[M] . 中铁电集团有限公司,译. 北京: 中国电力出版社,2003.
[3] 李丰良, 唐松花. 受电弓的力学分析示例[J]. 铁道学报, 2000, 22(5): 21.
[4] 梅桂明, 张卫华, 刘红娇. 不同结构类型接触网动态特性[J]. 交通运输工程学报, 2002, 2(2): 27.
[5] 王平均.基于MATLAB图像增强算法的应用[J].辽宁高职学报,2013(7):123.
[6] 袁丽婷.基于MATLAB的医学图像增强与边缘检测算法的实验研究[D].西安:第四军医大学,2009.
[7] 姜庆伟.基于模糊理论的图像增强技术研究与实现[D].上海:华东师范大学,2009.
[8] 朱晓恒.受电弓典型故障图像检测算法的研究[D].成都:西南交通大学,2011.
[9] 陈维荣.受电弓滑板状态监测的图像目标提取[D].成都:西南交通大学,2010.
猜你喜欢
铁道机车车辆(2021年5期)2021-11-19
科技风(2019年11期)2019-10-14
测控技术(2018年8期)2018-11-25
机械管理开发(2018年6期)2018-07-06
铁道科学与工程学报(2018年4期)2018-04-26
时代农机(2018年12期)2018-02-14
电气化铁道(2016年4期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
铁路通信信号工程技术(2014年6期)2014-02-28
计算机辅助工程(2012年5期)2012-11-21
